Изобретение может |быть испйльзовйно в лабораторных и производственных условиях для измерения вращающего момента магнитоэлектрических датчиков момента любого типа.
Известен способ определения момента по току обмотки эталонного датчика, расположенного на общей оси с проверяемым датчиком. Этот способ не о беспечивает высокой точности замера момента, так как на результат измерения .полностью налагаются логрещности измерительных приборов и элементов конструкции.
Повышение точности измерения момента может быть достигнуто замеиой «епосредствеяного измерения ди|фференциальным, при котором погрешность измерительных приборов и элементов конструкции будут налагаться на разность эталонного и проверяемого датчиков.
Это достигается за счет создания способа измерения момента вращения, использующего принцип обратимости электрической мащины, заключающийся применительно к магнитоэлектрическим датчикам момента в том, что о моменте датчика нри неизменном токе в его обмотке можно судить по величине электродвижущей силы, наводимой в обмотке статора при постоянной угловой скорости вращения ротора.
Фиксирование на кривой разности моментов, соответствующей определенному положению ротора относительно статора, осуществляется датчиком меток, подвижная часть которого укреплена на той оси, что и роторы датчиков; при замыкании и размыкании контактов датчика меток на вход мнллиампера додается импульсное напряжение.
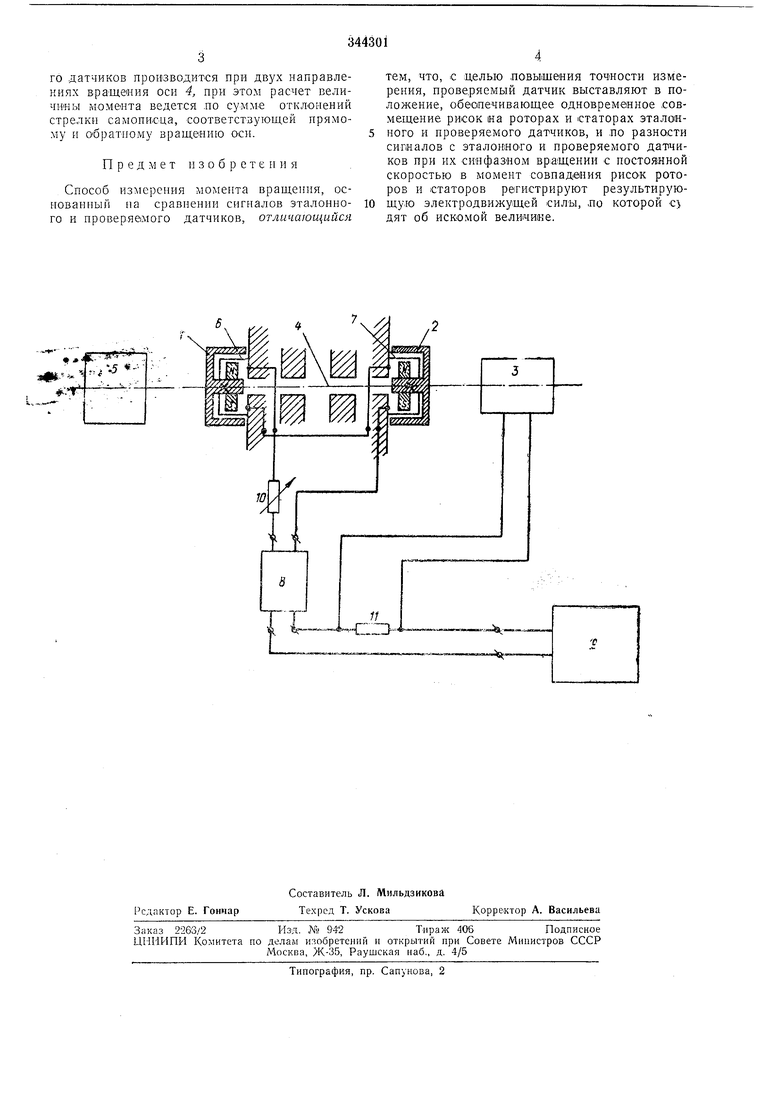
На чертеже представлена электромехани0ческая схема для осуществления способа.
Роторы эталонного / и проверяемого 2 датчиков момента и подвижная часть датчика меток 3 раснололсены на оси 4, приводимой с малой скоростью вращения реверсивны.ч 5 синхронным двигателем с редуктором 5. Обмотки эталонного 6 и проверяемого 7 датчиков соединяются дифференциально. Результирующая э.д.с. вр ащения обмоток датчиков подается на усилитель постоянного тока 8,
0 выходной сигнал усилителя записывается самопишущим миллиамперметром 9. Юстировочный резистор W служит для компенсащни технологического разброса омического сопротивления обмоток датчиков и для получения удобного масн1таба записи.
Резистор и служит для введения в сигнал, записываемый миллиамперметром, меток, поступающих с датчика меток.
го датчиков производится при двух направлениях вращения оси 4, при этом расчет величины момента ведется ,по сумме отклонений стрелки самописца, соответствующей прямому и Обратному вращению оси.
Предмет и з о б р е т е п и я
Способ измерения момента вращения, основанный на сравнении сигналов эталонного и проверяемого датчиков, отличающийся
тем, что, с целью повышения точности измерения, проверяемый датчик выставляют в положение, обеспечивающее одновременное совмещение рисок на роторах и статорах эталонного и проверяемого датчиков, и ло разности сигналов с эталонного и проверяемого датчиков при их синфазном вр:ащении с постоянной скоростью в момент совпадения рисОК роторов и статоров регистрируют результирующую электродвижущей силы, ло которой с дят об искомой величине.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ГИРОПЛАТФОРМЫ | 1996 |
|
RU2106601C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ОПОР ТРЕНИЯ АКСЕЛЕРОМЕТРА | 1993 |
|
RU2039995C1 |
| Способ изготовления усовершенствованной магнитоэлектрической машины | 2017 |
|
RU2667661C1 |
| Вискозиметр | 1975 |
|
SU655932A1 |
| Устройство для проверки многополюсных датчиков угла | 1975 |
|
SU525151A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОВЫШЕННОГО ВЫХОДНОГО НАПРЯЖЕНИЯ | 2016 |
|
RU2632817C1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU817880A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2013 |
|
RU2542596C1 |
