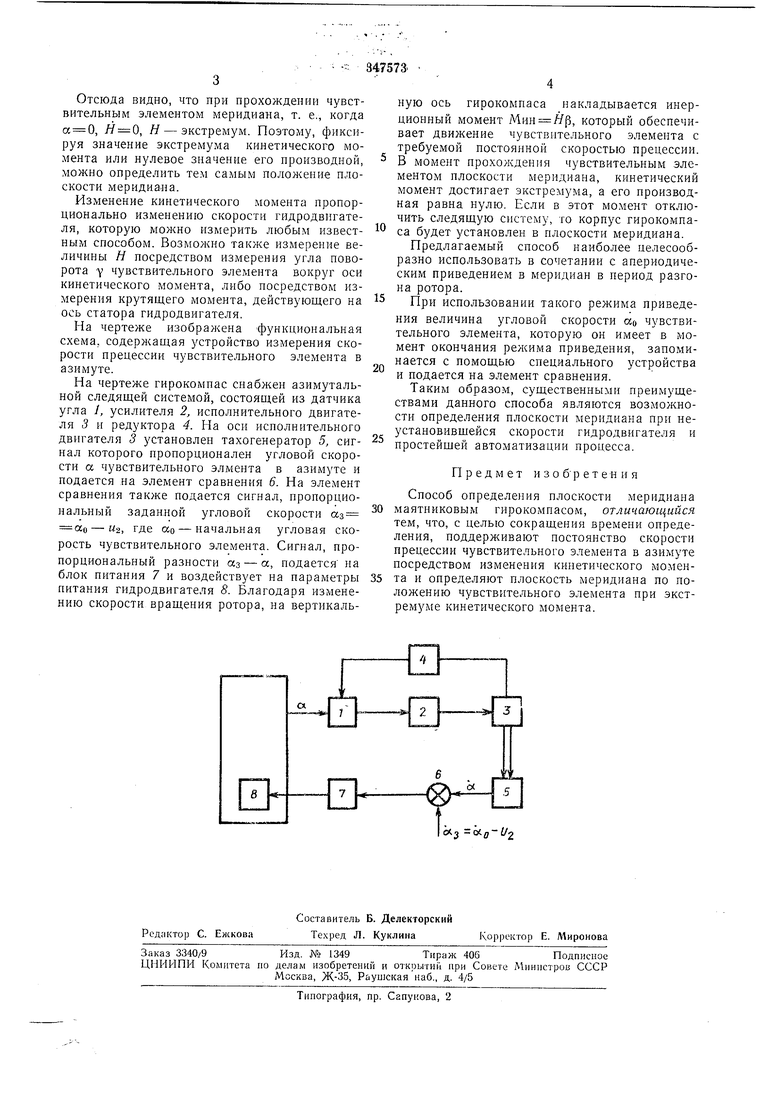
Изобретение относится к области точного приборостроения. Известные способы онределения плоскости меридиана с помощью маятниковых гирокомпасов, как правило, заключаются в нахождении равновесного положения прецессионных колебаний в азимуте чувствительного элемента, ротор которого вращается с постоянной скоростью. При этом время измерения складывается из времени разгона ротора до номинальной скорости вращения и времени, необходимого для онределения положения равновесия азимутальных колебаний чувствительного элемента после разгона. Цель изобретения - сократить время определения плоскости меридиана. Это достигается тем, что поддерживают постоянство скорости прецессии чувствительного элемента в азимуте посредством изменения кинетического момента и определяют плоскость меридиана по положению чувствительного элемента при экстремуме кинетического момента. Сущность способа становится понятной из анализа уравнений маятникового гирокомпаса при неустановившемся кинетическом моменте. а и р - углы отклонения чувствительного элемента от плоскостей меридиана и горнзонта соответствен о; // --кинетнческцй момент; Л1 - статнческий молгент маятника;/1 - момент инерции чувствительного элемента вокруг вертикальной оси; 1--псозф - горизонтальная составляющая угловой скорости вращения Земли; U2 ii 81пф - вертикальная составляющая угловой скорости вращения Земли; и - угловая скорость вращения Земли; Ф - широта места. а -const . Тогда из (1) 2(i Ji)./y - kH. сь К - коэффициент нроиорциональноежду углом отклонения чувствительною нта в азимуте и производной кинетичесмомента. В реальных конструкциях обычеспечивается, что коэффициент Л не раулю. Отсюда видно, что при прохождении чувствительным элементом меридиана, т. е., когда , Н 0, Н - экстремум. Поэтому, фиксируя значение экстремудма кинетического момента или нулевое значение его нроизводной, можно определить тем самым положение плоскости меридиана. Изменение кинетического момента пропорционально изменению скорости гидродвнгателя, которую можно измерить любым известным способом. Возможно также измерение величины Я посредством измерения угла поворота Y чувствительного элемента вокруг оси кинетического момента, либо посредством измерения крутящего момента, действующего на ось статора гидродвигателя. На чертеже изображена функциональная схема, содержащая устройство измерения скорости прецессии чувствительного элемента в азимуте. На чертеже гирокомпас снабжен азимутальной следящей системой, состоящей из датчика угла /, усилителя 2, исполнительного двигателя 3 и редуктора 4. На оси исполнительного двигателя 3 установлен тахогенератор 5, сигнал которого пропорционален угловой скорости а чувствительного элмента в азимуте и подается на элемент сравнения 6. На элемент сравнения также подается сигнал, пропорциональный заданной угловой скорости аз ао - «2, где 0,0 - начальная угловая скорость чувствительного элемента. Сигнал, пропорциональный разности аз - а, подается на блок питания 7 и воздействует на параметры питания гидродвигателя 8. Благодаря изменению скорости вращения ротора, на вертикаль0 3ную ось гирокомпаса накладывается инерционный момент Мин Яр, который обеспечивает движение чувствительного элемента с требуемой постоянной скоростью прецессии. В момент прохождения чувствительным элементом плоскости меридиана, кинетический момент достигает экстремума, а его производная равна нулю. Если в этот момент отключить следящую систему, то корпус гирокомпаса будет установлен в плоскости меридиана. Предлагаемый способ наиболее целесообразно использовать в сочетании с апериодическим приведением в меридиан в период разгона ротора. При использовании такого режима приведения величина угловой скорости «о чувствительного элемента, которую он имеет в момент окончания режима приведения, запоминается с помощью специального устройства и подается на элемент сравнения. Таким образом, существенными преимуществами данного способа являются возможности определения плоскости меридиана при неустановившейся скорости гидродвигателя и простеищеи автоматизации процесса. Предмет и з о б р е т е н и я Способ определения плоскости меридиана маятниковым гирокомпасом, отличающийся тем, что, с целью сокращения времени определения, поддерживают постоянство скорости прецессии чувствительного элемента в азимуте посредством изменения кинетического момента и определяют плоскость меридиана по положению чувствительного элемента при экстремуме кинетического момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения меридиана маятниковым гирокомпасом | 1981 |
|
SU1035423A1 |
| Наземный гирокомпас | 1976 |
|
SU606414A1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
