1
Изобретение относится к электротехнике, а именно к области автоматизированного электропривода, в частности к многодвигательному электроприводу с синхронным перемещением механически не связанных подвижных частей электродвигателей.
Известен способ управления многодвигательным электроприводом с синхронно вращающимися электродвигателями, согласно которому выявляют отстающий по направлению движения электродвигатель и по сигналам датчика положения роста этого электродвигателя управляют общим для всех электродвигателей коммутатором 1. Сиихроиное вращение электродвигателей обеспечивается за счет того, что для менее нагруженных электродвигателей устанавливается поздняя коммутация, что приводит к снижению вращающего момента на этих электродвигателях.
Недостатком такого способа является низкая устойчивость электропривода при возмущающих воздействиях. Это вызвано тем, что из-за приема нагрузки одним из электродвигателей на другом электродвигателе не обеспечивается эффективное снижение вращающего момента. Это приводит к значительным угловым рассогласованиям и в ряде случаев к нарушению синхронного вращения электродвигателей.
Наиболее близким по технической сущности к предложенному способу является способ управления многодвигательным электроприводом с синхронно движущимися индукторами электродвигателей, содержащими каждый индуктор и управляемый коммутатор, связанный с якорной обмоткой синхронной мащины 2. Синхронное вращение электродвигателей обеспечивается
10 за счет того, что измеряют величину пространственного рассогласования между индуктором каждого электродвигателя и индуктором отстающего по направлению вращения электродвигателя и создают на
15 каждом опережающем электродвигателе движущий момент, величина которого обратно пропорциональна измеренной величине пространственного рассогласования. Недостатком такого способа является
20 низкая устойчивость электропривода при возмущающих воздействиях. Это обусловлено неэффективным снижением вращающего момента на опережающих электродвигателях, что приводит к значительным
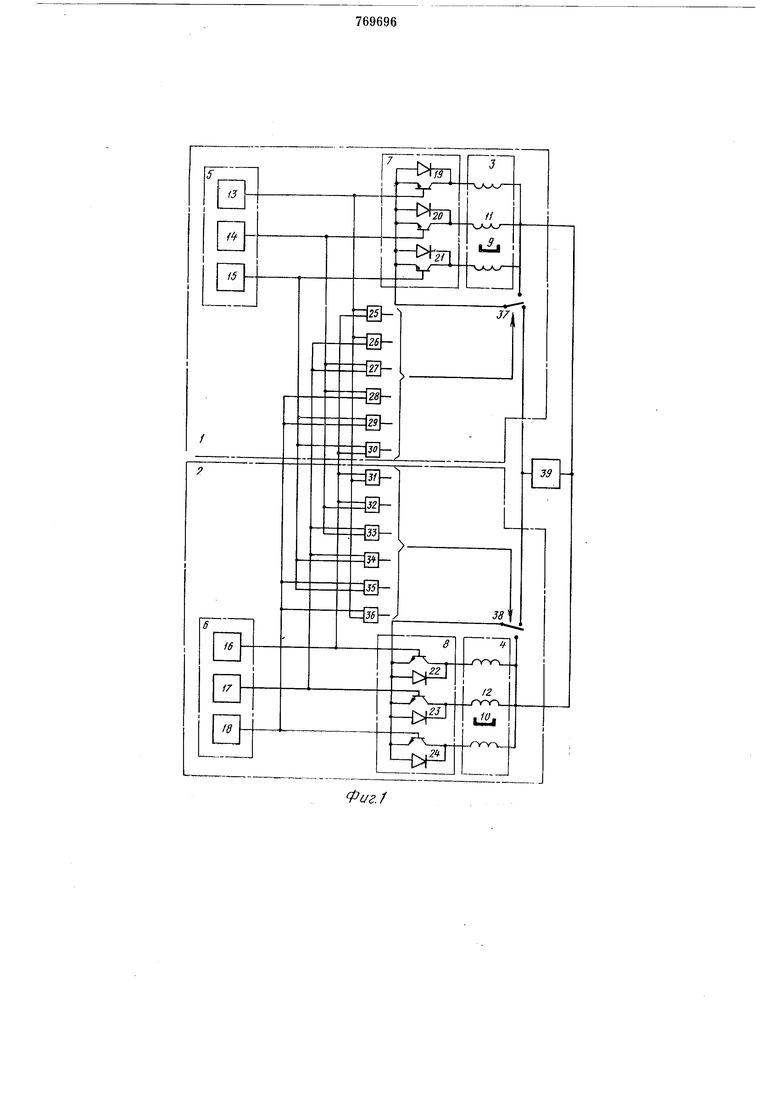
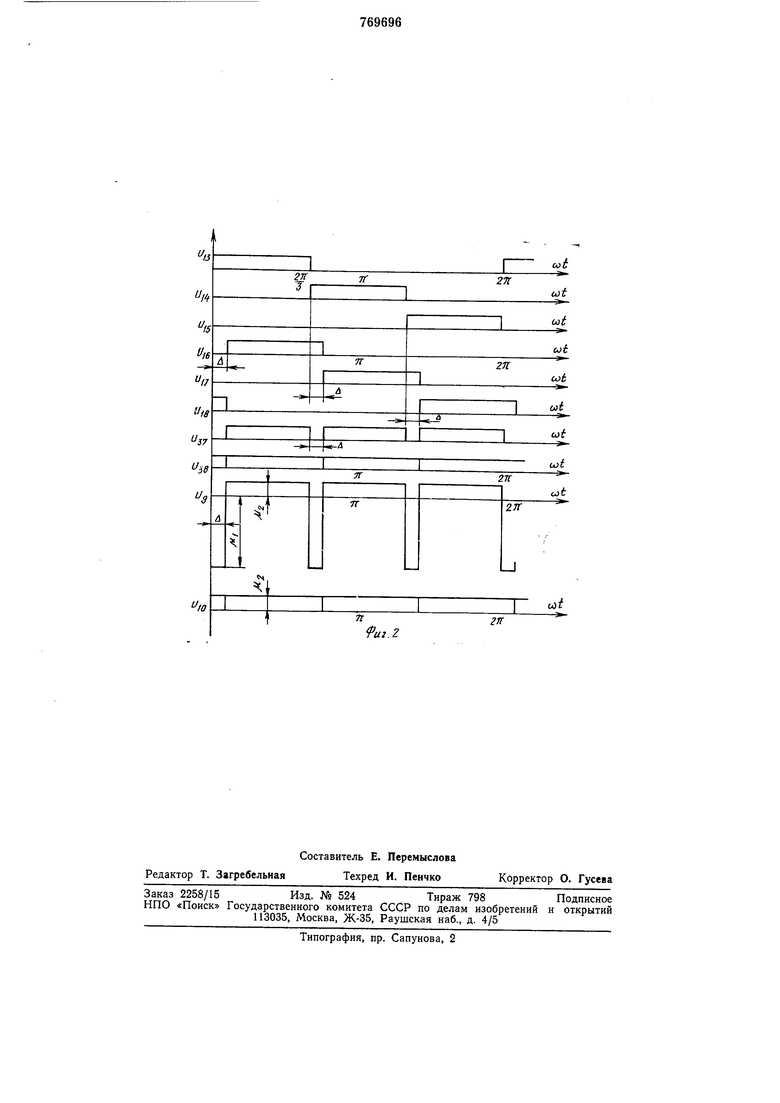
25 величинам пространственных рассогласований между синхронно вращающимися электродвигателями, длительному времени переходного процесса и в ряде случаев к нарущению синхронного вращения элек30 тродвигателей. Цель изобретения - повышеиие устойчивости и у1меньшение времени переходного процесса при возмущающих воздействиях в электроприводе. Это достигается тем, что согласно пред- 5 ложенному способу управления многодвигательным электроприводом с синхронно движущимися индукторами электродвигателей, содерл ащими каждый индуктор и управляемый коммутатор, связанный с якорной обмоткой синхронной машины, измеряют величину пространственного рассогласования между индуктором каждого электродвигателя и индуктором отстающего по направлению движения электродви- 15 гателя, например, по сигналам одноименных каналов датчиков положения индуктора, создают на каждом электродвигателе движущий момент, величина которого обратно пропорциональна измеренной вели-20 чине пространственного рассогласования, а в интервалы времени, соответствующие измеренным величинам пространственного рассогласования, на каждом электродвигателе изменяют знак движущего момента.25 На фиг. 1 изображена блок-схема двухдвигательного электропривода; на фиг. 2 - кривые напряжений в узлах двухдвигательного электропривода и кривые вращающих моментов электродвигателей.зо Предложенный способ управления может быть реализован, например, в двухдвигательном электроприводе с двумя электродвигателями 1 и 2. Электродвигатели 1 и 2 содержат соответственно син- з5 хронные машины 3 и 4 с многоканальными датчиками 5 и 6 положения индуктора и однополупериодные коммутаторы 7 и 8. Синхронные машины могут быть любого типа, например с магнитоэлектрическим 40 возбуждением, и содержат индукто ры 9 и 10 и якорные обмотки 11 и 12. Датчики положения индуктора могут быть любого типа, например индуктивные с подмагничиванием, и содержат в данном конкрет- 45 ном случае по три чувствительных элемента (канала) 13, 14, 15 и 16, 17, 18 каждый. Коммутаторы могут быть выполнены на любых известных управляемых двухпроводных переключающих приборах (клю- 50 чах), например транзисторах, защунтированных диодами, и содержат в данном конкретном случае по три ключа 19, 20, 21 и 22, 23, 24 каждый. Электродвигатели в данном конкретном случае содержат по 55 шесть двухвходовых логических схем совпадения 25-30 и 31-36 каждый и соответственно по одному дополнительному ключу 37 и 38. Электродвигатели 1 и 2 подключены к источнику электроэнергии 60 любого типа, например к источнику 39 постоянного напряжения. Якорные обмотки 11 и 12 подключены к выходам коммутаторов 7 и 8. Чувствительные элементы 13- 15 и 16-18 датчиков 5 и 6 положения ин- 65 10 дуктора связаны соответственно с цепями управления ключей 19-21 и 22-24 коммутаторов 7 и 8. Каждый дополнительный ключ, например ключ 37, во включенном состоянии подключает коммутатор 7 с якорной обмоткой 11 к источнику 39 постоянного напряжения, в отключенном состоянии закорачивает накоротко общую точку соединенных в звезду секций якорной обмотки и общую точку трех управляемых ключей 19-21. Цепи управления дополнительных ключей 37 и 38 подключены соответственно к выходам схем совпадения 25-30 и 31-36. Схемы совпадения связаны с каналами датчиков 5 и 6 положения индуктора. Эти связи могут быть рассмотрены в пределах двух схем совпадения, например схем 25 и 26, поскольку длядругих пар схем совпадения связи выполнены аналогично по кольцевому закону. Первые входы схем совпадения 25 и 26 подключены к каналу 13 датчика 5 положения индуктора, а вторые входы - к каналам 6 датчика положения индуктора: в схеме совпадения 25 - к одноименному с каналом 13 каналу 16, а в схеме совпадения 26 - к следующему по направлению вращения каналу 17. Предположим, что электродвигатели вращаются синхронно, но несинфазно из-за того, что момент нагрузки Ц2 второго электродвигателя больше, чем момент нагрузки р,1 первого электродвигателя. В этом случае сигналы к каналам Uis, f/u и t/is датчика положения индуктора первого электродвигателя будут опережать сигналы в соответствующих каналах Uie, п и L/is датчика положения индуктора второго электродвигателя на величину пространственного рассогласования А (для вращающихся электродвигателей величина А соответствует угловому рассогласованию). Согласно изобретению указанная величина пространственного рассогласования А между индукторами электродвигателей должна быть измерена. Это измерение в каждых одноименных каналах различных датчиков осуществляется с помощью логических схем 25-36. Уз7 - напряжение в цепи управления дополнительного ключа 37. Паузы между управляющими сигналами соответствуют измеренной величине пространственного рассогласования А. Для второго электродвигателя (Lss) это измерение даст нулевой результат (паузы отсутствуют), поскольку его индуктор отстает от индуктора первого электродвигателя. Затем на каждом электродвигателе необходимо создать движущий момент, величина которого обратно пропорциональна измеренной величине пространственного рассогласования А, и изменить знак движущего момента в интервалах времени, соответствующих указанным А. Для этого
сформированные сигналы t/s и /зз подают в цепи управления дополнительных ключей соответственно первого и второго электродвигателей. Дополнительный ключ первого электродвигателя будет отключаться на интервалы времени, соответствующие измеренным величинам пространственного рассогласования А, и переводить первый электродвигатель на эти иннтервалы времени в режим динамического торможения, что соответствует изменению знака движущего момента. Во включенном состоянии дополнительный ключ подключает первый электродвигатель к источнику питания, обеспечивая движущий момент. Второй электродвигатель будет постоянно подключен к источнику нитания, развивая движущий момент, носкольку его дополнительный ключ отключаться не будет. Кривые С/9 и f/io моментов, развиваемых первым и вторым электродвигателями, показаны для случая, когда сопротивления секций якорной обмотки носят чисто активный характер, а противо-ЭДС на участке коммутации постоянна.
Из кривых f/g и f/10 видно, ЧТО величина движущего момента на электродвигателях обратно пропорциональна величине пространственного рассогласования (чем больще А, тем меньше движущий момент), а тормозной момент создается на интервалах времени, соответствующих измеренным величинам А.
Изменить знак движущего момента электродвигателя можно за счет реверса частоты вращения, например, по цепи питания. Для этого дополнительный управляемый ключ должен осуществлять реверс полярности источника питания. Рассмотренный алгоритм управления дополнительного ключа может быть сохранен и для варианта с реверсом полярности источника питания.
В качестве наиболее эффективного управления электроприводом предлагается динамическое торможение или торможение противовключением.
Минимальное рассогласование позволяет постоянно контролировать синхронное двил епие электродвигателей и осуществлять эффективное торможение разгруженного электродвигателя.
Формула изобретения
Способ управления многодвигательным электроприводом с синхронно движущимися индукторами электродвигателей, содержащими индуктор и управляемый коммутатор, связанный с якорной обмоткой синхронной машины, согласно которому измеряют величину пространственного
рассогласования между индуктором каждого электродвигателя и индуктором отстающего по направлению движения электродвигателя, например, по сигналам одноименных каналов датчиков положения
индуктора и создают на каждом электродвигателе движущий момент, величина которого обратно пропорциональна измеренной величине пространственного рассогласования, отличающийся тем, что,
с целью повышения устойчивости и уменьшения времени переходного процесса при возмущающих воздействиях, в интервалы времени, соответствующие измеренным величинам пространственного рассогласования, на каждом электродвигателе изменяют знак движущего момента.
Источники информации, прпнятые во внимание при экспертизе
1.Авторское свидетельство СССР № 395956, кл. Н 02р 7/68, 1973.
2.Авторское свидетельство СССР по заявке .Nb 2487145/24-07, кл. Н 02 Р 7/68, 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод | 1978 |
|
SU785938A2 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Способ реверсирования частоты вращения многодвигательного электропривода | 1978 |
|
SU792522A1 |
| Многодвигательный электропривод | 1977 |
|
SU692050A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |