Известны yiCTpoiic.TiBa для ypaiBiHOBeujH-BaiHim подв11|Ж,ных узлОВ, перемещаемых по налравляющиМ .относительно (неподвижного узла.
:П|р.едлагаемое устройство отличается от известюых тем, что гидроцилиндры управляются регулятором, на который воздействуют не менее чем два датчика, непосредственно измеряющие изменение давления или зазора в направляющи.х. Это обеспечивает более высокую точность урав:новещива1ния подвижного узл а.
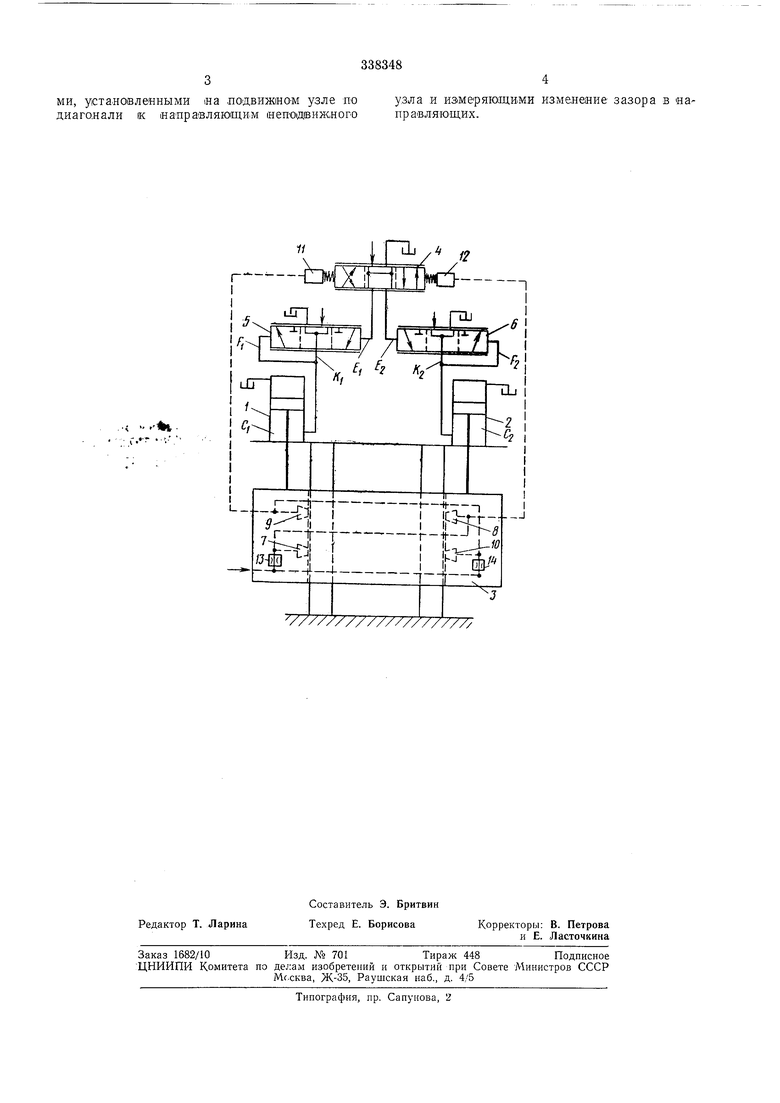
На чертеже изображена -гидравлическая схема описываемого устройства для уравновещивания подвижных узлов.
Устройство содержит ,два гидравлических цилиндра / и, 2, связываюииьч подвиж1НЬ Й узел 3 с неподвиж1ным, гидравлический релулято|р 4, гидроусилители 5, 6, в которых .камеры управления FI и FZ соедииены с выхО|Диыми каналаМИ Ki и Kz и даггчики управления 7, 8, 9, 10, включенные .попаряюипараллельно и через преобразователи 11, 12, воздействующие на гидравлический регулятор 4. Два дросселя 13 и 14 обеспечивают настройку системы.
Устройство работает следующим образом.
между собой. Равновесие в .гидроусилителях 5 и 6 наступает при равенстве давлений в камерах управления Ei, FZ, и EZ, FZ соответственно в полостях Ci И Cz ГИДр01ЦИЛИНДр10В / и
2, соединенных с гидроусилителя1ми выходными каналами Xi и К.. Подвижный узел уравновешен, вследствие равенства давлений в полостях Ci н СЕ гидр о цилиндров. При нарушении равновесия, HanipHMep, из-за смещения
центра тижести гвлево И мпульс от датчиков 7-10 подается на регулятор 4, и золотник регуллтара 4 начинает перемещаться влево, давление в камерах Ei, Ki, Ci увеличивается по сравнению с давлением в камерах EZ, Кг, CzУсилие в гидроцилиндре 1 увеличивается, а в гидроцнлн1идре 2 уменьшается, ч,пго приводит к устранению пере.коса узла.
Предмет изобретения
Устройство для уравновешивания подвижного узла, перемещаемо1го по направляющим неподвижного узла, содержащее не (Менее двух гидроцилиндров, связывающих подвижный узел с неподвижным, и гидравлический регулятор управления, отличающееся тем, что, с целью обеспечения более высокой точности уравновешивания подвиж1Н.ого узла, гидравлический регулятор соединен по -крайней мере с двумя паралле.пьно подключенными датчиками, установленными «а подвижно-м узле по диагонали к направляющим нелодсвижного
узла и измеряющими изменение зазора в на правляющих.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПОЛОСЫ ПРИ ПРОКАТКЕ | 1972 |
|
SU425685A1 |
| Способ управления системой последовательно установленных, по крайней мере, двух цилиндров и устройство для его осуществления | 1977 |
|
SU665788A3 |
| ГИДРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯУРАВНОВЕШИВАНИЯ ПОДВИЖНЫХ УЗЛОВМЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1971 |
|
SU420408A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Устройство уравновешивания вертикально подвижного узла металлорежущего станка | 1982 |
|
SU1071389A1 |
| ДИНАМИЧЕСКИЙ СТЕНД АВИАЦИОННОГО ТРЕНАЖЕРА | 2011 |
|
RU2486600C1 |
| Гидравлическое нажимное устройство | 1980 |
|
SU937068A1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| ШЛИФОВАЛЬНЫЙ СТАНОК | 1991 |
|
RU2047474C1 |
| Ротационная поршневая машина | 1988 |
|
SU1748659A3 |
t- r--if--J
f IL1J-
12
г1
if
