Изобретение относится к станкостроению и может быть использовано в приводах подачи металлорежущих станков, в том числе в станках с числовым программным управлением с автоматическим регулированием резания.
Известны регулируемые электрогидравлические приводы подачи, включающие гидронасос, усилитель управляющего электрического сигнала, электрогидравлический преобразователь, задатчик входного сигнала, гидродвигатель в качестве исполнительного органа и тахогенератор, установленный на валу гидродвигателя, осуществляющий отрицательную обратную связь по скорости вращения. Однако исполнительным органом такого лривода может быть только гидродвигатель.
В настоящее время больщое распространение получили металлорежущие станки с приводами подачи с гидроцилиндрами. Однако приводы с гидродвигателями по сравнению с приводами с гндроцилиндрами имеют ограниченный диапазон регулирования (с учетом быстрых ходов), низкие динамические показатели приводов при определенных соотнощениях жесткости иривода и характеристик трения в направляющих станках, больщую сложность и стоимость.
го привода подачи металлорежущих станков с щироким диапазоном бесступенчатого регулирования скорости и высокими статическими и динамическими качествами на базе гидроцилиндра.
Это достигается использованием блока отрицательиой обратной связи по скорости, включающего измерительный гидромотор и электрический датчик угловой скорости вращения, установлеииый на валу гидромотора. Измерительный гидромотор соединен последовательно с одной из полостей гидроцилиндра, а сигнал датчика угловой скорости вращения подается в цепь управления электрогидравлического преобразователя. Это позволяет осуществлять отрицательную обратную связь но скорости перемещения щтока относительно гильзы гидроцилиндра.
Цель достигается также организацией в приводе дополнительной отрицательной обратной связи но ускорению исполнительного органа, реализованной с помощью RC цени, и формированием сигнала отрицательной обратной связи по скорости пульсирующим. Пульсирующий сигнал в цапи основной отрицательной обратной свяЗИ по скорости обеспечивает вибрациопиую линеаризацию нелинейных характеристик электрогидравлического
татических и дииамических характеристик рИвода.
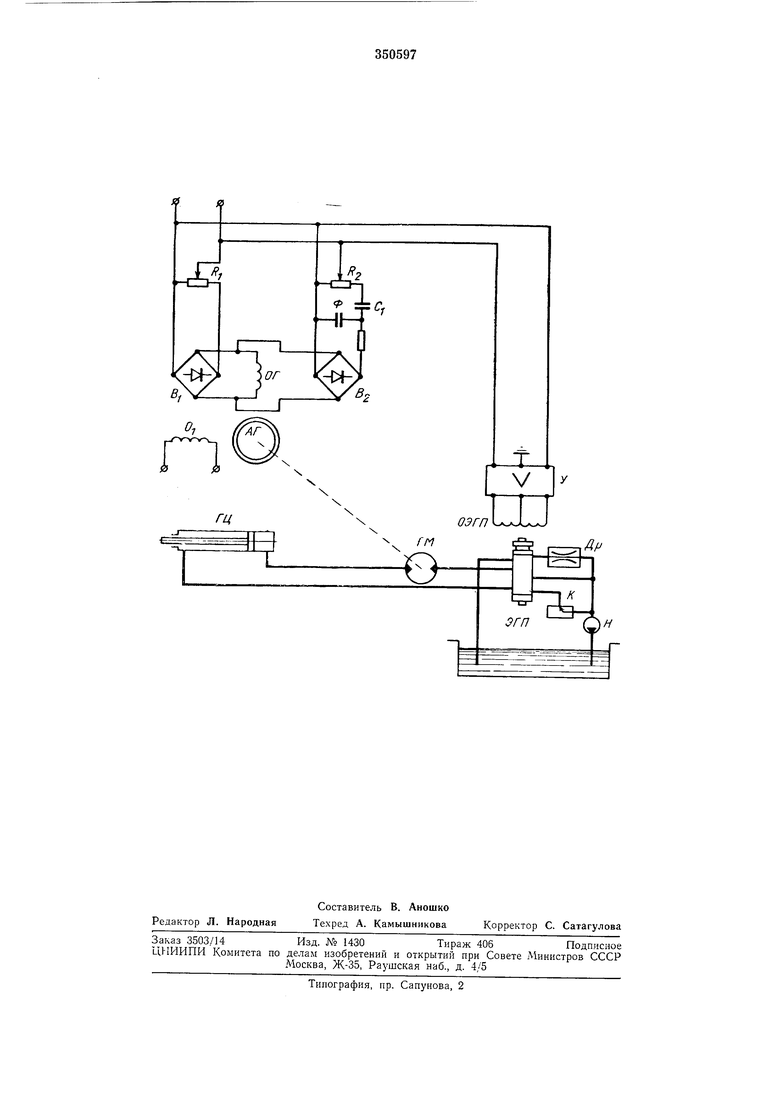
На чертеже представлена принципиальная хема предлагаемого электрогидравлического ривода.
С одной из полостей гидроцилиидра ГЦ содинеи гидронасос Н, :клапаи К, дроссель Др, лектрогидравлический преобразователь ЭГП измерительный гидромотор ГМ. На валу М установлен электрический двухфазный асинхронный двигатель АГ с полым ротором, работающий в генераторном режиме. К геиераториой обмотке ОГ генератора АГ подключены цепи отрицательных обратных связей.
Цепь отрицательной обратной связи по скорости состоит из выпрямителя BI, регулируемого сопротивления ь и включена параллельно цепи задающего сигнала. Цепь отрицательной обратной связи по ускорению состоит из выирямителя BZ, фильтра Ф, регулируемого сопротивления и конденсатора Ci и включена параллельно цепи задающего сигнала. В цепь управления ЭГП включен балансный двухкаскадный усилитель У. К выходу У л одкл анены обмотки ОЭГП управлеПИЯ 5ГЛ.. . .
Гидр6:насО|С Н Подает рабочую жидкость в нагнетательную линию и параллельно через дроссель Др в линию управления ЭГП. Рабочая жидкость-из ЗГ/7 поступает в измерительный гидромотор ГМ, а из него - в гидроцилиидр. Перемещаясь, поршень гидроцилиндра ГЦ вытесняет рабочую жидкость через ЭГЛ на слив. Скорость вращения ГМ однозначно определяет скорость перемещения поршня огиосительно гильзы гидроцилиндра ГЦ. ГМ вращает ротор генератора АГ.
С обмотки Oi электрические сигналы отрицательной обратной связи до скорости исполнительного органа через выпрямитель В, и сопротивление RI, а также отрицательной обратной связи по ускорению исполнительного органа через выпрямитель В, фильтр Ф, конденсатор Ci и регулируемое сопротивление KZ сравниваются с задающим сигналом и результирующий сигнал подается на вход усилителя У и далее -на обмотки ОЭГП управления преобразователя ЭГП.
В зависимости от величины и полярности результирующего сигнала изменяется величина и направление расхода рабочей жидкости, подаваемой в гидроцилиндр, и, следовательно, скорость и направление движения щтока относительно гильзы гидроцилиндра.
Цредмет изобретения
1. Электрогидравлический следящий привод подачи металлорежущих станков, исполнительный орган которого связан с гидронасосом через электрогидравл-ический преобразователь, управляемый задатчиком входного сигнала через усилитель, отличающийся тем, что, с целью расщирения технологических возможностей привода и обеспечения бесступенчатого регулирования скорости в щироком
диапазоне, -исполнительный орган привода выполнен в виде гидроцилиндра и введен блок отрицательной обратной связи по скорости перемещения исполнительного органа в виде гидромотора, соединенного с одной из полостей гидроцилиндра, и электрического датчика угловой скорости вращения, установленного на валу измерительного гидромотора, цепь выходного сигнала которого подключена iK цепи задающего сигнала.
2. Нривод по п. 1, отличающийся тем, что, с целью обеспечения высоких дииамических качеств привода в режиме слежения, параллельно выходной цепи отрицательной обратной связи по скорости перемещения исполнительного органа включена цепь отрицательной обратной связи по ускорению исполнительного органа, выполиенная в виде конденсатора и регулируемого сопротивления, включенного в цепь задающего сигнала.
3. Нривод по пп. 1 и 2, отличающийся тем, что, с целью повышения статических характеристик привода, в качестве электрического датчика угловой скорости вращения использован асинхронный генератор малой мощности, с выходной обмоткой которого черездвухполупериодиый выпрямитель связано регулируемое сопротивление, включенное в цепь задающего сигнала.
/5
Др

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Электрогидравлический привод подачи деревообрабатывающего станка | 1984 |
|
SU1166991A1 |
| Электрогидравлический привод | 2019 |
|
RU2708012C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1973 |
|
SU388873A1 |
| Электрогидравлическая следящая система | 1992 |
|
SU1834993A3 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2006 |
|
RU2325561C2 |
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1966 |
|
SU185484A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU368418A1 |