1
Предлагаемый линейный интерполятор может быть использован в системах числового программного управления металлорел ущими станками.
Известен линейный интерполятор, содержащий сумматор, выход которого соединен с входом выходного регистра и через соединенный с устройством управления вентиль и динамический регистр подключен к первому из своих входов. Однако в таком интерполяторе используют два динамических регистра.
Предложенное устройство отличается тем, что оно содержит одноразрядную линию задержки, вход которой соединен с выходом динамического регистра, а выход подключен к второму входу сумматора.
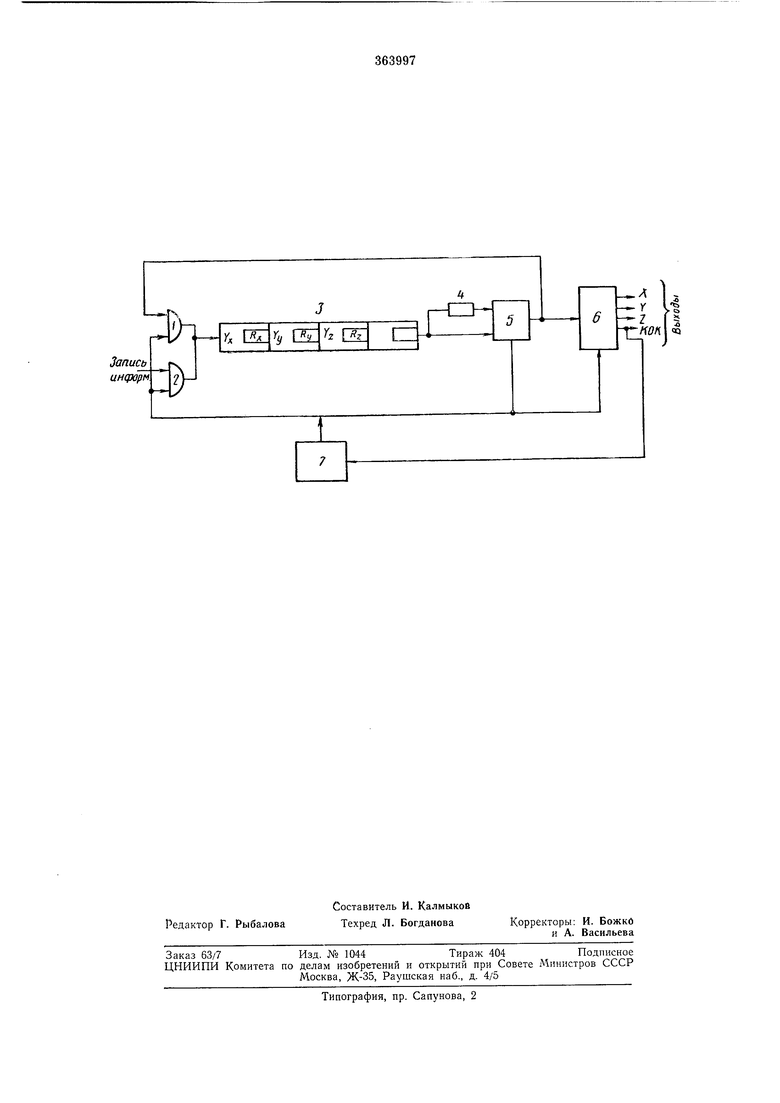
Это позволяет упростить интерполятор. На чертеже показана схема интерполятора. Интерполятор содержит вентили / и 2, динамический регистр 3, одноразрядную линию 4 задержки, сумматор 5, выходной регистр 6 и устройство 7 управления. Динамический регистр 5 своим выходом подключен к первому входу сумматора 5 и через одноразрядную линию задержки соединен с вторым его входом. Выход сумматора 5 по одной цепи соединен через вентиль / с входом динамического регистра 3, а по второй - с входом выходного регистра 6, который свои.ми выходами связан с исполнительными двигателями и устройством управления. Ввод информации интерполятора осуществляется через вентиль 2, находящийся на входе динамического регистра. Цепи прохождения сигналов через перечисленные узлы коммутируются по времени устройством управления.
Динамический регистр 3 предназначен для приема числовой информации координат и хранения промежуточных значений вычислеНИИ в процессе интерполяции. В нем расположены цифровые интеграторы, количество которых определяется числом координат, и счетчик количества циклов, с помощью которого определяется конец обрабатываемого
участка.
Цифровой интегратор представляет собой два регистра, первый из которых хранит величины координат и называется 7-регистром.
Для различных координат он обозначается YX, Yy, YZ и т. д. При линейной интерполяции значения F-регистров координат не изменяются. Второй регистр цифрового интегратора предназначен для хранения остатков величин,
которые получаются при последовательном суммировании значений У-регистров, а возникающие переполнения являются выходными сигналами интерполятора по соответствующим координатам. Этот регистр называется
/ -регистром и обозначается RX, Ry ... и т. д.
Предлагают чередовать разряды У-регистра с разрядами / -регистра, относящихся к одной координате, т. е. в нечетных местах динамического регистра 3 размещают разряды У-регистров, а в четных - J -регистров. Таким образом, за младщим разрядом У -регистра следует младший разряд /.х-регистра, затем идет второй разряд Кх-регистра, а за ним - второй разряд ОС-регистра и т. д.
После нрохождения цикла вычисления . в цифровом интеграторе координаты X начинает вычисляться вторая координата У, за ней третья и т. д.
Сумматор 5 нредназначен для сложения величин, расиоложенных в У-регистрах, с величинами, хранящимися в -регистрах, с записью результата в / -регистры. На один вход сумматора 5 через одноразрядную линию 4 задержки иоступает сигнал У-регистров, а на второй - от -регистров. Задержанные на 6дин такт- разряды У-регистров совмещаются по времени с соответствующими разрядами У -регистров, после чего осуществлят их сложение. При образовании переноса последний запоминается внутри сумматора 5 до сложения следующих разрядов. Кроме функции сложения чисел, по сигналам устройства управления через сумматор 5 замыкается цепь циркуляции информации, проходящая через вентиль 1.
Выходной регистр 6 служит для приема выходных сигналов координат, следующих последовательно во времени, и распределения их по соответствующим выходным цепям по сигпалам от устройства управления.
Устройство 7 управляет работой отдельных узлов интерполятора и обеспечивает их взаимодействие согласно алгоритму линейной интерполяции.
Интерполятор работает следующим образом.
В начале работы по сигналам с устройства 7 управления вводится информация в д;1намический регистр 3 через вентиль 2. Значения величин координат записываются в У-регистры. В динамическом регистре 3, кроме интеграторов, хранящих величины координат, размещен счетчик циклов, в У-регистр которого
вводится +1. В / -регистры всех интеграторов информация не вводится. После введения информации вентиль 2 перекрывается, а через вентиль / замыкается цепь циркуляции информации через сумматор 5.
В течение цикла вычислений разряды чисел из У-регистров поступают на сумматор 5 по двум цепям. По цепи без линии задержки они проходят через сумматор 5 и подаются в
дина.мический регистр 3 через вентиль 1, при этом арифметические операции с ними не производятся. По цени через линию задержки они задерживаются на один такт и совмещаются по времени с соответствующими разрядами
/ -регистра, происходит суммирование содержимого У- и / -регистров с записью результата в / -регистр.
В конце суммирования но каждому интегратору при наличии приращения записывается
единица в соответствующий триггер выходного регистра 6. Если приращение отсутствует, в выходной регистр 6 заносится нуль. В счетчике циклов происходит занесение +1 в / -регистр счетчика.
После считывания информации с выходного регистра 6 сигналами устройства управления вычисления повторяются, при этом в счетчике циклов в / -регистре получается число 2. Такие циклы вычислений повторяются до тех
пор, пока в .R-регистре счетчика циклов не получится приращение, которое поступает на выходной регистр 6 и далее на устройство управления. После этого вычисления прекращаются и осуществляется ввод информации следующего кадра.
Предмет изобретения
Линейный интерполятор, содержащий сумматор, выход которого соединен с входом выходного регистра и через вентиль, соединенный с устройством управления, и динамический регистр подключен к первому из своих входов, отличающийся тем, что, с целью упрощения устройства, он содержит одноразрядпую линию задержки, вход которой соединен с выходом динамического регистра, а выход подключен ко второму входу сумматора.
Запись uHqjop
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПОСТРОЕНИЯ КОРНЕВЫХ ГОДОГРАФОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU397914A1 |
| ГЕНЕРАТОР ДУГ ОКРУЖНОСТЕЙ | 1973 |
|
SU397902A1 |
| ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР | 1972 |
|
SU343265A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ДВОИЧНО- ДЕСЯТИЧНЫХ ЧИСЕЛ В ДВОИЧНЫЕ | 1970 |
|
SU260962A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Круговой интерполятор | 1985 |
|
SU1359772A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Линейно-круговой интерполятор | 1979 |
|
SU847279A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |