(21)3894148/24-07
(22)13.05.85
(46) 07.04.88. Бюл. № 13
(71)Белорусский политехнический институт
(72)В. И. Шафранский, М. М. Олешкевич, А. А. Гоичар и Н. С. Иванов
(53)621.313.323.072.9(088.8)
(56)Авторское свидетельство СССР № 395956, кл. Н 02 Р 7/68, 1971.
(54)МНОГОДВИГАТЕЛЬНБШ ЭЛЕКТРОПРИВОД ДЛЯ МЕХАНИЗМОВ С СИНХРОННЫМ ВРАЩЕНИЕМ
(57)Изобретение относится к электрическим машинам с полупроводниковым коммутатором и может быть использовано для ряда механизмов, например оптико-механических приборов, где требуется два синхронных вращательных движения с регулируемой частотой вращения. Цель изобретения - упрощение электропривода с обеспечением запаса статической устойчивости при изменении нагрузки. Многодвигательный электропривод содержит два или более синхронных двигателя. Двигатели получают питание от общего электронного коммутатора. Датчиком положения ротора снабжен только один двигатель (ведущий), остальные двигатели (ведомые) выбираются из условия, что разность их-критического момента и момента сопротивления больше, чем у первого. 1 ил.
Изобретение относится к электрическим машинам с полупроводниковым коммутатором и может быть использовано для ряда механизмов, например оптико-механических приборов, где требуются два синхронных вращательных движения с регулируемой частотой вращения.
Цель изобретения - упрощение с обеспечением запаса статической устойчивости при изменении нагрузки.
На , чертеже представлена блок-схема электропривода.
Электропривод состоит из двух или более синхронных двигателей, один из которых, ведущий двигатель 11, снабжен датчиком 2 положения ротора, выход которого соединен с входом полупроводникового коммутатора 3, являющимся общим для всех двигателей. Остальные двигатели 12, ведомые, имеют больщую разность критического момента и момента сопротивления, т. е. больщую перегрузочную способность. В частном случае, когда момент сопротивления у всех двигателей одинаковый, критический момент ведомых двигателей 12 больще, чем ведущего М.
Электропривод работает следующим образом.
Ведущий двигатель 11, снабженный датчиком 2 положения ротора, является вентильным двигателем (бесконтактным двигателем постоянного тока). Момент такого двигателя равен
FsinQ MkSinQ,
где С - конструктивный коэффициент; Ф - магнитный поток индуктора; F - м.д.с. обмотки якоря; в - угол между м.д.с. и магнитным потоком;
Mk - критический (максимальный) момент.
У двигателя по сигналам датчика 2 положения ротора коммутатор 3 производит поочередное подключение фаз к источнику питания таким образом, что вср ЭО, поэ0
тому его средний момент, уравновещиваю- щий момент сопротивления Мс, равен критическому, т. е. . Следовательно, двигатель.11 находится на границе статической устойчивости, а его запас статической устойчивости / M Mk-MC O. Так как этот двигатель 11 имеет позиционную обратную связь, осуществляемую через датчик 2 положения ротора, то его работа устойчи ва при появлении возмущающих воздействий.
Для ведомых двигателей |2, не имеющих датчика 2 положения ротора, коммутатор 3 является независимым инвертором, частота которого . irt (Pi.i - число пар
полюсов ведущего двигателя) изменяется в зависимости от частоты л вращения ведущего двигателя 1.1, т. е. эти двигатели работают как обычные синхронные двигатели, питающиеся от источника питания переменной частоты. Так как эти двигатели 1.2 имеют определенный запас статической устойчивости за счет больщей, чем у ведущего двигателя 1.1, разности критического момента и момента сопротивления, то они работают устойчиво, а их частота вра5 щения равна частоте вращения магнитного поля .2 (Pi.2 - число пар полюсов ведомого двигателя 1.2), т. е. они вращаются синхронно с ведущим двигателем 1.1.
Формула изобретения
0 Многодвигательный электропривод для механизмов с синхронным вращением, содержащий два или более синхронных двигателя, питающихся от общего полупроводникового коммутатора, и датчик положения ротора, отличающийся тем, что, с целью
5 упрощения с обеспечением запаса статической устойчивости при изменении нагрузки, датчиком положения ротора снабжен только один двигатель, выход датчика положения соединен с входом коммутатора, а остальные двигатели выбираются из условия, что разность их критического момента и момента сопротивления больще, чем у первого.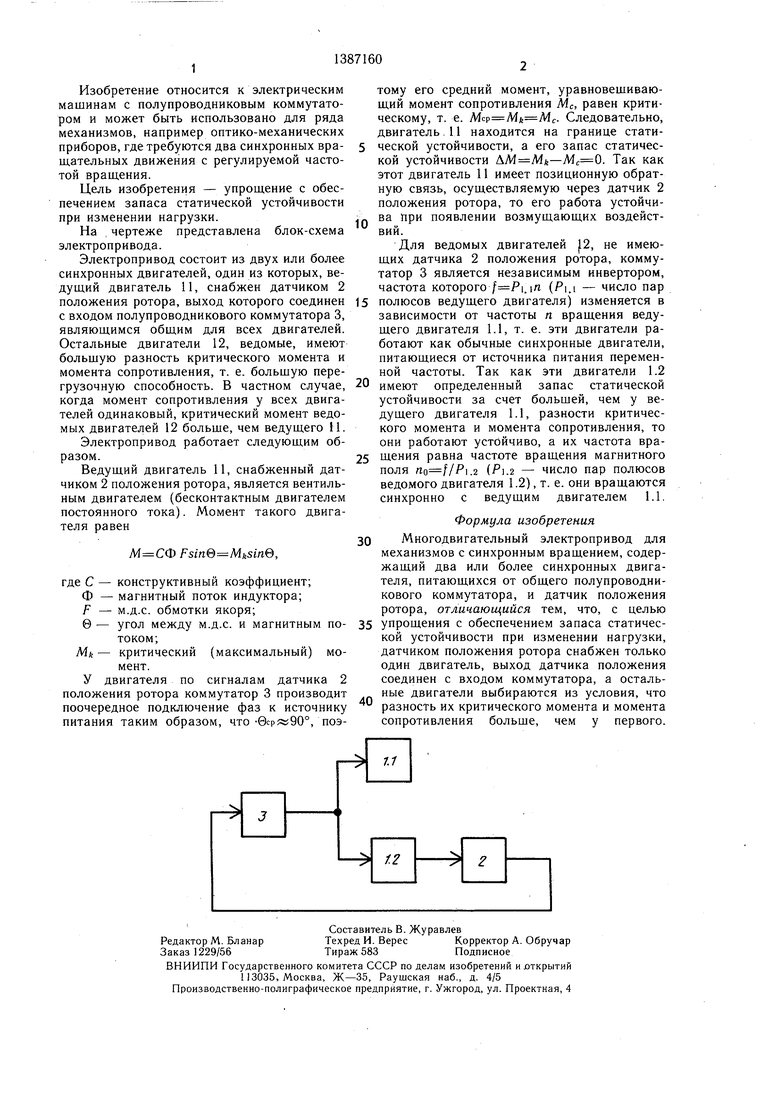
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1986 |
|
SU1410211A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1970 |
|
SU340052A1 |
| Многодвигательный асинхронный электропривод | 1977 |
|
SU699642A1 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД С ЧАСТОТНЫМ | 1973 |
|
SU399992A1 |
| Многодвигательный электропривод поточной линии | 1977 |
|
SU858196A1 |
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| МНОГОДВИГАТЕЛЬНОЕ ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 2012 |
|
RU2513360C1 |