Изобретение относится к области синхронизированного электропривода, содержащего несколько бесконтактных двигателей постоянного тока (БДПТ) и может быть .использовано для синхронного вращения нескольких валов в широком диапазоне изменения нагрузки.
Известен многодвигательный электропривод, синхронизация скорости вращения валов в котором достигается синхронизацией скорости вращения каждого вентильного электродвигателя.
Недостатками такого многодвигательного привода являются сложность схемы управления и возможность выпадения из синхронизма одного из двигателей при моменте нагрузки выше опрокидывающего.
Цель изобретения - упрощение электропривода и повышение надежности синхронизации вращения валов.
Цель достигается подключением выхода датчика положения ротора каждого электродвигателя к полупроводниковому коммутатору последующего электродвигателя по кольцевой схеме, что позволяет регулировать (стабилизировать) скорость синхронно вращающихся валов.
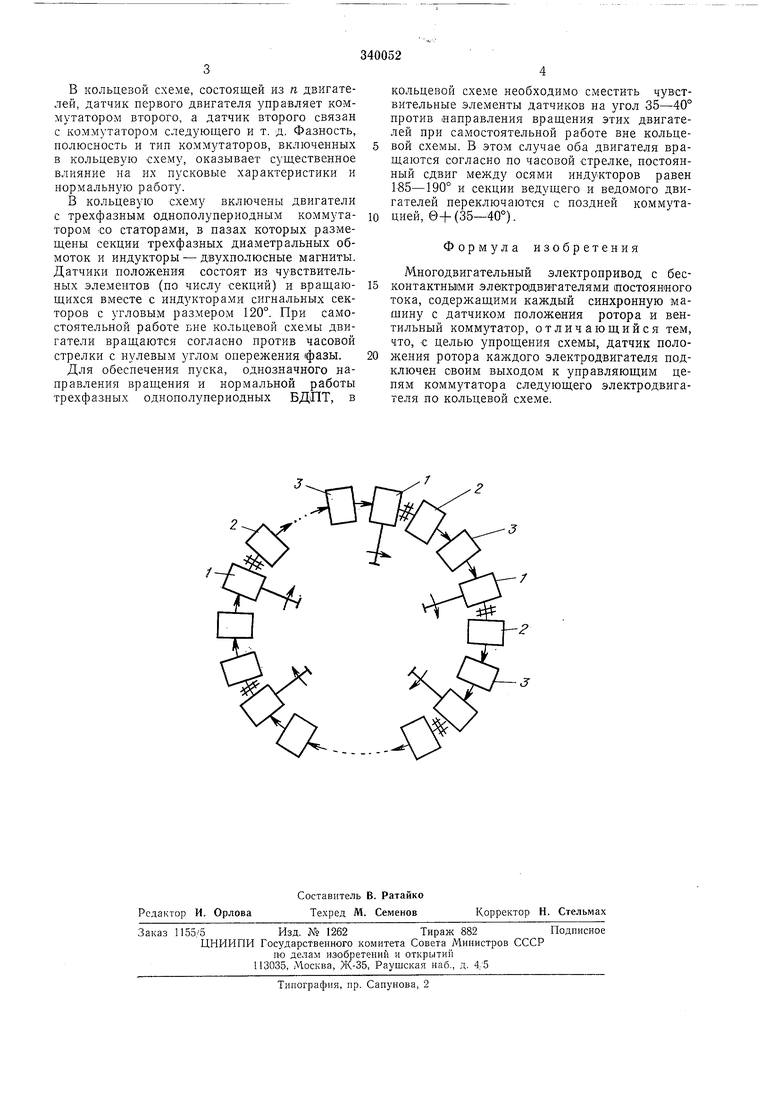
Приводные двигатели представляют собой синхронные многофазные машины 1, на валу каждой из которых установлены датчики 2 положений ротора. Каждой синхронной машиной управляет полупроводниковый коммутатор 3. Для обеспечения синхронного вращения датчик положения ротора каждой синхронной машины подключен к полупроводниковому коммутатору последующей синхронной машины, образуя кольцевую схему.
В кольцевую схему возможно включение БДПТ, различных по мощности, скорости вращения, фазности, типу ППК и ДПР. При этом в электроприводе устанавливается такая синхронная скорость вращения, которая соответствует минимальной скорости вращения любого из БДПТ с фиксированным моментом нагрузки при самостоятельной работе вне кольцевой схемы. Для обеспечения лучших энергетических показателей для синхронизированного электропривода в целом желательно включение -в кольцевую схему БДПТ, имеющих примерно равные скорости вращения.
Если в кольцевую схему включены синхронные машины с различным числом фаз или при равном числе фаз управляемые от различных ППК, то на валу синхронной машины устанавливают датчик с числом выходных каналов, соответствующим числу силовых ключей соединенного с ним коммутатора.
В кольцевой схеме, состоящей из п двигателей, датчик первого двигателя управляет коммутатором второго, а датчик второго связан с коммутатором следующего и т. д. Фазность, полюсность и тип коммутаторов, включенных в кольцевую схему, оказывает существенное влияние на их пусковые характеристики и нормальную работу.
В кольцевую схему включены двигатели с трехфазным однополупериодным коммутатором €0 статорами, в пазах которых размещены секции трехфазных диаметральных обмоток и индукторы - двухполюсные магниты. Датчики положения состоят из чувствительных элементов (по числу секций) и вращающихся вместе с индукторами сигнальных секторов с угловым размером 120°. При самостоятельной работе вне кольцевой схемы двигатели вращаются согласно против часовой стрелки с нулевым углом опережения фазы.
Для обеспечения пуска, однозначного направления вращения и нормальной работы трехфазных однополупериодных БДПТ, в
кольцевой схеме необходимо сместить чувствительные элементы датчиков на угол 35-40° против направления вращения этих двигателей при самостоятельной работе вне кольцевой схемы. В этом случае оба двигателя вращаются согласно по часовой стрелке, постоянный сдвиг между осями индукторов равен 185-190° и секции ведущего и ведомого двигателей переключаются с поздней коммутацией, в+(35-40°).
Формула изобретения
Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока, содержащими каждый синхронную машину с датчиком положения ротора и вентильный коммутатор, отличающийся тем, что, с целью упрощения схемы, датчик положения ротора каждого электродвигателя подключен своим выходом к управляющим цепям коммутатора следующего электродвигателя по кольцевой схеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Вентильный электродвигатель | 1990 |
|
SU1791924A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1972 |
|
SU468346A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Способ управления многодвигательным электроприводом | 1978 |
|
SU769696A1 |
| Бесколлекторный синхронизированный электродвигатель постоянного тока | 1968 |
|
SU304892A1 |
| Многодвигательный электропривод для механизмов с синхронным вращением | 1985 |
|
SU1387160A1 |
| Бесконтактная электрическая машина постоянного тока (ее варианты) | 1985 |
|
SU1274081A1 |
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ШАХТНОГО ПОДЪЕМНИКА | 2018 |
|
RU2704387C2 |
