Изобретение относится к области автоматического управления, а конкретно к системам управления многостепенными динамическими стендами, содержащими в своем составе несколько следящих систем, каждая из которых управляет одним исполнительным механизмом, например исполнительными силовыми гидроцилиндрами, управляющими подвижной платформой динамического стенда в составе авиационного тренажера, работающего в комплексе полунатурного моделирования условий полета при тренировках и обучении экипажей самолетов.
Известны динамические стенды в составе комплексных тренажеров самолетов и вертолетов (КТС, КТВ) [1], предназначенные для имитации акселерационных эффектов, содержащие подвижную платформу с полезной нагрузкой, управляемую силовыми двухполостными гидроцилиндрами. Шток каждого цилиндра соединен с датчиком положения для измерения длины его выдвижения и совместно с гидроусилителем, сумматором, усилителем мощности образует следящую систему, управляющую входным задающим сигналом, поступающим из системы управления тренажером, обеспечивающим разложение управляющих сигналов по координатам, соответствующим каждому силовому гидроцилиндру.
Одним из главных условий качественной работы комплекса приводов динамического стенда, обеспечивающих имитацию движения реального объекта, является равенство частотных характеристик приводов и их реакций на управляющие и возмущающие воздействия. Условие обязательного равенства переходных процессов приводов осложняется тем, что на каждый привод динамического стенда при имитации движения реального объекта действуют переменные динамические нагрузки, обусловленные весом платформы с полезной нагрузкой. Так как при движении вниз сила веса подвижных частей складывается с формируемой гидроприводом силой, а при движении вверх противодействует ей, создается асимметрия механической характеристики привода, приводящая к искажению процесса отслеживания входных электрических сигналов. Особенно этот недостаток проявляется при отработке высокочастотного входного сигнала.
Существенное улучшение характеристик приводов и выравнивание параметров переходных процессов при движении штоков силовых гидроцилиндров вверх и вниз можно получить за счет увеличения мощности и усилия приводов. Однако увеличение мощности и конструктивных размеров приводит к росту стоимости динамического стенда пропорционально кубу отношения увеличения конструктивных размеров и мощности, поэтому увеличение мощности гидроприводов приводит к резкому увеличению стоимости всего тренажера и к тому же не обеспечивает полностью выравнивания переходных процессов при возвратно-поступательном движении штоков силовых гидроцилиндров.
Наиболее близким к предлагаемому изобретению по технической сущности является известный динамический стенд авиационного тренажера [2], содержащий подвижную платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы на базе трехполостных исполнительных гидроцилиндров, которые имеют две рабочие полости, задающие движение штока гидроцилиндра, и одну компенсационную полость, предназначенную для уравновешивания статической нагрузки от веса подвижных частей стенда при поддержании необходимого давления в этой полости. Каждый гидропривод имеет электрический вход управления и состоит из последовательно соединенных датчика положения, сумматора, усилителя мощности, гидроусилителя и силового трехполостного гидроцилиндра. Электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания подключен ко второму входу гидроусилителя, а вход датчика положения связан со штоком гидроцилиндра.
Для достижения равенства переходных процессов при возвратно-поступательном движении штока силового гидроцилиндра в структуру каждого гидропривода включено устройство для поддержания постоянства давления в компенсационной полости, состоящее из последовательно соединенных датчика давления, сумматора, усилителя мощности, гидроусилителя и компенсационной полости силового трехполостного гидроцилиндра. Выход источника опорного напряжения подключен ко второму входу сумматора, второй вход гидроусилителя по магистралям нагнетания и слива подсоединен к источнику гидропитания, а датчик давления и компенсационная полость подключены к выходу гидроусилителя.
При статических и небольших динамических изменениях моментов неуравновешенности нагрузки введение вышеуказанного устройства в структуру каждого гидропривода обеспечивает компенсацию влияния действующей на шток каждого силового гидроцилиндра неуравновешенности, обусловленной весом платформы и полезной нагрузки. Такой характер изменения неуравновешенности нагрузки, действующей на каждый гидропривод динамического стенда, наблюдается в основном при имитации движения маломаневренных реальных объектов, например тяжелых самолетов, предназначенных для перевозки грузов.
Недостатком данного устройства является наличие пиковых забросов давления в компенсационных полостях при отработке стендом знакопеременных перемещений большой интенсивности, ведущее к погрешности воспроизведения акселерационной информации. Кроме того, для стабилизации давления в компенсационной полости гидроцилиндра требуется большой расход рабочей жидкости, а это в свою очередь требует значительного потребления электроэнергии динамическим стендом.
Недостатком известного стенда [2] является то, что при имитации движений быстро-переходных процессов штоки гидроцилиндров достигают больших скоростей, для чего требуются большие расходы рабочей жидкости от источника гидропитания для пополнения компенсационной полости, либо непроизводительного слива при изменении движения штока гидроцилиндра. Большие пиковые расходы рабочей жидкости увеличивают потери давления в подводимых магистралях, соединительных узлах, ухудшается работа устройства по стабилизации давления в компенсационной полости, возникают пульсации давления.
Поэтому при имитации движений маневренных реальных объектов, например летательных аппаратов, выполняющих сложное маневрирование и фигуры высшего пилотажа, возникают значительные динамические изменения моментов неуравновешенности нагрузки, при которых не обеспечивается синхронность работы гидроприводов, что приводит к снижению точности воспроизведения стендом управляющих воздействий и, в конечном итоге, снижению качества имитации движений реального объекта.
Следует также отметить, что конструкция трехполостного гидроцилиндра такова, что при равенстве двух рабочих полостей (как того требует создание приводов с симметричной механической характеристикой) третья компенсационная полость почти в три раза больше рабочей. Поэтому для такой конструкции стенда требуются многократные энергетические затраты при некотором улучшении качества имитации движений.
Техническим результатом предлагаемого изобретения является повышение точности воспроизведения стендом управляющих воздействий посредством обеспечения равенства переходных процессов следящих приводов динамического стенда при значительных динамических изменениях действующих нагрузок на каждый из приводов при движении платформы вверх или вниз, упрощение конструкции и значительное сокращение энергопотребления.
Это достигается тем, что в динамическом стенде, содержащем подвижную платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных датчика положения, сумматора, усилителя мощности, гидроусилителя и силового трехполостного гидроцилиндра, шарнирно связанного с подвижной платформой и основанием стенда, причем электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания по магистралям нагнетания и слива подключен ко второму входу гидроусилителя, а вход датчика положения связан со штоком гидроцилиндра, введена одна общая система стабилизации давления, подаваемого одновременно во все компенсационные полости гидроцилиндров, состоящая из последовательно соединенных датчика давления, сумматора, усилителя мощности, гидроусилителя, выход которого соединен со входом датчика давления, гидроаккумулятора, предохранительного клапана и всеми компенсационными полостями гидроцилиндров, второй вход гидроусилителя по магистралям нагнетания и слива подсоединен к источнику гидропитания, а второй вход сумматора подключен к выходу источника опорного напряжения.
На фигуре 1 приведена функциональная схема следящих электрогидроприводов предлагаемого динамического стенда.
Динамический стенд (фигура 1) состоит из подвижной платформы 1, источника гидропитания 2 и нескольких одинаковых следящих приводов, определяемых по количеству силовых гидроцилиндров, на которые опирается платформа 1. Для упрощения на фигуре 1 изображены три следящих привода, обозначенных позициями соответственно 3, 4 и 5. Каждый из приводов имеет электрический вход управления (Uвх1, Uвх2, Uвх3) и состоит из последовательно соединенных датчика положения 6, сумматора 7, усилителя мощности 8, гидроусилителя 9 и силового трехполостного гидроцилиндра 10, шарнирно связанного штоком и корпусом соответственно с платформой и фундаментом, причем электрический вход управления Uвх1 подключен ко второму входу сумматора 7, второй вход гидроусилителя 9 по магистралям нагнетания и слива подключен к источнику гидропитания 2, а вход датчика положения 6 механически связан со штоком гидроцилиндра 10.
В предлагаемый динамический стенд введена общая система стабилизации давления 11, подаваемого одновременно во все компенсационные полости гидроцилиндров следящих электрогидроприводов 3, 4 и 5, состоящая из последовательно соединенных датчика давления 12, сумматора 13, усилителя мощности 14, гидроусилителя 15, вход которого соединен с входами датчика давления 12, гидроаккумулятора 16, предохранительного клапана 17 и всеми компенсационными полостями гидроцилиндров следящих электрогидроприводов 3, 4 и 5, второй вход гидроусилителя 15 по магистралям слива и нагнетания подсоединен к источнику гидропитания 2, а второй вход сумматора 13 подключен к выходу источника 18 опорного напряжения.
Динамический стенд работает следующим образом.
Гидроприводы 3, 4, 5, каждый из которых состоит из датчика положения 6, сумматора 7, усилителя мощности 8, гидроусилителя 9 и трехполостного исполнительного гидроцилиндра 10, образуют следящую систему, подключенную к источнику гидропитания 2, управляемую входным задающим сигналом Uвх1, который поступает из системы управления тренажером, обеспечивающей разложение управляющих сигналов по координатам, соответствующим каждому исполнительному гидроцилиндру 10.
При работе гидроприводов 3, 4, 5 на штоки гидроцилиндров 10, шарнирно соединенных с подвижной платформой 1 и размещенным на ней полезным грузом, действуют переменные динамические нагрузки, обусловленные весом всех подвижных частей стенда. При движении вниз сила веса подвижных частей складывается с формируемой гидроприводом силой, а при движении вверх противодействует ей, создается асимметрия механической характеристики привода, приводящая, в конечном счете, к искажению процесса отслеживания входных электрических сигналов. Особенно этот недостаток проявляется при отработке высокочастотного сигнала и быстро-переходных процессов.
Для достижения равенства переходных процессов при возвратно-поступательном движении штоков исполнительных трехполостных гидроцилиндров в структуру динамического стенда введена единая система 11 для стабилизации давления рабочей жидкости, подаваемой одновременно во все объединенные компенсационные полости гидроцилиндров 10, состоящая из датчика давления 12, сумматора 13, источника опорного напряжения 18, усилителя мощности 14 и гидроусилителя 15, к выходу которого подключены приемные полости датчика давления 12, гидроаккумулятора 16, предохранительного клапана 17 и компенсационная полость гидроцилиндра 10, а гидравлический вход гидроусилителя 15 подключен к источнику гидропитания 2.
Все составные части этой системы образуют систему автоматического регулирования по поддержанию постоянного давления в компенсационных полостях гидроцилиндров 10. Это давление создает усилие на выдвижение штока и компенсирует нагрузку, приходящуюся на шток отвеса подвижных частей стенда. В этом случае силовому воздействию гидроприводов противодействует лишь инерционная нагрузка от массы подвижных частей стенда.
Введение системы стабилизации общего компенсационного давления обеспечивает рекуперацию потоков (взаимоперетечку) рабочей жидкости в объединенных компенсационных полостях при разнонаправленных движениях штоков гидроцилиндров, что более чем на порядок уменьшает необходимые расходы рабочей жидкости для подпитки компенсационных полостей, исключая при этом непроизводительный слив рабочей жидкости из компенсационных полостей при противоположных движениях штоков гидроцилиндров, что приводит к значительному снижению энергозатрат.
Незначительный расход рабочей жидкости в компенсационных полостях позволяет поддерживать постоянное давление на стабильно высоком уровне, что обеспечивает достижение равенства переходных процессов при возвратно-поступательных перемещениях приводных устройств и тем самым повышает точность воспроизведения стендом управляющих воздействий, значительно снижая энергопотребление и упрощая конструкцию стенда в целом.
Для улучшения работы предлагаемого динамического стенда необходимо более равномерно распределить вес подвижных частей на штоке гидроцилиндров ввиду использования общей системы стабилизации давления в компенсационных полостях. Следует учитывать, что наибольший эффект от применения такой системы стабилизации давлений получается при угловых движениях платформы с разнонаправленными движениями штоков гидроцилиндров, такие движения в основном превалируют на летательных аппаратах (самолетах, вертолетах), танках и особенно при имитации движения плавающих объектов, таких как катера на воздушных подушках, гидросамолетах, самолетах-амфибиях, вертолетах и др. [3].
Для уменьшения пульсации и несанкционированных пиковых давлений в компенсационных полостях к ним подключены гидроаккумулятор 16 и предохранительный клапан 17.
Техническая реализация заявленного устройства:
- гидроцилиндры - моделей ПГУ или ПГМ-01 74999.274.00.000 ТУ;
- гидроаккумулятор - моделей АПГ-Б-10/20 ТУ2-053-1782-66 или А5579-0 ТУ;
- предохранительный клапан - РД14-00-1 СТУ-РД14-75;
- гидроусилитель - моделей ГСП УЭГ.С-200л С4 ТУ25-02.5520051-80 или
- АУ38Б АУ38Б.000ТУ;
- источник гидропитания - станция гидронасосная «Волна» АО312-0000 А ТУ;
- датчик положения - магнитострикционный датчик линейных перемещений ДЛП-1000 672.30.782 ТУ;
- сумматор - операционный усилитель КР140 УД20А бКО.347.182 ТУ2 с масштабными резисторами типа С2-29 ОЖО.467.099 ТУ;
- источник опорного напряжения - операционный усилитель 140 УД20А бКО.347.182 ТУ2;
- усилитель мощности - серии УПТ-100.
Других технических решений, обеспечивающих компенсацию влияния динамической составляющей, действующей на силовой цилиндр неуравновешенности, обусловленной весом платформы с полезной нагрузкой при изменении величин перемещений штоков всех силовых гидроцилиндров динамического стенда, в патентной и научно-технической литературе не обнаружено, что позволяет сделать вывод о соответствии заявляемого изобретения критерию «изобретательский уровень» и что оно является усовершенствованием устройства по а.с. №77429 [2].
Внедрение предлагаемого изобретения повысит точность воспроизведения стендом управляющих воздействий, значительно снизит энергопотребление и упростит конструкцию стенда в целом.
Источники информации
1. Эскизно-технические проекты КТС Ту-154Б, КТС Ил-42, КТС Ту-160, КТС Ил-96-300, КТВ Ми-24 (аналоги).
2. А.с. СССР №77429 от 18.02.74 г. (прототип).
3. А.с. СССР №95052 от 07.04.76 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ СТЕНД | 2005 |
|
RU2285959C2 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2004 |
|
RU2259597C1 |
| Стенд для динамических испытаний гидропривода подач станков с числовым программным управлением | 1984 |
|
SU1190097A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД | 2001 |
|
RU2212576C2 |
| Следящий гидропривод | 1982 |
|
SU1097517A1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| Гидравлический привод | 1981 |
|
SU1059286A1 |
Изобретение относится к динамическому стенду авиационного тренажера. Динамический стенд авиационного тренажера содержит подвижную платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных датчика положения, сумматора, усилителя мощности, гидроусилителя и исполнительного трехполостного гидроцилиндра, шарнирно связанного с платформой и фундаментом через шток и корпус соответственно. Электрический вход управления подключен ко второму входу сумматора, гидравлический вход гидроусилителя по магистралям нагнетания и слива подсоединен к источнику гидропитания, а вход датчика положения механически связан со штоком гидроцилиндра. Динамический стенд содержит также единую для всех компенсационных полостей гидроцилиндров систему стабилизации давления рабочей жидкости, состоящую из последовательно соединенных датчика давления, сумматора, усилителя мощности, гидроусилителя, выход которого соединен со входами датчика давления, гидроаккумулятора, предохранительного клапана и всеми компенсационными полостями. Гидравлический вход гидроусилителя по магистралям слива и нагнетания подсоединен к источнику гидропитания, а второй вход сумматора подключен к выходу источника опорного напряжения. В результате повышается точность воспроизведения стендом управляющих воздействий, упрощается конструкция стенда, снижается энергопотребление. 1 ил.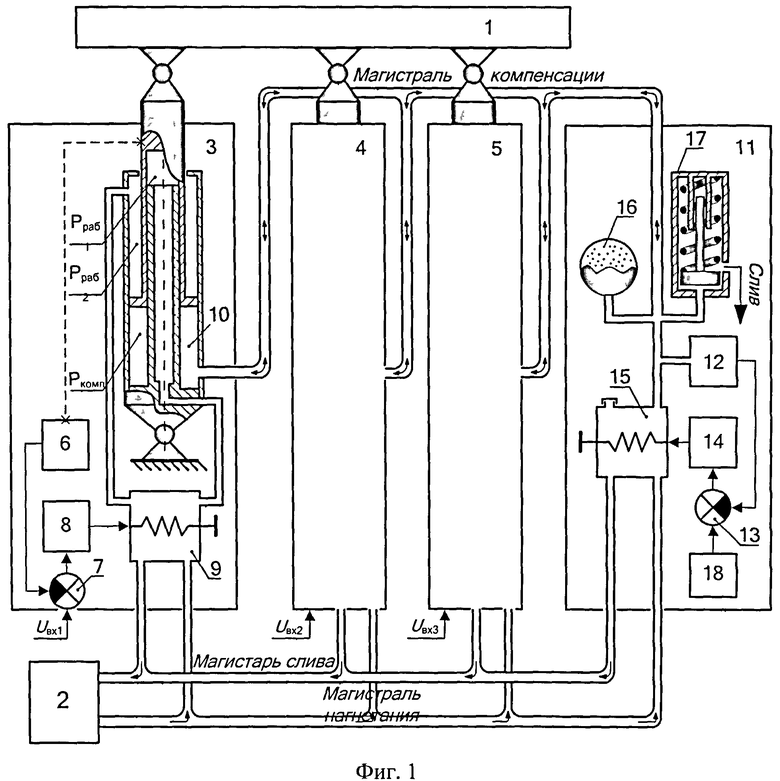
Динамический стенд авиационного тренажера, содержащий подвижную платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных датчика положения, сумматора, усилителя мощности, гидроусилителя и исполнительного трехполостного гидроцилиндра, шарнирно связанного с платформой и фундаментом через шток и корпус соответственно, причем электрический вход управления подключен ко второму входу сумматора, гидравлический вход гидроусилителя по магистралям нагнетания и слива подсоединен к источнику гидропитания, а вход датчика положения механически связан со штоком гидроцилиндра, отличающийся тем, что в него введена единая для всех компенсационных полостей гидроцилиндров система стабилизации давления рабочей жидкости, состоящая из последовательно соединенных датчика давления, сумматора, усилителя мощности, гидроусилителя, выход которого соединен со входами датчика давления, гидроаккумулятора, предохранительного клапана и всеми компенсационными полостями, гидравлический вход гидроусилителя по магистралям слива и нагнетания подсоединен к источнику гидропитания, а второй вход сумматора подключен к выходу источника опорного напряжения.
| СПОСОБ ПРОГНОЗИРОВАНИЯ ТЯЖЕСТИ ТЕЧЕНИЯ ИНФЕКЦИОННЫХ ЗАБОЛЕВАНИЙ РОТОГЛОТКИ У ДЕТЕЙ | 2002 |
|
RU2231073C1 |
| Способ повышения эффективности фильтрации газов | 1957 |
|
SU109894A1 |
| CN 201674627 U, 15.12.2010 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |

