Изобретение относится к области .контурных систем anporpaiMMHoro управления станками, в гкоторых широкое ра-спространвиие получили iKpyrotBbie ,и нтер1поляторы, работающие в Д1воичн.о-десят1ич1ной -системе коднрования, что упрощает согласование интерполятора с устройствами ввода и цифровой яиднкаци/и даяиых. При этом в «екоторых режим-ах об)работки (иаориадер, нарезание 1резьбы ф.резой, диаметр Которой .меньше диаметра окружности отверстия .детали, а цеитр, яе совпадающий с центро м отверстия, движется по экви|диста1нтной окружности) требуется обеспечить (постоянство линей,ной скорости ло контуру.
Интерполяторы, работающие по лринцкпу цифрового дифференциального анализатора (ЦДА), ооеспечивают пастояист1во угловой (лииейной) скорости л выдачу дискрет центрального угла. Угловая частота интерполятора па ЦДА определяется выражением со -
где fnx - входная частота интерполятора, Q - объем Иитеграторов интер.полятора. Для обеопечения нужной линейиой скорости V частота повторения 1ИМпульсов fr, должна иметь определенное значение. При .программировании линейной скорости в IMIM/MMH. для окружностей различных р-адиусав в схеме интерполятора 1следует предусмотреть изменение частоты fax в отнощении
. I
),
где R уакс - Максимальное значение радуса, R; - любое за нрогра1ММИрова«ное значение
ра.диуса.
Диапазон изменения частоты /вх моЖПО уменьшить путем переключения числа работающих триггерных ячеек регист.ров интеграторов, т. е. уменьшения объемов интеграторов
ири малых .радиусах. Обычно изменение объемов производится в Ь раз, где b - основалне сИСтемы Кодирования, в которой работает интерполятор. При этом частота / „ Для значений радиусов, при которых объем интеграторов не меняется (внутри ступени переключеяия объемов, должна плавно увеличиааться от К R,nni В b раз.
Если увеличение частоты Невозможно, то в b раз уменьшается быстродействие пнте)полятора.
Известна схема кругового и-итерполятора для контурных систем програ-ммного управления станка:ми, содержащая интегратор линейной скорости, ко з.ходу подынтегральной функции которого подключен выход регистра програММируемой ли1нейной скорости, .интеграторы си1нуса И Косинуса угла наклона радиуса окружности, выходы (Которых через последовательно соединенные интеграторы раДиуса и 1иакоп(ители .коор.динатных прираще1НИИ подсоединены IK соответствующим -схемам у1Пра|Вления .приводаими и схемам окончания ;иНтерПОлирава1Иия, .инеННЫ1М с регистрами жонечных значений жоординат, а также регистр ,програ1ММИ1руемого радиуса.
В ,H3iBecTiHOM и)нтер|НОляторе за1да(Еная лилейная окорость 1обеонечИ1ва.ется только для одного расчетного значения радиуса, при об(работке окружноютей гменьших р-адиусов линейиая iOKOipocTb уменьшается, т. е. интерполятор ле обеопеч1И1В ает требуемо ро быстродействия.
Ограяиченнал область применения и (низкое бы€тро|деЙ1С11в,ие является недостаткоМ известного интерполятора.
Целью изобретения является устранение указанных недостатков, т. е. раюширение области ,прИ1менбния и повышение быстродействия интереолятора.
У|кава1нная цель достигается нутем нве)дееия (внутри общепринятого диап.азона переключения объемо;в b 10) нескольких дополнительных (Ступеней переключения объемов с плаиным изменением частоты на входе интерполятора в за;висимости от радиуса К внутри 1каждой дополнительной ступени. Переключение объемов производится в за1виоимости от старшего десятичного разряда радиуса, соответствующего переключаемой декаде интелратора. Внутри выделенного диапазона -изменения радиуса, соответствующего переключаемому объему Q,-, входная частота
D
меняется в отношении- -.
R MIUI
Коэфф|Ициент пронорц1ионально1сти (между входной частотой интерполятора я радиусом R paiBee величине переключаемого объема Q,-, т. е. изменяется стуиенчато в зависимости от величины Qi. Внутри переключаемого объема Q; входная частота «нтеряолятора /вх изменяется по закону:
f 0-- .У, , .
npiH заданной рабочей частоте .интерполятора, определяемой допустимой ра1бочей частотой его элементов, пре1ДЛагаем;ая схема обеспечивает повышение выходной частоты интерполятора, то есть повышение его быстродействия.
Предлагаемый интерполятор отличается тем, что со|держит схему фор1мирования входной частоты, шифратор, схему ошределевия приведенного радиуса п два вентиля. Первый вход схемы формирования входной частоты подключен « интегратору линейной скорости, а выход - ко входам независимой пер еменной интеграторов синуса и «ооинуса угла наа лона радиуса окружности. Выхад регистра программируемого радиуса соединен с первым входоМ схемы определения приведенного радиуса и входом нлиф ратора, один (выход которого 1ПОДключен ко входу схемы формирования входной частоты, а другой - ко второму входу схемы определения приведенного радиуса и к -кодовым входам вентилей. Управляющий вход первого вентиля соединен с выходом интегратора синуса угла Наклона
радиуса окружности, а выход - со 1входом подынтегральной функции интегратора косинуса угла наклона радиуса окружности, выход Которого подключен к управляющему входу второго вентиля, подсоединенного ко
входу подынтегральной функции интегратора синуса угла накЛОна радиуса О1круж1ности. Выход схемы определения приведенного радиуса подсоединен а третьему входу схемы формирования входной частоты и ко входам
падынтегральной функции интеграторов радиуса.
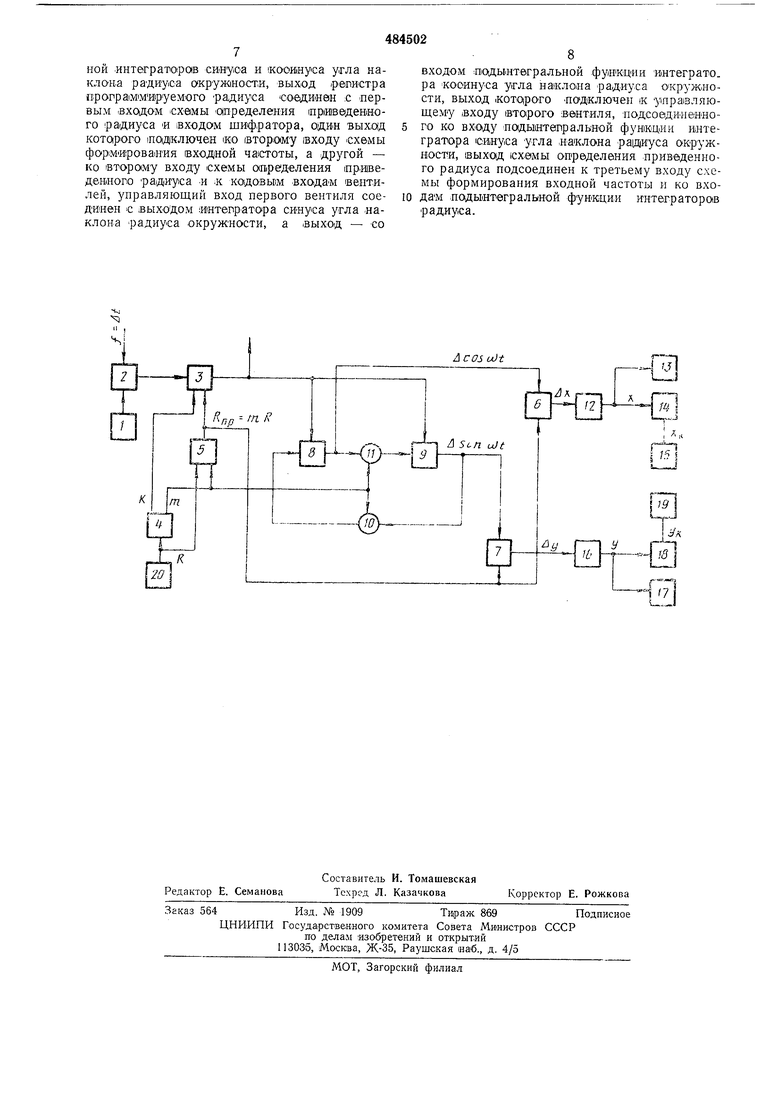
На чертеже представлена блок-схема предлагаемого устройства.
Регистр 1 прОграМ М1Ирующей линейной скорости V подключен ко входу подынтегральной функции интегратора 2 линейной скорости, на ,незави1симой переменной которого :по1Дключен юигнал задания времениых интервалав / Af, а .выход которого подключен к первому входу схемы 3 формирования входной частоты интерполятора, второй вход которой подключен к первому выходу шифратора 4, а третий вход подключен
-к ВЫХОДУ схемы 5 определения приведенного радиуса „р и ко входам подынтегральных функций интеграторов 6 и 7 радиуса. Выхад схемы 3 соединен со 1входамИ независимой переменной интеграторов 8 и 9 синуса и ашоинуса угла наклона радиуса, вход подынтегральной функции интегратора 8 .соединен с выходом вентиля 10, кодовый вход которого соединен ю коДовьгм входом вентиля И, со вторым выходом щифратора 4 И С первым
входом схемы 5 определения радиуса „,/ входы подынтепральной функции интеграторов 8 |И 9 соединены С (ВыХОда-ми вентилей 10 и 11, управляющие Входы которых подключены Соответственно К выходам интеграторов 9
и В и .ко входа (независимой переменной интеграторов 6 И 7 радиуса.
Выход Интегратора 6 соединен со входов цаконителя 12 текущего нриращения Лл:, выход накопителя 12 соединен со входами Схемы 13 упр-авления пр1иводом и схемы 14 определения 1конца интерполяции по X, второй ВХ01Д которой ПОдключен к реги1стру 15 конечного значения координаты X. Выход интегратора 7 соединен со вхо|дом накопителя 16 текущ:их приращений Дг/, выход которого соединен со входами схемы 17 управления приводом и схемы 18 определения конца интерполяции по У, второй вход которой П0(ДКЛЮчен iK регистру 19 конечного значения координаты У. Выход регистра 20 радиуса R 1подключен ко входу щифратора 4 и КО второму входу схемы 5 определения приведенного радиуса К„р .
Устройство работает следующим О разом. Диапазон изменения радиуса в разбивается на ступеней, каждой из которых соот1ветствует авой объем интеграторов Q,. Излфенение объемом интеграторов 8 (sinco/) и 9 (cos(i)/) достигается игутем из менення цены дискрет т этих ннтеграторОВ. Величина т определяется ,ка«:
° максQ л:.IXс Ь
R макс .Q;Q i
где: . - максимальный радиус ВНутрн
i-ii ступени.
Переключение объемов ннт-еграторов 6 и 7, умножающих :вел.ичи1иу sino)/ (CoscoO «а вел-ичину /, достигается путем умножения величины sinco/ (icosco/) иа вел-ич-нну лриведенното радиуса R „,, mJ. Ступенчатое лереключение коэффициента п.ронорцианальности |меж|ду 1ВЫХОДНОЙ частотой И1Нтер1Полятора и радиусом R достигается путем деления частоты f J, интертолятора на величнпу приведенного радиуса и ум1ножен1ня на 1.масштабный множитель К, величина которого не зависит от велнчины радиуса. Значение множителя К выбирается исхо.дя из того, чтобы етри радиусе Mawj данного дианазона была бы обеспечена требуемая частота «а .входе интернолятора.
Величи1на ирограМ.мируе.мого радиуса R поступает на вход шифратора 4. Шифратор IB за1ВИ1СИ1Мости от диапазона радиуса R выдает величину цены дискреты m интеграторов 8 и 9 и величину масштабного коэффициента К. Схема 5 получения радиуса R щ-, умножает величину R на величину т. Так величина т представлена целым чнслом т 1, 2, 5), схема ум1ножения может быть выполнена путем нростого /п-кратного суммирования величины R. В интеграторе 2 с частотой f ssA/ суммируются значения линейной скорости V, при этом на выходе интегратора 2 нолучается частота fj,, нропорциональная скорости. Частота f, поступает на вход схемы 3 получения входной частоты интернолятора, на другие два входа которой величины 1масштабного коэффициента К и радиуса Частота на выходе схемы 3 опрйделяется формулой:
f -Ь:
/ в.ч -
Rnp
Схема 3 нолучения входной частоты интерполятора может быть вьиполнена с помощью двух .параллельных интеграторов, нричем частота нроходит на вход независимой переменной интеграторав, а величины /( и Rup - на входы подынтегральных функций интеграторов. Частота f,,.tnocTynaeT па входы незавнсимой переменной .интеграторов В и 9, соединенных друг с друго м нри по1МОЩИ отрицательной обратной связи. В регистры подынтегральных интеграторов 8 и 9 вводятся значения since и cose/, в начальной точке обработки.
При наличии импульса переполнения на управляющих входах вентилей 10 и 11 на вход подынтегральных функций ннтеграторов 8 и 9 происходит значение дискреты т, aia величину -которой изменяется содержимое регистров подынтегральных фупкцнй ннтеграторов 8 п 9. На выходе ннтеграторов 8 н 9 получаются атриращения функций cosco/ и since/, которые в нтеграторах 6 и 7 умножаются на радиус Rnp. На выходеинтеграторов 6 ц 7 нолучаются приращения и Ау. При этом при увеличении дискреты интеграторов 8 и 9 в т раз количество им.пульсов на входах неза1висимой переменной ннтеграторов 8 -и 9
уменьшается в т раз. Чтобы не изменилась цена дискреты величин Ал- и Аг/, необходимо увеличить во столько же раз цену дискреты интеграторов 6 и 7, что достигается при умножении импульсов приращеНИЙ Asinco/ и
ACOSCO/ .на ве.тичину радиуса, увеличенного в m раз. При этом одиашково атзменяются объемы интеграторов 6-9. Значения Ах н Ау накаиливаются в наа опителях 12 и 16. Текущие значения координат X п У с выхода наконнтелей 12 и 16 поступают в схему управления приводом и в схему определения конца интерполяции по данной координате, где они сравниваются с конечны.ми значеннялш координат Хк-и УК .
Днскреты центра.чьного yr.ia для унравления третьей координатой 1нолучаются на выходе схемы получения входной частоты интерполятора (частота fg, ), При этом цена
/.;
дискреты центрального угла завнснт от диапазона радиуса, что может быть легко учтено в cxetMe управлення третьей координатой умножением частоты /и на величину т.
Предмет изобретения
Кругавой н;нтерполятор для контурных систем п.рог.рам1М1НОго управления станками, содержащий интегратор линейной скорости, ко
входу подынтегральной функции которого подключен выход регнСтра про.грам1мнруемой линейной скорости, -интеграторы синуса и косинуса угла наклона радпуса окружности, выходы которых через последовательно соеднненные интеграторы радиуса и накопители координатных приращений подсоединены к соответствующим схема-м управления нриводами (И схемам око.нчания интернолирования,
соединениы.м с релн.страми коиечных значений коордннат, а также регистр программируемого радиуса, отличающийся тем, что, с целью расширения областп прнменсшш н повышения быстродейств1ия интерполятора, он
содержит схему форлшрсзапия входной частоты, шиф затср, схему онре.деления приведенного радиуса н два 1вент.иля, причем первый вход схемы формирования входной ча.стоты нодключе к интегратору линейной .скорости,
а выход - ко входам независимой переменной .интеграторов синус а и косинуса угла наклона раяиу.са акруж1ност,и, выход .регистра oporpaiMiMBpyeMoro радиуса соединен с первым .входом .сХвмы определения приведевного радиуса « входом шифратора, выход которого 1ПО|Дключен же второму шходу схемы формирования входной ча:стоты, а другой - ко второму входу схемы определения праведбБного радиуса .и к кодовым входам вентилей, управляющий вход первого вентиля соединен :с ;выходом интепр атора синуса угла -наклона радиуса окружности, а .выход - со
входом поды нтегральной фуикции интеграто. ра Косинуса угла на1кло.на радиуса о-круж.ности, выход .которого Надключен .к упра1вляющему входу второго в ентиля, подсоединенного ко входу поды1нтелраль:ной фунмдии интегратора 1СИ|ну.са угла .наклона радиуса окружности, выход схемы определения приведенного радиуса подсоединен к третьему входу схемы формирования входной частоты и ко входам .подынтегральной функции интеграторов радиуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Круговой интерполятор для контурных систем программного управления станками | 1973 |
|
SU499556A1 |
| Круговой интерполятор | 1978 |
|
SU798730A1 |
| Интерполятор | 1978 |
|
SU813365A1 |
| ГЕНЕРАТОР ДУГ ОКРУЖНОСТЕЙ | 1973 |
|
SU397902A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ КОРНЕВЫХ ГОДОГРАФОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU397914A1 |
| ИМПУЛЬСНЫЙ ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1970 |
|
SU260973A1 |
| МНОГОКАНАЛЬНЫЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU384115A1 |
| Цифровой круговой интерполятор | 1985 |
|
SU1327064A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |