Изобретение относится к устройствам для контроля параметров движения.
Известные устройства для определения отклонения скорости движения от заданной, содержащие переключатели, реле и -источник литаиия, не позволяют точно определить момент отклонения действительной скорости от заданной, особенно в случае, когда контролируемый объект движется с предельной скоростью или близкой к ней; кроме того, такие устройства имеют сложную конструкцию.
В предлагаемом устройстве, с целью упрощения конструкции и повышения точности измерения контролируемого параметра, между полюсами источника питания параллельно включены две электрические цепи, одна из которых выполнена в виде последовательно включенных .первых пар контактов двух переключателей, контактов реле времени и обмоток исполнительного реле, контакты которого включены в схему сигнализации, а вторая цепь - в виде последовательно включенных второй пары контактов одного из переключателей, -параллельно которой включены контакты второй пары другого переключателя, и обмотки управления реле времени, причем подвижный элемент снабжен гребенками, активные части которых кинематически связаны с переключателями и смещены друг относительно друга на заданную величину, обусловленную расстоянием между переключателями.
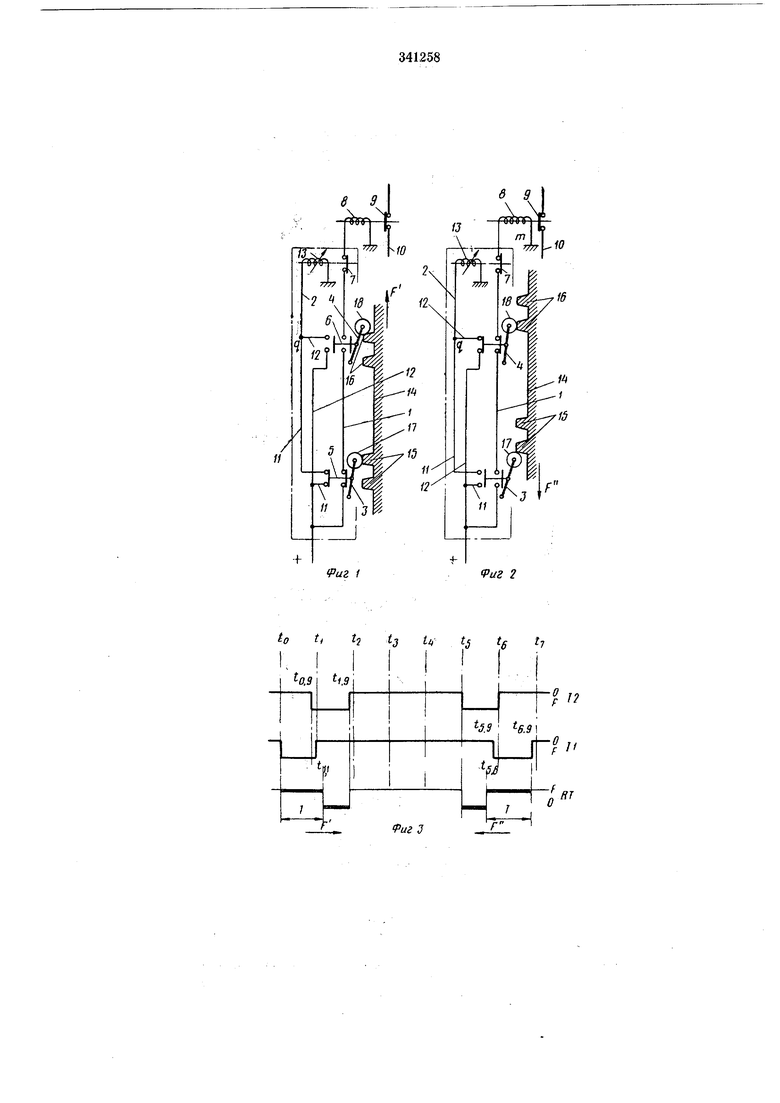
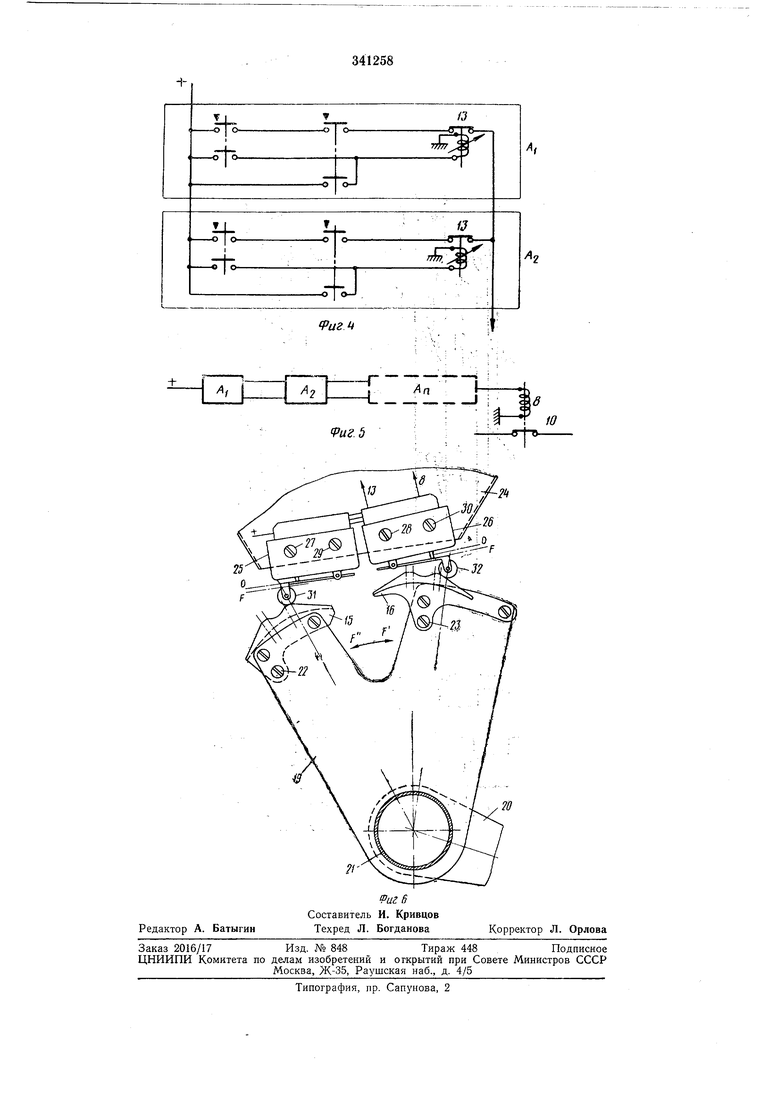
На фиг. 1 и 2 схематично представлен один из возможных вариантов предлагаемого устройства при контроле им возвратно-поступательного движения; на фиг. 3 представлена диаграмма, поясняющая работу этого устройства; на фиг. 4 -схема из двух устройств, аналогичных устройству, показанному на
