Известно устройство для управления роторным экскаватором, включающее следящие приводы подъема и поворота роторной стрелы, преобразователь угла поворота следящего привода подъема роторной стрелы и механизм сравнепия заданных и действительных аппликат центра роторного колеса.
Целью изобретения является повышение точности управления роторным экскаватором. Достигается это тем, что устройство выполнено с функциональными механизмами, ставящими в соответствие аппликате центра роторного колеса радиус поворота центра роторного колеса и формирующими заданные аппликаты центра роторного колеса, вход одного из которых соединен с выходом преобразователя угла поворота следящего привода подъема роторной стрелы, причем выходы одного из функциональных механизмов и преобразователя угла новорота следящего привода подъема роторной стрелы соединены со входом механизма сравнения, выход которого соединен со входом следящего привода подъема роторной стрелы.
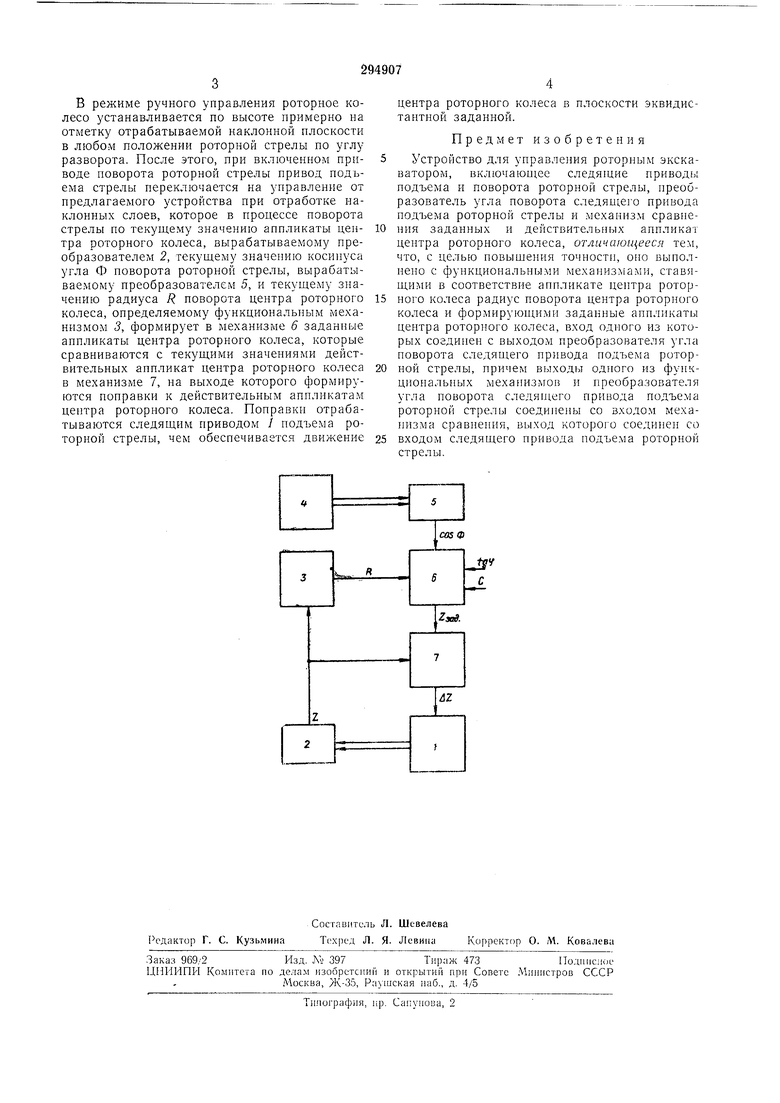
На чертеже представлена блок-схема устройства.
вода подъема роторной стрелы в аппликату центра роторного колеса; функционального механизма 5, ставящего в соответствие аппликате Z центра роторного колеса радиус R поворота центра роторного колеса, вход которого электрически соединен с преобразователем 2 следящего привода 4 поворота роторной стрелы, выход которого соедппен механической передачей с преобразователем 5 угла поворота следящего привода 4 в косинус угла поворота роторной стрелы, функционального механизма 6, ф)ормирующего заданные аппликаты центра роторного колеса но зависимости
1§фсозф-С,
входы которого электрически соединены с выходами функционального механизма 3, преобразователя 5 и задатчиков угла наклона 1§ф и величины С - постоянных параметров, .характеризующих заданную наклонную плоскость; механизма 7 сравнения действительных и заданных аппликат центра роторного колеса, входы которого электрически соединены с выходами преобразователя 2 и функциональпого механизма 6, а выход--со входом следящего прпвода / подъема роторной стрелы.
Тангенс угла наклона tgcp и величииы С вводятся в блок в виде калиброванных вставок.
В режиме ручного управления роторное колесо устанавливается по высоте примерно на отметку отрабатываемой наклонной плоскости в любом положении роторной стрелы по углу разворота. После этого, при включенном приводе поворота роторной стрелы привод подъема стрелы переключается на управление от предлагаемого устройства при отработке наклонных слоев, которое в процессе поворота стрелы по текущему значению аппликаты центра роторного колеса, вырабатываемому преобразователем 2, текупдему значению косинуса угла Ф поворота роторной стрелы, вырабатываемому преобразователем 5, и текущему значению радиуса R поворота центра роторного колеса, определяемому функциональным механизмом 3, формирует в механизме 6 заданные аппликаты центра роторного колеса, которые сравниваются с текущими значениями действительных аппликат центра роторного колеса в механизме 7, на выходе которого формируются поправки к действительным аппликатам центра роторного колеса. Поправки отрабатываются следящим приводом / подъема роторной стрелы, чем обеспечивается движение
центра роторного колеса в плоскости эквидистантной заданной.
Предмет изобретения
Устройство для управления роторным экскаватором, включаюо1ее следящие приводы подъема и поворота роторной стрелы, преобразователь угла поворота следящего привода подъема роторной стрелы и механизм сравнения заданных и действительных аппликат центра роторного колеса, отличающееся тем, что, с целью повыщения точности, оно выполнено с функциональными механизмами, ставящими в соответствие аппликате центра роторного колеса радиус поворота центра роторного колеса и формируюн1ими заданные аппликаты центра роторного колеса, вход одного из которых соединен с выходом преобразователя угла поворота следящего привода подъема роторной стрелы, причем выходы одного из функциональных механизлгов и преобразователя угла поворота следящего привода подъема роторной стрелы соедипещз со входом механизма сравнения, выход которого соединен со входом следящего привода подъема роторной стрелы.
Usf
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО | 1972 |
|
SU351982A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ СТРЕЛЫ ОТВАЛООБРАЗОВАТЕЛЯ ПОРОДОЙ | 1973 |
|
SU386098A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Устройство автоматического управления роторным экскаватором | 1975 |
|
SU563459A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU326315A1 |
| Устройство автоматического управления экскаватором | 1977 |
|
SU763530A1 |
