Известно устройство для определения положения рабочего органа роторного экскаватора относительно горизонтальной нлоскости, включающее блок задания опорной плоскости в неподвижной системе координат, соединенный с блоком определения отклонений контрольной точки, и блок определения тангенсов продольного и поперечного углов наклона экскаватора, подключенный к блоку определения аппликаты начала подвижной системы Б неподвижной системе координат. Однако это устройство не обеспечивает непрерывного определения и автоматического контроля величины отклонения рабочего органа от горизонтальной плоскости.
В предлагаемом устройстве в отличие от известного для непрерывного определения и автоматического контроля величины отклонения рабочего органа от горизонтальной плоскости смонтированы блоки определения угла поворота стрелы и угла наклона платформы, блок определения разности аппликат начала подвижной системы координат и горизонтальной ПЛОСКОСТИ, эквидистантной заданной, в неподвижной системе координат, одип вход которого соединен с выходом -блока определения аппликат, блоки определения радиуса поворота центра роторного колеса вокруг осп поворота платформы и заданной высоты подъема центра роторного колеса в подвижной системе координат, связанные с блоком определения разности аппликат, и блок определения отклонения роторного колеса в подвижной системе координат с датчиком действительной высоты подъема центра роторного колеса в подвижной системе координат.
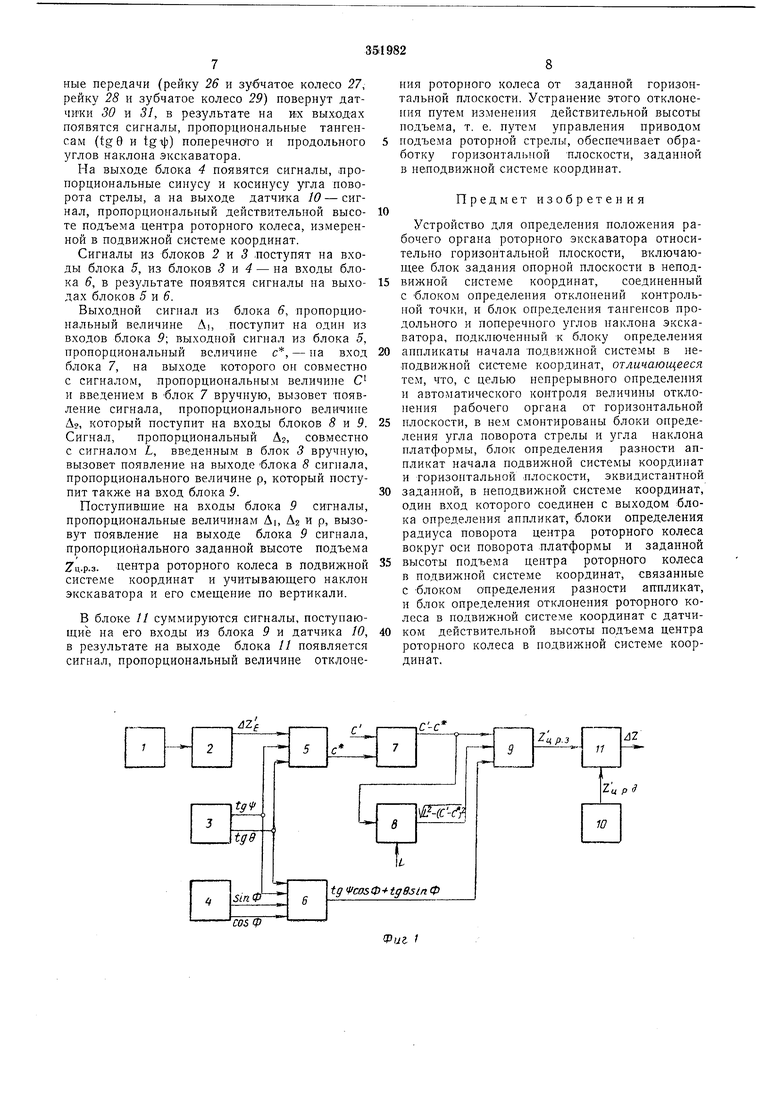
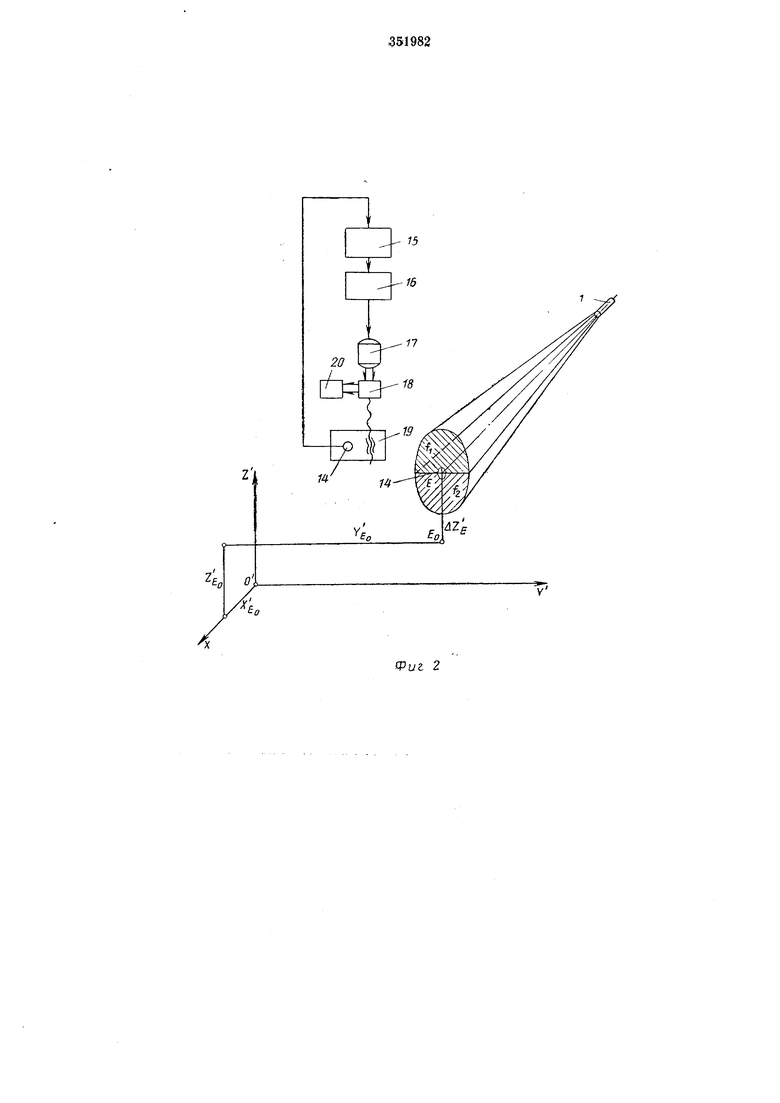
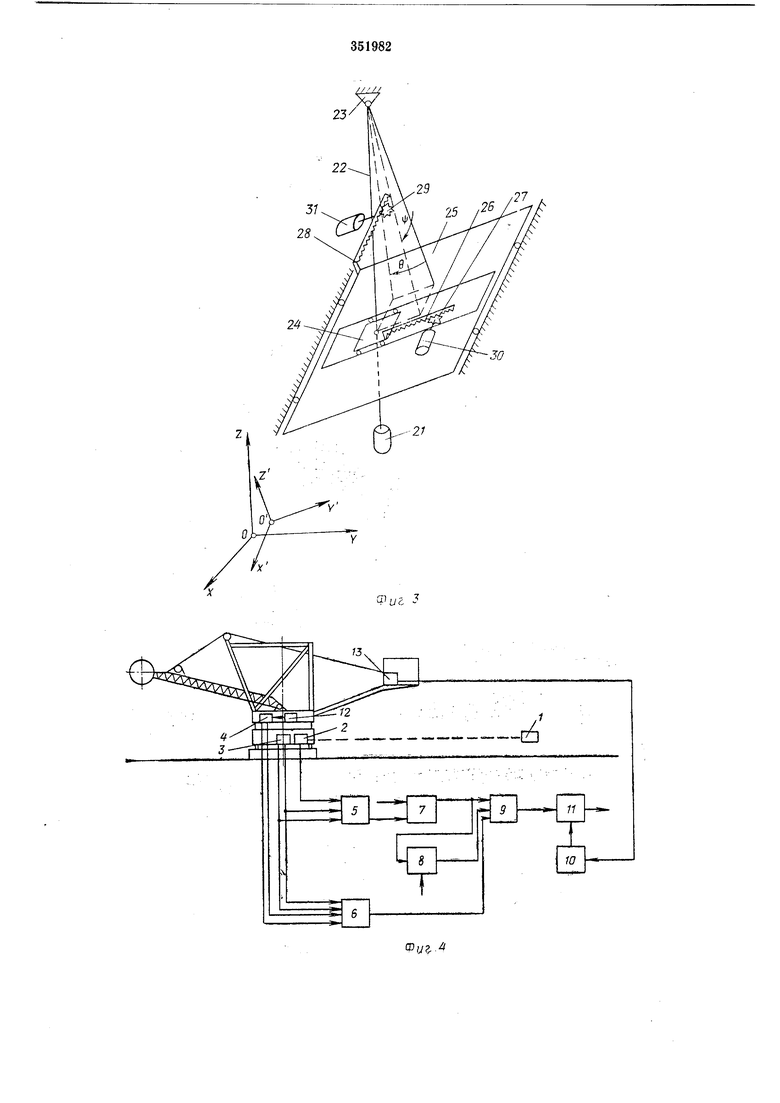
На фиг. 1 изображена блок-схема описываемого устройства; на фиг. 2 - электроме.чаническая схема блока определения отклонений контрольной точки; на фиг. 3 - электромеханическая схема блока определения тангенсов .продольного и поперечного углов наклона экскаватора; на фит. 4 - схема привязки устройства к экскаватору.
Устройство содержит:
блок / задания опорной плоскости в неподвижной системе координат; блок 2 определения отклонений AZ контролируемой точки Е относительно фиксированной точки ЕО по оси OZ;
блок 3 определения тангенсов (tgij) и tg9) продольного и поперечного углов наклона экскаватора;
блок 4 определения синуса (sin ф) и косинуса (созф) угла поворота стрелы;
блок 5 определения аппликаты с начала подвижной системы в неподвижной системе координат; блок 6 определения угла наклона поворотной платформы вдоль роторной стрелы: Aj - tg Ч cos Ф + tg 0 sin Ф, блок 7 определения разности аппликат начала подвилшой системы координат и горизонтальной плоскости, эквидистантной заданной, в неподвижной системе координат: Д.:С-с ; блок о определения радиуса (С-с) поворота центра роторного колеса вокруг оси поворота (платформы; блок 9 онределения заданной высоты подъема 2ц.р.з. центра роторного колеса; датчик 10 действительной высоты подъема ц.р.д. центра роторного колеса в .подвижной системе координат; блок // определения отклонения AZ роторного колеса от заданной горизонтальной плоскости в подвижной системе координат; привод 12 (фиг. 4) поворота стрелы; привод 13 подъема стрелы. Для определения Положения рабочего органа в забое в качестве неподвижной системы координат принимается прямоугольная система OXYZ (фит. 3), ось ОХ которой ориентирована вдоль заходки параллельно заданной траектории движения экскаватора, ось OY - вправо по горизонтали, а ось OZ - вертикально вверх. Подвижная система координат OXYZ, связанная с экскаватором, ориентируется следующим образом оси О Х и ОУ - параллельно плоскости поворотного круга соответственно вперед и влево по отношению к корпусу экскаватора; ось OZ - вверх по оси вращения поворотной платформы. Подлежащая обработке (заданная) горизонтальная плоскость в неподвижной системе координат (в пространстве забоя) описывается уравнением Z C const, где Z-аппликата -произвольной точки заданной горизонтальной плоскости в неподвижной системе координат. Для контроля лоложения рабочего органа (роторного колеса) принимается его дентр. Горизонтальная плоскость, эквидистантная подлежапгей обработке заданной горизонтальной плоскости и удаленная от нее на величину радиуса роторного колеса, посредством координат подвижной системы определяется зависимостью где г - радиус роторного колеса; С - аппликата начала подвижной системы координат в неподвижной системе; П1, П2, «3 - направляющие косинусы углов между осью OZ системы OXYZ и соответственно осями О Х , OY и OZ системы OXYZ; X, У, Z - координаты произвольной точки эквидистантной плоскости в системе координат OXYZ. Допустимые наклоны экскаватора, определяемые его конструкцией, обычно не превышают 2--3°. Путем сравнения заданной аппликаты 2црз с действительной аппликатой 2црд центра роторного колеса определяют величину отклонеПИЯ роторного колеса от заданной горизонтальной плоскости: Л 7 - 77 - .р.з ц.р.д Блок / предназначен для задания опорной плоскости в неподвижной системе координат в виде резко выраженной равносигнальной зоны на границе частей излучаемого им светового пучка, модулированных двумя разными частотами, устанавливается сзади экскаватора на нижней площадке отрабатываемого уступа и представляет собой прожектор устройства ПУЛ-3. Блок 2 (фиг. 2) предназначен для определения отклонений AZf- контролируемой точки Е относительно фиксированной точки 0 (или, что то же самое, смещения точки 0 относительно опорной плоскости) и нредставляет одномерную фотоэлектрическую следящую систему. Блок состоит: из фотоприемника 14, служащего для преобразования оптического сигнала, излучаемого прожектором, в электрический сигнал, который поступает на вход частотно-избирательного усилителя 15, остро настроенного на частоты / и /г; релейного элемента 16; электродвигателя 17, который через редуктор 18 и винтовую передачу соединен с кареткой 19, способной перемещаться параллельно оси OZ, через редуктор электродвигатель соединен также с датчиком 20 смещения точки Е относительно точки EQ лараллельно оси OZ. Этот блок устанавливается на поворотной части экскаватора. Блок 5 предназначен для определения тангенсов продольного и поперечного углов наклона экскаватора и устанавливается на неповоротной ча,сти экскаватора. Блок включает в себя: отвес в виде груза 21, подвешенного с помощью нити 22 к кронштейну 23, закрепленному на неповоротной части экскаватора; каретки 24 и 25, перемещаемые в направляющих параллельно поперечной и продольной осям ОУ и О Х симметрии корлуса экскаватора и подвижно связанные нитью; рейчатое колесо 29, подвижно связанные соответственно с датчиками 30 и 31 тангенсов поперечного и продольного углов наклона экскаватора.
Блок 4 служит для определения синуса и косинуса угла поворота стрелы (поворотной платформы), которая устанавливается на поворотной платформе, представляет собой синусно-косинусный преобразователь угла и соединен с приводом поворота стрелы.
Блок 5 - электромеханическое счетно-решающее устройство на поворотных трансформаторах, решающее и расшифровывающее зависимость
()+Y ig9-Z -AZ.
Один вход блока 5 электрически соединен с выходом блока 2, два других входа - с выходами блока 3.
Блок 6 - электромеханическое счетно-решающее устройство на поворотных трансформаторах, которое решает и расшифровывает зависимость
д tg Ч COS Ф + tg в sin Ф.
Два входа блока 6 электрически соединены с выходами блока 3, два других входа - с выходами блока 4.
Блок 7 - электромеханическое счетно-решающее устройство на поворотных трансформаторах решает и расшифровывает зависимость Д2 С - с. Один вход блока 7 электрически соединен с выходом блока 5, по другому входу вручную вводится сигнал, пропорциональный аппликате С поверхности, эквидистантной заданной, в неподвижной системе координат.
Блок 8 - электромеханическое счетно-решаюшее устройство на поворотных трансформаторах решает и расшифровывает зависимость
(С - с)«.
Один вход блока 8 электрически соединен с выходом блока 7, по другому входу вручную вводится сигнал, пропорциональный длине роторной стрелы.
Блок 9 определения заданной высоты подъема 7ц.р.з. центра роторного колеса представляет собой счетно-решающее устройство на поворотных трансформатора.х, которое решает и расшифровывает зависимость
2д.р.з-Д.-Д:РОдин вход блока 9 электрически соединен с выходом блока 6, другой вход - с выходом блока 7, а следующий с выходом блока 8.
Датчик 10 действительной высоты подъема центра роторного колеса преобразовывает угол поворота вала двигателя подъема стрелы
в величину, пропо)Ш11оналы1ую высоте подъема центра роторного колеса, и связан но входу через следящую снстем с приводом по/гьема стрелы.
Блок // определения отклонения рабочего органа экскаватора от заданной горизонтальной плоскости представляет собой алгебраический сумматор сигналов, поступающих на его входы от блока 9 и датчика 10.
Работает устройство следующ им образом. Перед началом обработки заходки прожектор (блок /) устанавливаки таким образом, чтобы создаваемая им опорная нлоскость в виде равноснгнальной зоны на границе частей излучаемого светового пучка, модулированных двумя разными частотами, была параллельна плоскости вдоль заходки. в которой задана траектор я движения контрольной точки о, а экскаватор ставят так, чтобы ось равносигиальной зоны пучка света, создаваемого блоком /, прошла через рабочий диапазон зоны перемещения фотоприемника 14 блока 2. В блок 7 вручную вводят еигнал, пропорциональный величине С , характеризующей положение обрабатываемой горизонтальной плоскости в неподвил ной системе координат. Величина, пропорциональная конструктивному нараметру, (L - длина стрелы) вводится в блок 8 при первоначальной настройке устройства. После этого устройство вводится в действие.
При отклонении экскаватора от заданной траектории движения в блоке 2 фотоприемник 14 сместится относительно нулевого положения, в результате нарушится равенство количеств энергии, модулированных частотами fi и /2 и иопадающих на фоточувствительный элемент фотоприемника. В зависимости от преобладания на фоточувствительном элементе
энергии той или иной частотно-избирательный усилитель 15, куда поступает сигнал от фотоприемника через релейный элемент 16, включит электродвигатель 17 в направлении, необходимом для восстановления состояния равновесия фотоэлектрической следящей системы. Электродвигатель через редуктор 18 и винтовую передачу переместит параллельно оси OZ каретку 19 до совмещения фотоприемника с опорной плоскостью (равносигнальной
зоной пучка света), проходящей через линию ЕЕо. а также через редуктор повернет в новое положение датчик 20, что вызовет на его выходе появление сигнала, пропорционального смещению AZ фотоприемника и параллельно оси OZ относительно опорной плоскости (равносигнальной зоны), или, что то же самое, пропорционального смещению точки Е относительно точки ЕО также параллельно оси OZ.
В блоке 3 под действием груза 21 нить 22 сместится относительно нулевого положения и нередвинет по направляющим параллельно осям ОУ и О Х соответственно каретки 24
ные передачи (рейку 26 и зубчатое колесо 27, рейку 28 и зубчатое колесо 29) повернут датчики 30 и 31, в результате на их выходах появятся сигналы, пропорциональные тангенсам (tg9 и tgi)j) поперечного и продольного углов наклона экскаватора.
На выходе блока 4 появятся сигналы, .пропорциональные синусу и косинусу угла поворота стрелы, а на выходе датчнка 10-сигнал, пропорциональный действительной высоте подъема центра роторного колеса, измеренной в подвижной системе координат.
Сигналы из блоков 2 и 5 -поступят на входы блока 5, из блоков - на входы блока 6, в результате появятся сигналы на выходах блоков 5 и 5.
Выходной сигнал из блока 6, пропорциональный величине Д), поступит на один из входов блока 9; выходной сигнал из блока 5, пропорциональный величине с, - па вход блока 7, па выходе которого он совместно с сигналом, пропорциональным величине С и введением в -блок 7 вручную, вызовет появление сигнала, пропорционального величине Лг, который поступит на входы блоков S и 9. Сигнал, пропорциональный As, совместно с сигналом L, введенным в блок 5 вручную, вызовет появление на выходе блока 8 сигнала, пропорционального величине р, который поступит также на вход блока 9.
Поступившие на входы блока 9 сигналы, пропорциональные величинам Д|, Л2 и р, вызовут появление на выходе блока 9 сигнала, пропорционального заданной высоте подъема 7ц.р.з. центра роторного колеса в подвижной системе координат и учитывающего наклон экскаватора и его смещение по вертикали.
В блоке // суммируются сигналы, поступающие на его входы из блока 9 и датчика 10, в результате на выходе блока // появляется сигнал, пропорциональный величине отклонения роторного колеса от заданной горизонтальной плоскости. Устранение этого отклонения путем изменения действительной высоты подъема, т. е. путем управления приводом подъема роторной стрелы, обеспечивает обработку горизонтальной плоскости, заданной в неподвижной системе координат.
Предмет изобретения
Устройство для определения положения рабочего органа роторного экскаватора относительно горизонтальной плоскости, включающее блок задания опорной плоскости в неподвижной системе координат, соединенный с блоком определения отклонений контрольной точки, и блок определения тангенсов продольного и поперечного углов наклона экскаватора, подключенный к блоку определения аппликаты начала подвижной системы в неподвижной системе координат, отличающееся тем, что, с целью непрерывного определения и автоматического контроля величины отклонения рабочего органа от горизонтальной плоскости, в нем смонтированы блоки определения угла поворота стрелы и угла наклона платформы, блок определения разности аппликат начала подвижной системы координат и горизонтальной .плоскости, эквидистантной заданной, в неподвижной системе координат, один вход которого соединен с выходом блока определения аппликат, блоки определения радиуса поворота центра роторного колеса вокруг оси поворота платформы и заданной высоты подъема центра роторного колеса в подвижной системе координат, связанные с блоком определения разности аппликат, и блок определения отклонения роторного колеса в подвижной системе координат с датчиком действительной высоты подъема центра роторного колеса в подвижной системе координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КАРЬЕРНОГО ЭКСКАВАТОРА В ПРОСТРАНСТВЕ | 1972 |
|
SU336400A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU294907A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| СПОСОБ СОЗДАНИЯ ИНЕРЦИОННЫХ ОДИНАКОВЫХ ПО ВЕЛИЧИНЕ ИМПУЛЬСОВ В ЗАДАННОМ КООРДИНАТНОМ НАПРАВЛЕНИИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1994 |
|
RU2083419C1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО ОРГАНА РОТОРНОГО ЭКСКАВАТОРА ОТ ГОРИЗОНТАЛЬНОЙПЛОСКОСТИ | 1972 |
|
SU323510A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
V
Фиг 2