фиг. 1; на фяг. 5 - схема системы устройств; на фиг. 6 показан предпочтительный ва риант устройства по данному изобретению.
Устройство (см. фиг. 1 и 2) представляет собой электрические цепи 1 ti 2, включенные
параллельно между полюсами источника нитания. Цепь / выполнена в виде последовательно соединен-ных переключателей 5 и со спаренными контактами 5 и 5, контакта 7 реле 8 управления и контакта 9 в контуре 10, причем
отрицательная клемма реле 8 включена на массу т.
Цепь 2 выполнена в виде последовательно включенных ветвей из контуров 11 и 12 смонтированных параллельно, реле 3 времени,положительная клемма которого присоединена к точке q, а отрицательная- к массе т. Цереключатель 3 управляет цепью / и контуром //, а идентичный переключатель 4 - цепью / и
Подвижный элемент 14, связанный- с контролируемым объектом (на фиг. 1 и 2 не показан), снабжен гребенками 15 и 16, совершающими возвратно-поступательное движение с элементом 14 (на фиг. Г и 2 направление движения показано стрелками с индексами F и F). Зубья гребенки 15 через ролик 17 взаимодействуют с переключателем , а зубья гребенки 16 через ролик 18 - с переключателем 4.
Расстояние между первьгми зубьями гребенок 15 и 16 или вторыми зубьями этих гребенок устанавливается в соответствии с перемещением эле.мента 14. При его перемещении в направлении F (см. фиг. 1) первый зуб гребенки ./5, замьшет переключатель .4 раньше, чем первый зуб гребенки 15, разомкнет переключатель 3. Аналогичное действие, но в обратном порядке, будет иметь место при перемещении элемента 14 в направлении F (см. фиг. 2).
От реле 8 срабатывает контакт 9 в контуре 10 при проходе тока в цепи 1, т. е. в случае, когда ои одновременно прерван переключателями 3, 4 и контактом 7. Движение объекта, связанного с элементом 14, зависит от основной цепи. Если она замкнута или разомкнута, движение объекта может продолжаться или прекращаться.
Временное реле 13 при разомкнутой цени / не срабатывает. Подача на него напряжения, обусловленного соответствующим пололсением переключателей относительно контуров // и 12, вызывает размыкание контакта 7. Это размыкание длится до момента истечения времени Т задерл :ки, если цепь контура // или 12 не была замкнута соответствующим переключателем до истечения этого времени. В этих случаях его срабатывание продолжается до появления напряжения на его клеммах, т. е. до тех пор, пока оба переключателя 5 и 4 не будут разомкнуты. Этим выключением напряжения обусловливается их возвращение в нерабочее состояние при замкнутом контакте, 7. -Диаграмма (см. фиг. 3) иллюстрирует работу устройства, представленного на фиг. 1 я 2. Она .показывает времениую последовательность состояний различных элементов устройства. .Для этого полагают, что реле 13 иодгоговлено на размыкание контакта 7: первый раз - в момент , принятый за начало времени .в. направлении F, и во. второй - в момент 1б,ч 6,9; принятый за начало времени в направлении:F. Предполагается, что это реле разм-ыкает цепь / соответственно в моменты 4;9 0,9 в направлении F и /6 6 - в направлении F,
Для удобства изложения полагают, во-перBbjiX;, .- что - ,в .направлении F (или F) смещение подвижного элемента 14 на зад.анное расстояние производится за врегмя.-меньшее, чем -время Т 1,.1 реле 13, т.. е.. скорость элемента 14 выше установленной, предельной скоро.сти и, следовательно, переключатель 4-замыкает цепь 1 и цепь контура /7,..например В: момент о.9 0,9, тогда-как
переключатель 3 замыкает депь / и цепь контура 12 в мо.мент 1 1.
В этих условиях разомкнутое состояние основной цепи обеспечивается в результате одновременного замыкания переключателей 3, 4 и контакта 7 в промел ;утки между о,9 0,9 и it l, когда объект перемещается в направлении F, и в результате одновременного размыкания тех же органов -в промежутки между и /5,) 5,9, когда объект перемещается в направлении F.
Если предположить, что элемент 14 перемещается в направлении F (или F) на ту же заданную длину, что и указанная выше, за время, больщее чем ,1 -реле 13, т. е. со скоростью ниже установленной предельной скорости, то основная цепь остается зам,кнутой, так как переключатель 4 не продолжит возбуждения реле 13 своим замкнутым управляющим контактом; поэтому реле 13 перейдет в разомкнутое состояние. В случае перемещепия объекта в направлении F, если переключатель 4 изменяет свое состояние, переходя от замыкания к размыканию за время больщее, чем длительность времени задержки (/5,,8), основная цепь остается замкнутой, так как переключатель 3 предварительно не продлил возбуждения реле 13 посредством своего закрытого контакта, и, следовательно, реле 13, перейдя в разомкнутое состояние, останется в этом положении.
Таким образом, устройство, показанное на фиг. 1 и 2, позволяет производить контроль скорости возвратно-поступательного движения. Отсюда видно, что регулировка, с одной стороны, времени Т задержки и, с другой стороны,- расстояния между гребенками, расположенными на подвижном элементе 14, позволяет точно определять предельную или критическую скорость смещения этого элемента и обеспечивать автоматическое размыкание основной цени, когда эта критическая скорость достигнута. Разомкнутоесостояние переключателей , .кроме того, приводит реле 13 в его исходное замкнутое, нерабочее положение, в котором оно может быть снова возбуждено.
Описываемое устройство позволяет обнаружить превышение движущимся объектом предельной скорости любыми движущимися органами одной и той же системы, за-висящих или не зависящих друг от друга. Например, два устройства Л и 2 (см. фиг. 4), аналогичные показанному на фиг. I и 2, могут быть смонтированы параллельно на общей цепи. Каждое из этих устройств предназначено для контроля скорости движущего объекта и обеспечивает размыкание общей цепи, когда скорость (постоянная или переменная) контролируемого объекта превы-шает установлен-ный предел. Точно так же (см. фиг. 5), в качестве примера, устройства Ль Лг, ..., Л„, аналогичные устройству, показанному на фиг 1 и 2, смонтированы параллельно основной (общей) цепи. Каждое из этих устройств предназначено для набл-юдёний за скоростью движущегося объекта, входящего в систему из п устройства. Превышение ка.ким-либо одним из них заданного предела скорости приводит к размыкапию общей цепи. Что касается изменен-ий состояния цепей, то очевидно, что они могут быть реализованы любыми соответствующими средствами, на-пример фотоэлементами, не только с помощью гребенок и, чтО, кроме того, электрические -цепи могут быть заменены гидравлическими цепями с соответствующими органами управления. Предпочтительный вариант реализации предлагаемого устройства может быть использован, в частности для управления движением органов автоматической самолетной аппаратуры. Известно, что некоторые аппараты автоматического контроля полета контролируются внешними цепями этих аппаратов, питаемых от независимых от них детекторов, например детекторов угловой скорости, ускорения и т. п. В других аппаратах автоматического контроля полета, наоборот,- наблюдение производится с помощ.ью внутренних цепей этих аппаратов. которые называются «внутренним наблюдением или «автонаблюдениел. Но такое «автонаблюдение, в принципе не перекрывает всю область полетов и иногда может быть недостаточным для некоторых частных фаз полета, например для захода на посадку и автоматической посадки. При этом может возникнуть необходимость продублировать такое наблюдение автономным средством (по соображениям безопасности). Предлагаемое устройство позволяет осущсствлять наблюдение извне, причем это наблюдение может комбинироваться, добавляться или удаляться, полностью или частично, во внутреннюю систему наблюдения для того, чтобы скорость смещения органа управления, которая подлежит контролю, например управление глубиной, эйлеронами или направлением, была бы «видна в пределах одного или нескольких диапазонов отклонений руля как «нормальная или «ненормальная, т. е. ниже некоторой определенной величины или выше этой величины. Для этого служит устройство контроля (см. фиг. 6) в своем предпочтительном варианте. Это устройство содержит опору 19, связанную системой 20 тяг и рычагов управления с валом 21. На опоре 19 укреплены гребенки 15 и 16, регулируемые соответствующими винтами 22 и 23. Эти гребенки приводятся во вращение вокруг оси вала 21, когда система 20 тяг и рычагов сама приходит в движение в направлении F или F. На опоре 24, жестко укрепленной по отношению к летательному аппарату, смонтирован электрический контур (на фиг. 6 не показан), содержащий два переключателя 25 и 26, прикрепленные к опоре 24 соответственно винтами 27 -л 28 с, одной стороны и винтами 29 и 30 - с другой, а также реле 13 задержки вреОЙ цепи (иа фиг. 6 не показана). Этот контур Е- данном случае служит цепью автоматического запуска аппаратуры контроля нолета и анаогичен по своим функциям основной депи (см. фиГ; 1 и 2). Электрическая цепь замыкается или размыкается переключателями 25 и 26 которые запускаются соответственно гребенками 15 и 16 во время их вращения. Эти гребенки расположены но отношению к галетам 31 и 32 указанных переключателей аналогично тому, как в описанном выше устройстве (см. фиг. 1 и 2) расположены гребенки 15 и 16 по отношению к роликам 17 и 18 переключателей и 4. В этих условиях устройство работает подобно описанному устройству. Диаграмма его работы аналогична диаграмме, показанной на фиг. 3. На фиг. 6 в качестве примера показаны (в. угловых единицах) соответствующие расстояния выбранных точек гребенки 15 и 16. Эти значения и положение гребенок (гребенка 15 поддерживает переключатель 25 в разомкнутом положении, а гребенка /5 оставляет переключатель 26 в -замкнутом положении) обеспечивают смещение на 0,9° между за мыканием одного и другого переключателей. Из диаграммы (см. фиг. 3) видно, что, если моменты to, t, ..., 7 на абсциссе выбраны таким образом, что отделяющие их промежуток времени взяты в качестве единицы измерения, будут равномерно разнесены друг от друга на полсекунды и, если промежуток задержки времени Т равен 0,55 сек (последний показан на графике длиной ,1), то угловая скорость системы рычагов и тяги, соответствующая предельной угловой скорости, в этом случае будет равна ° за 0,55 сек. В случае, когда угловая скорость системы рычагов и тяг выше предельной скорости, например 1° в секунду в направлении F, гребенка 15 замыкает электрическую цепь посредством прерывателя 25 в момент /о, в результате чего реле 13 задержки времени срабатывает и размыкает его на 0,55 сек позже, т. е. в момент /1,1 1,1; затем реле замыкается на 0,5 сек позже, т. е. в момент t. Между тем гребенка 16 приводит в действие переключатель 26 для замыкания на 0,45 сек позже о, т. е. при о,,9, и на длительность 0,5 сек, для того, чтобы поддержать это размыкание до момента 1,9 1,9. Очевидно, что за период между го,я 0,9 и 1 1, одновременно размыкаются переключатели 25 п 26 -а реле 13, что необходимо для запуска основной цепи. Картина будет ан алогичной, когда движение происходит с той же скоростью, но в обратном направлении F. Кроме того, когда реле 13, которое нормально запускается при замыкании какого-либо из переключателей (25 или 26), управляемых гребенками 15 и 16, не срабатывает из-за неисправности цепи питания, оно остается в разомкнутом положении размыкания. В результате, какова бы ни была скорость движущеготакая неисправность не снизит иадежность работы.
Рассмотренное устройство предназначено дл-я автоматического контроля полетом. Оно надеишо обеспечивает получение сигнала о ненормальной работе аппаратуры, которая контролирует скорость перемещения того или иносо объекта, или в результате неисправности самого устройства контроля.
Несколько устройств, аналогичных этому устройству, могут быть сгруппированы в комплекс для одновременного контроля за грулпой органов управления полетом летательного аппарата, например направления, глубины и перекоса. Каждое из устройств взаимодействует соответственно с органом управлен-ия. Цепи этих устройств включены в основную цепь ларадлельно и соединены с реле, которое управляет основной -цепью, взаимодействующей с различными элементами на лульте пилота, например с цепью реле запуска автопилота, которое управляется реле устройства при автоматическом полете.
Поскольку указанные устройства комплекса работают аналогично устройства, представленным на фиг. 1 и 2, а их цепи связаны соответственно с цепями органов управления летательного аппарата, то всякое отклонение контролируемого параметра от своего номинала
будет обнаружено и передано в виде, например, оптического сигнала на пульт управления летательного аппарата.
Пред мет изобретения
Устройство для определения отклонения скорости движения от заданной, содержащее переключатели, реле и источник питания, огличающееся тем, что, с целью упрощения конструкции и повышения точности измерения контролируемого параметра, в нем между полюсами источника питания параллельно включены две электрические цепи, одна из которых
выполнена в виде последовательно включенных первых .пар контактов двух переключателей, контактов реле времени и обмоток исполнительного реле, контакты которого включены в схему сигнализации, а вторая депь -в виде
последовательно включенных второй пары контактов одного из переключателей, параллельно которой включены контакты второй пары другого переключателя, и обмотки управления реле времени, причем подвижный элемент снабжен гребенками, активные части которых кинематически связаны с переключателями и смещены друг относительно друга на заданную величину, обусловленную расстоянием между переключателями.
Риг 1
16
Vaz 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кнопочного управления электрическим подъемником | 1936 |
|
SU52517A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| Устройство для автоматического управления электрическим запалом нефтяной или газовой горелки | 1937 |
|
SU52716A1 |
| Устройство для дистанционного управления транспортным комплексом | 1974 |
|
SU553712A1 |
| Способ измерения скорости распространения упругих волн в твердых средах | 1934 |
|
SU40597A1 |
| СХЕМА ВОЗВРАТА В ИСХОДНОЕ СОСТОЯНИЕ ПРЕДОХРАНИТЕЛЬНОЙ ЦЕПИ ЛИФТА | 2008 |
|
RU2478556C2 |
| СПОСОБ СУШКИ БЕЛЬЯ И МАШИНА ДЛЯ ОСУЩЕСТВЛЕНИЯ ТАКОГО СПОСОБА | 2001 |
|
RU2261947C2 |
| Устройство для многоточечного автоматического регулирования и сигнализации отклонений параметров от заданного значения | 1942 |
|
SU83664A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВСПОМОГАТЕЛЬНЫМ НАГРЕВАТЕЛЕМ ДЛЯ ДВИГАТЕЛЯ С ЖИДКОСТНЫМ ОХЛАЖДЕНИЕМ | 1987 |
|
RU2010988C1 |
to tj ij t tg l
0.9 1.9
ta
ful J
