Изобретение относится к лодъемно-транспортной технике, в частности к грузоподъемным устройствам.
Известные грузоподъемные устройства содержат лебедку со свободно вращающимися на приводном валу двумя барабанами, на которых закреплены концы грузового каната, запасованного путем трособлочной системы одностороннего движения 0|боих его ветвей, несущих подвижный блок с захватным органом. Однако они не обеспечивают дистанционное управление захватным органом.
Для этого барабаны лебедки включены между собой посредством дифференциала, выполненного в виде водила с парой конических щестерен, взаимодействующих с шестернями барабанов и кинематически связанного с приводным валом и стопором, смонтированным на подпружиненном стержне, расположенном соосно внутри приводного вала и соединяющим-разъединяющим конические щестерни водила с барабанами при подъеме и опускании захватного органа посредством торцового ключа, взаимодействующего с подпружиненным стержнем.
так, что при остановленном приводе поворотом торцового ключа в одну сторону плечи рычагов сближаются, а в другую сторону наоборот расходятся.
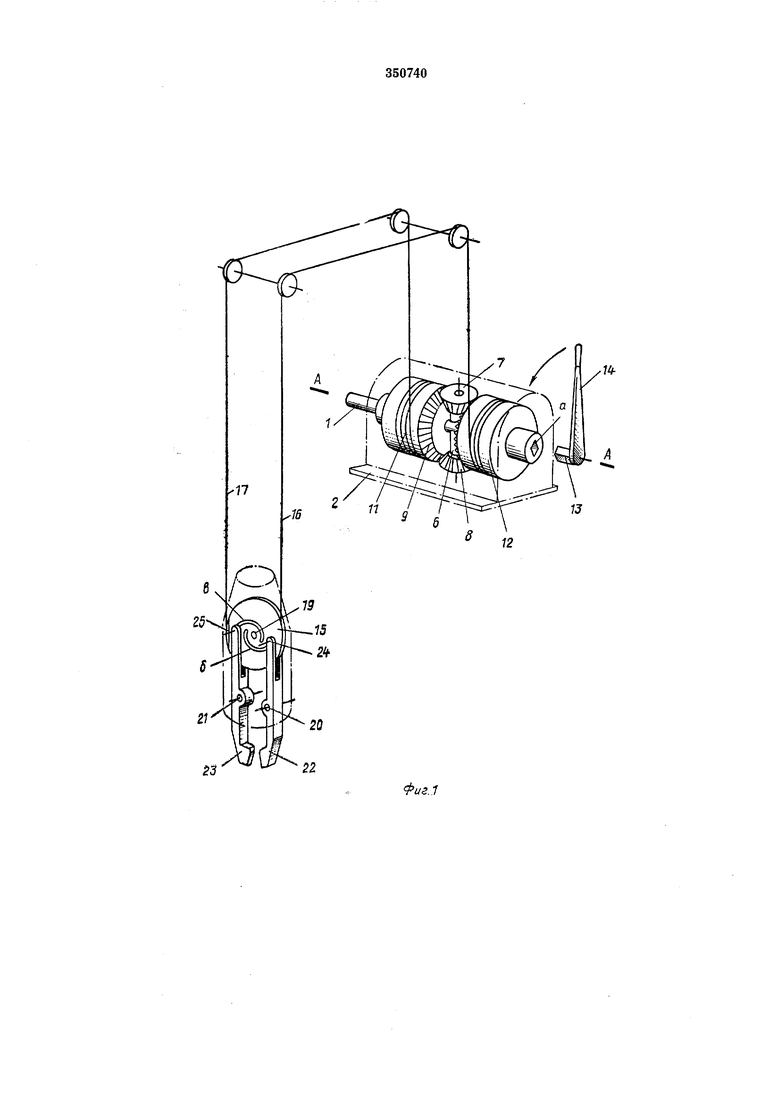
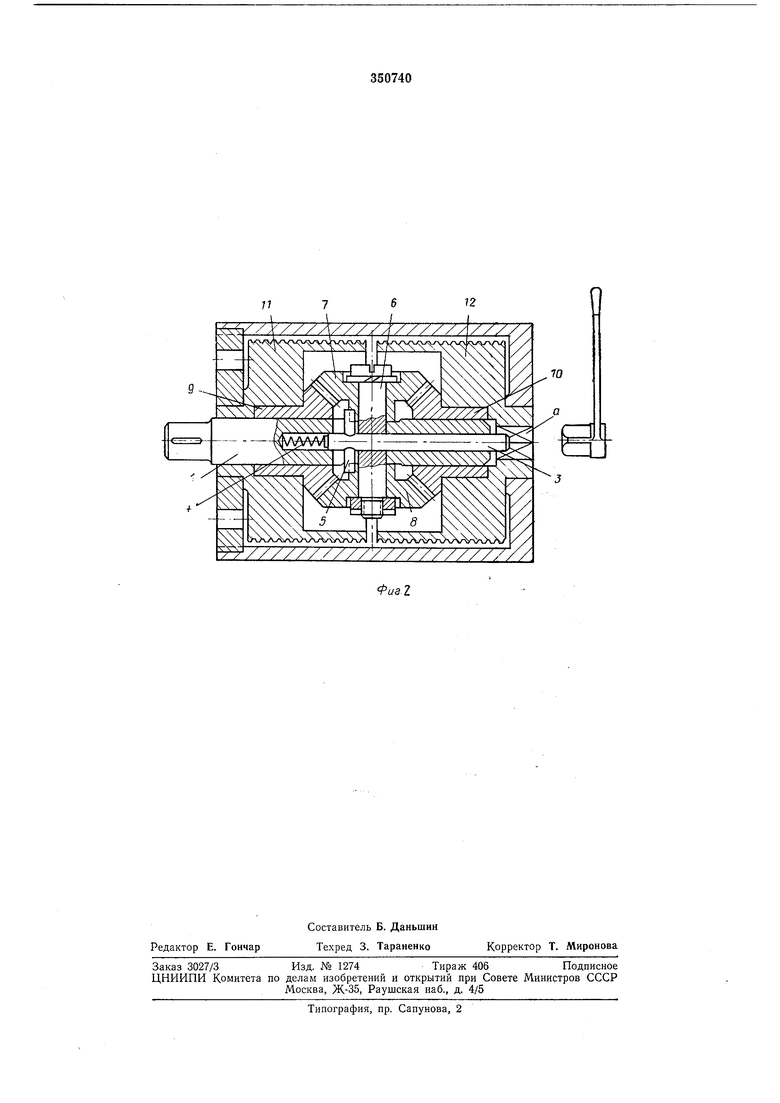
На фиг. 1 - схематически изображено описываемое устройство на фиг. 2 - то же, разрез по А-А на фиг. 1.
Внутри приводного вала 1 лебедки 2 грузоподъемного устройства соосно приводному
валу установлен стержень 3 с пружиной 4 и стопором 5, жестко прикрепленным к стержню. К приводному валу прикреплено водило 6 с коническими шестернями 7, 8, взаимодействующими с коническими щестернями 9, 10,
соответственно правого // и левого 12 барабанов лебедки 2.
Шестерни 9, 10 свободно насажены на приводном валу, при этом левый 12 барабан выполнен с квадратным отверстием а, в которое устанавливается бородка 13 торцового ключа 14.
Захватный орган выполнен в виде подвижного блока 15, соединенного ветвями 16, 17 грузового каната с барабанами лебедки, при
К корпусу 18 захвата осями 20 и 21 поворотно прикреплены рычаги 22 н 23, которые своими пальцами 24, 25 заведены в спиральные канавки бив.
Работа устройства осуществляется следующим образом.
При вращении лриводного вала 1 лебедки 2 вращается водило 6 и конические шестерни 7, 8, 9, 10. Благодаря стопору 5 левый 12 и правый 11 барабаны вращаются в одну сторону и, в зависимости оси направления вращения вала / происходит лодъем или опускание захватного органа.
Управление захватным органом производится при остановленном приводном вале / (движение блокируется). Бородка 13 ключа 14 вставляется в квадратное гнездо а, выводится из зацепления стопор 5 и производится поворот ключа 14, примерно, на 90° {до упора).
При этом один барабан повернется в одну сторону, а другой в противоположную, произойдет перемещение ветвей 16, 17 грузово1го каната с одного барабана на другой, например, при раскрывании рычатов 22, 23 захвата с правого // на левый 12 барабаны. - При этом в захватном органе блок 15 повернется, в пальцы 24, 25 рычагов захватного органа, входящие в спиральные назы б и в, сведут рычаги и захватный орган откроется. Закрывание захватного органа производится обратным движением ключа 14 до упора.
Предмет изобретения
1. Грузоподъемное устройство, содержащее лебедку со свободно вращающимися на приводном валу двумя барабанами, «а которых закреплены концы грузового каната, запасованного путем трособлочной системы одностороннего движения обоих его ветвей, несущих подвижный блок с захватным органом, отличающееся тем, что, с целью обеспечения дистанционного управления захватным органом, барабаны лебедки включены между собой посредством дифференциала, выполненного в виде водила с парой конических щестерен,
взаимодействующих с щестернями барабанов, и кинематически связанного с приводным валом и стопором, смонтированным на подпружиненнном стержне, расположенном соосно внутри приводного вала и соединяющим -
разъединияющим конические щестерни водила с барабанами при подъеме и опускании захватвОГО органа посредством торцового ключа, взаимодействующего с подпружиненным стержнем.
2. Грузоподъемное устройство по п. 1, отличающееся тем, что захватный орган выполнен в виде клеи1ей, в которых на несущих груз плечах рычатов имеются пальцы, западающие в спиральные канавки, выполненные
на подвижном блоке так, что при остановленном приводе поворотом торцового ключа в одну сторону плечи рычагов сближаются, а в другую сторону наоборот расходятся.
13
77
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1989 |
|
SU1724562A1 |
| !::'-гБЛИОТЕКА | 1973 |
|
SU379523A1 |
| Тяговый механизм для грузоподъемной машины | 1979 |
|
SU998308A1 |
| УСТАНОВКА ДЛЯ ВОЗДУШНОЙ ТРЕЛЕВКИ ЛЕСА | 1988 |
|
RU2049716C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ГИБКОГО ЭЛЕМЕНТА | 1992 |
|
RU2031077C1 |
| Лебедка | 1985 |
|
SU1306894A1 |
| ЛЕБЕДКА | 1991 |
|
RU2016835C1 |
| КАНАТОУКЛАДЧИК | 1971 |
|
SU315686A1 |
| Канатный подъемно-транспортный агрегат | 1981 |
|
SU1164117A1 |
| Захват-кантователь | 1982 |
|
SU1031867A1 |