Изобретение относится к области вычислительной техники, а именно к преобразователям числовой информации в код.
Известен линейный интерполятор, содержащий многословный динамический регистр, выход которого соединен через арифметическое устройство с выходным регистром и со вторым входом одного из вентилей, а в.чод - с выходами двух вентилей, первые входы которых соединены с выходом устройства управления, с одним из -входов ариф 1етического устройства и выходного регистр.а, выходы которого подключены ко входу устройства управления. Целью изобретения является разработка быстродействующего линейного интерполятора, частота выдачи выходных сигналов которого не За висит от величины координат.
Эта цель достигается применением линейного инте|рПолято.ра, в котором один из выходов арифметического устройства соединен через .-to по л и ител 1 я о уст ени ы и о д но1сл.ав н ы и динамический регистр с одним из входов арифметического устройк:тва.
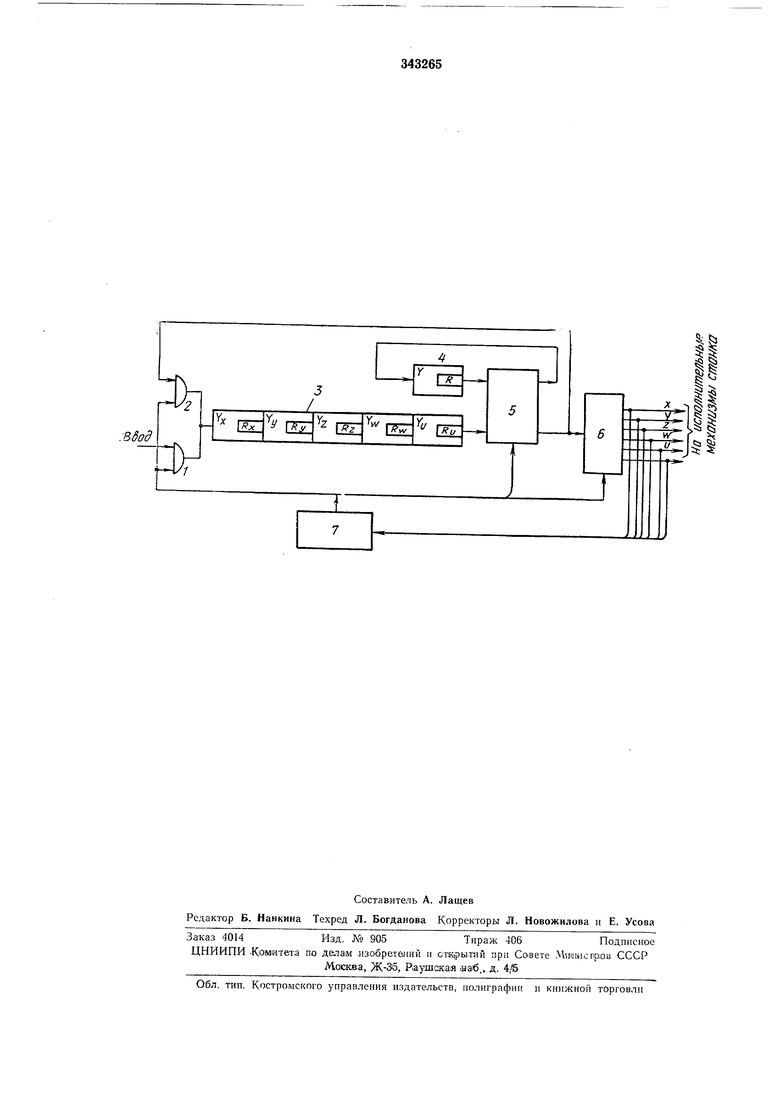
На чертеже представлена блок-схема линейного интерполятора, где 1, 2-вентили; 3-многословный динамический регистр; 4 - однословный динамический регистр; 5 - арифметическое устройство; 6 - выходной регистр; 7-устройство управления.
соединено с выходом многословного динамического реги:стра 3, а 1ВТО|рЫМ -с выходом однословного динамического (регистра 4. Один выход aipифмeтичecкoпo устройства 5 соединен со входом выходного регистра 6 и через .вентиль 2 соединен со входом многословного дииа:мичес.кого регистра 3. Выходы выходного регистра 6 соединены с устройством управления 7, а также со входами исполнительных механизмов станка. Устройство управления 7 азСП:М И вы.чодамн соединано с уп равляющими входами арифметического устройства 5, выходного регистра 6 и входами многословпо-го дЕна мИчecKO.ro .регистра 3 через вентили У и 2. Динамический регистр 3 предназначе-н для ир.иема числовой информации координат и хранения промел уточных значений вычислений в процессе интерполяции. В нем располагаются цифровые интеграто1ры, количество которых определяется числом .коор.динат. Цифровой интегратор содержит два регистра, первый из которых хранит значения координат и называется У-регистром. Для различных координат он обозначается Yx, Уу, У и т. д.
При линейной интерполяции значение У-регистрощ координат в процессе вычислений не изменяется. Второй регистр цифрового интегратора предназначен для хранения остатков величин, которые получаются при последовательном су1ммир:ова,нии значений У-;регистров, а возникающие переполнения являются выходны,ми сигналами инте;р 11олятора по соответствуюЩЕм коордилатам. Этот регистр называется -1рвгИ|СТ|рО|М и обозначается Rx. Ry и т. д. В дин1а1МИчес:ком регистре 3 чередуются разряды У-регистров с разрядами / -регистров, относящихся к одному интегратору, т. е. в нечетных местах динамического регистра 5 раз,мещают ся разряды У регистров, а в четных - разряды -регистров. Например, за .младшим разрядом У;с-регистра следует младший разряд / л:-1реги1стра, затем идет второй разряд Ул:-регистра,а за ним - второй разряд / л:-регистр1а и т. д.
После цвкла сум:мир01вания в цифровом интеграторе, где хранится значение .координаты X, начинается суммирование в цифровом интелраторе, где хранится значение коор.динаты У, за ней - Z и т. д.
Однословный динамический регистр 4 служит для храмения в У-регист ре дополнения к максимальной координате. Арифметическое устройство 5 п.реднаЗиачбно для образования дополнения максимальной координаты, еложения его с величинам« остальных координат, расположенных в У-регистрах, а также сложения полученной суммы с остатками, находящимися в / -регистрах. Кроме того, арифметическое устройство 5 обеспечивает цепи циркуляции динамичесюих регистро.в 5 и 4 для хранения величин, записанных в эти .регистры.
Выходной регистр 6 служит для приема выходиых сигналов координат, следующих последовательно во времени, и распределения их по соответствующим выходным цепям по сиеналам от устройства управления 7. Устройство управления 7 управляет работой отдельных узлов интерполятора и обеспечиваетшх вза.илшдействие согласно алгоритму линейной интерполяции.
Интерполятор работает следующим образом. В начале |работы по сигналам устройства управления 7 производится ввод информации в динамический регистр 3 через вентиль 1. Значения величии координат записываются в У-регистры интеграторов и не изменяются в течение всего вычислительного процесса. Для каждой координаты отведен соответствующий интегратор, поэтому информация записывается только на определенное место в динамическом регистре, при этом максимальной координатой может быть любая. После ввода координат заносится значение м аксимальной координаты в дополнительном коде в У-регистр однословного динамического регистра , а в интегратор максимальной координаты в У-регистр записывается едипица.
В начале вычислений в / -регистры всех иптегратов поступает сумма, состоящая из. донолнения максимальной координаты из однословного регистра 4 - содержимого своего У-регистра. Так как эти две величины размещены в Y-регистрах, то в первом такте складываются их млад1пис разряды в арифметичесгдам
устройстве 5, и их сумма запоминается до прихода младшего разряда / -регистра. Во втором такте производится суммирование этой суммы с младщим разрядом / -регистра и запись результата сложения в младший разряд последнего. В третьем также находится сумма следующ;их разрядов У-регистров п запоминается, а iB четвертом такте она С ум1МИруется со следующим разрядом / -регистра, и результат записывается в -{регистр и т. д.
После О1кон1чан1ия су.М1Мпр01зания з одном цифровом интеграторе начинается такой же цикл для следующего интегратора и т. д.
Получившееся в результате сложения перег олнепл-1е от каждо.го интелратора пост1у:пает на выходной регистр по определенному адресу. При последующих циклах вычислений донолпеНИе максимальной координаты вводится только в цифровые интеграторы тех координат, от которых в предыдущем цикле получены перанолления. Если же от нвтепраторов не были получены переполнения в нредыдущем цикле, то производится сложение только содержимого У- и / -регистров.
В цифровой интегратор максимальной координаты помещен счетчик циклов, при этом в У-регистр цифрового (интегратора помепдается единица, а (В R-periicTp -величина максимальной координаты в дополнительном коде, и в каждом цикле происходит суммирование содержимого / -регистра с единицей У-регистра до получения сигнала переполнения, который является сигналом конца обработки кадра. В этот же момент в каждом цикле устройство управления имитирует переполиение по максимальной координате, которое поступает в выходной регистр 6 но своему адресу. Преобразова ние информации по всем координатам всегда происходит за число циклов, равное максимальной координате.
Сигнал конца обработки кадров передается в выходной регистр 6, затем поступает в устройство управления 7, что является сигналом прекращения вычислений. В интерполятор вводится информацч-1Я нового кадра.
П ip е д м е т iH з о б р е т е .и и я
Линейный интерполятор, содерлсащИЙ многословный динам1ический регистр, выход которого соедииен через арифметическое устройство с выходным регистром и со вторым входом одного из вентилей, а вход - с выходами двух вентилей, первые входы которых соединены с выходом устройства управления, с одним пз входов арифметичеокого устройства и выходного регистра, выходы которого подключены ко входу устройства управления, отличающийся тем, что, с целью увеличения быстродействия работы, в нем один из выходов арифметического устройства соедииен через дополнительно установленный однословный динамический регистр с одним из входов арифметического устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР | 1973 |
|
SU363997A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ КОРНЕВЫХ ГОДОГРАФОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU397914A1 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Круговой интерполятор для контурных систем программного управления станками | 1973 |
|
SU484502A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для управления двухкоординатным шаговым приводом | 1977 |
|
SU736051A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1631518A1 |
| Цифровой линейный интерполятор | 1977 |
|
SU682923A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |