шкивов ( условная ось стрелы;;f,.,j- длины свешивающихся частей
подьемного и тягового канатов EJ. - угол наклона условной оси
стрелы к горизонту; п угол наклона поворотной платформы к горизонту в плоскости стрелы; координаты i-й точки стояния.
координаты начала системы координат в плоскости стрелы;
средние и номинальные токи якорных цепей приводов тяги и подъема ковша, поворота платформы; угол между свешивающейся частью тягового каната и горизонталью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1984 |
|
SU1219754A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭКСКАВАТОРА-ДРАГЛАЙНА В ПРОСТРАНСТВЕ, основанный на измерении угла наклона вертикальной плоскости поворотной платформы экскаватора в направлении оси выработки и вычислении координат очередной точки стояния экскаватора, отличающийся тем, что, с целью упрощения и повышения точности определения координат экскаватора, располагают вертикальную плоскость стрелы экскаватора вдоль оси выработки, а груженый ковш - в зоне очередной точки стояния, измеряют токи в якорных цепях двигателей механизмов тяги ковша, подъема ковша и поворота платформы, длины свешивающихся частей тягового и подъемного канатов, вычисляют фактические значения координат v и Uj,- ковша в плоскости стрелы по формулам V2 (р1 „2 rV Т. (с--е„,| Л .(iMik I V 2L S( при одновременном вьтолнении условий .ном -. .0,7Э (Л п п. ном . о,и с пов пов.ном г .TU i e,..0,7U ; , по вычисленным значениям сооружают очередную точку стояния, перемещают в нее экскаватор, располагают 00 груженый ковш в прежней точке стоясд ния и фактическое значение t и а и ; очередной точки стояния вычисляют по формулам . ; uf и -и tu 1 1 с -к ,Гп- высота и радиус вращения точки схода подъемного каната с направляющих шкивов ;1 L, - расстояние между точками схода тягового и подъемно го канатов с направляющих
Изобретение относится к измеренйю технологических параметров проведения вскрышных бестранспортных работ с использованием экскаваторовдраглайнов.
Известны способы, реализуемые устройством С11 для определения положения карьерного экскаватора в про странстве и устройством 2} для определения положения экскавационной машины в пространстве.
Известные способы не позволяют оперативно и без значительных затрат времени на выполнение дополнительных операций, а также с достаточной точностью определять положение экскаватора в трехмерном пространстве.
Наиболее близким к предлагаемому по технической сущности является способ Цз} определения положения экскаватора-драглайна в пространстве, основанный на измерении угла наклона вертикальной плоскости поворотной платформы экскаватора в направлении оси выработки и вычислении координат очередной точки стояния экcicaBaTopa по формуле
де hp - начальное значение аппликаты;(| - перемещение экскаватора;
Eniугол наклона плоскости плат формы в точке стояния после завершения -го шага, отмеренный от горизонтальной ли НИИ против часовой стрелки; К - порядковый номер точки стоян.чя.
При этом измеряют также перемещение экскаватора вдоль выработки.
Измерение угла наклона плоскости платформы производят при поднятых опорах, а измерение перемещения экскаватора - при включенном приводе механизма шагания.
Известный способ позволяет опре делять координату вдоль оси выработки и аппликату, при этом определение указанных координат осуществляется в процессе перемещения экскаватора. Таким образом, известный способ требует значительного времени для проведения вспомогательных работ, связанных с определением координат точки стояния, поскольку измерение их значений производится только после установки экскаватора в точку стояния. При расхождении фактических и заданных значений координат необходимо вновь переместить экскаватор с точки стояния и произвести соответствующие горные рабо ты. Следовательно,в этом случае имеют место непроизводительные ( вспомогательные J работы, которые существенно влияют на эксплуатационную производительность экскаватора. Кроме того, при использовании способа возможна значительная погрешность измерения координат из-за накопления ошибки в процессе измерения, особенно при корректировке коорди5 нат очередной точки стояния с производством соответствующих горных ра-. бот.
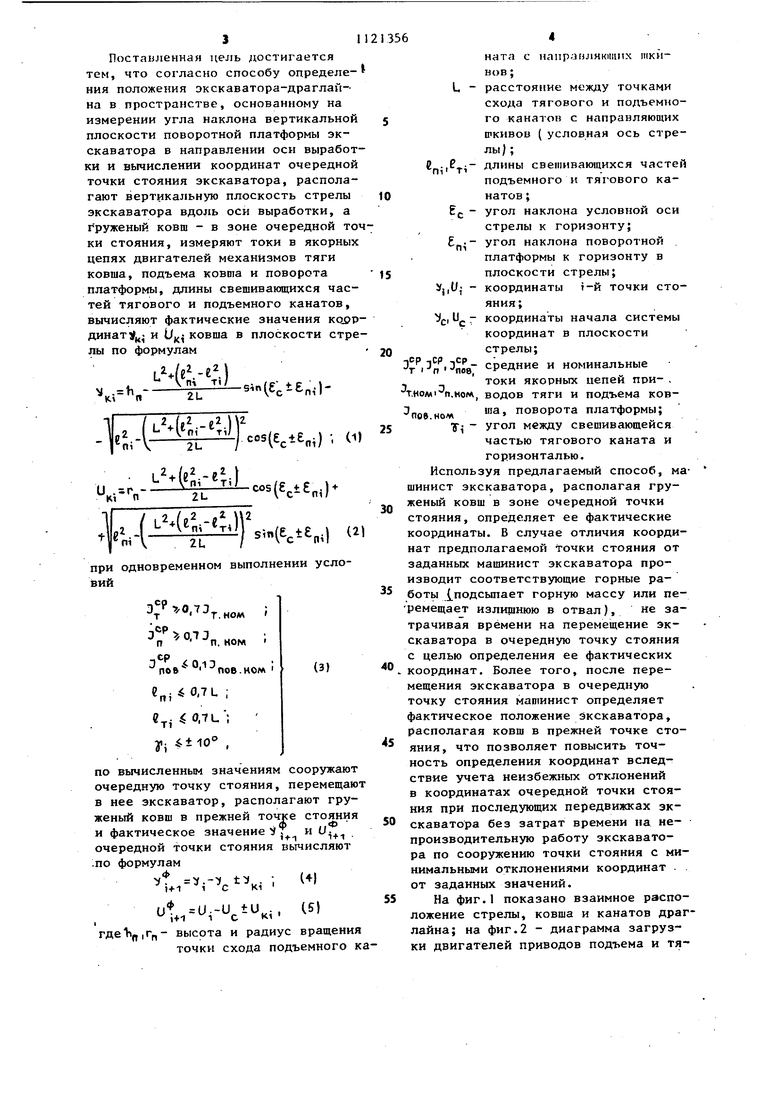
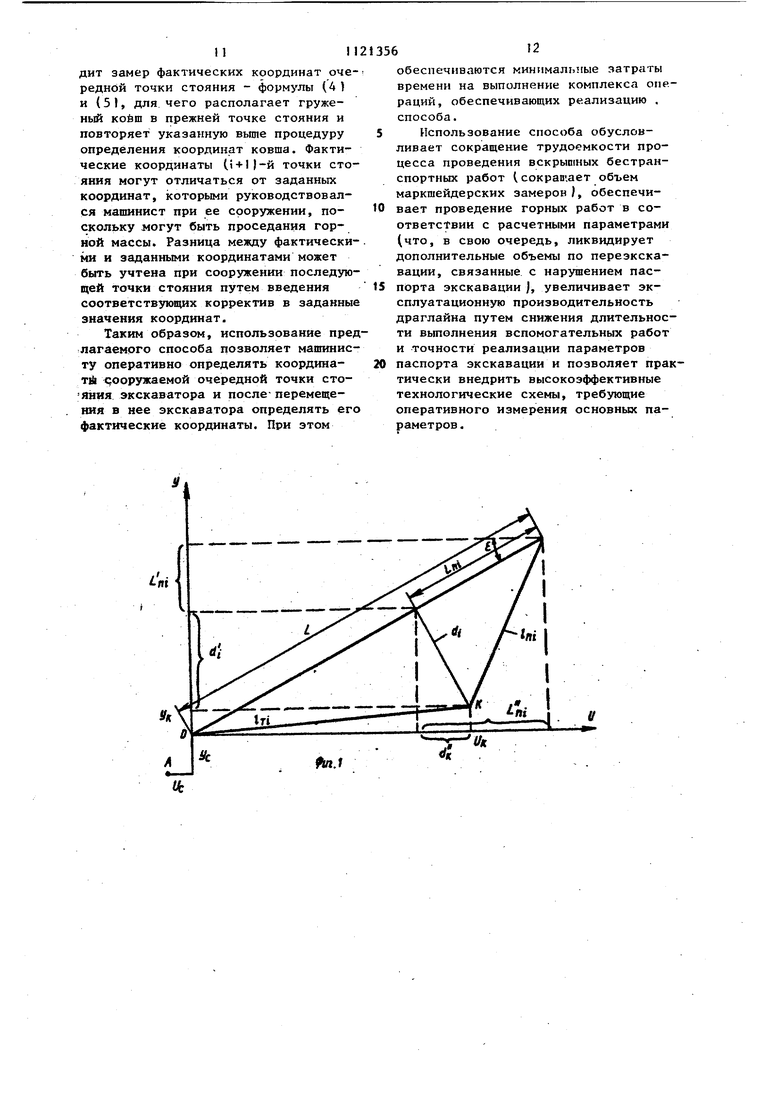
Цель изобретения - упрощение и по0 вьппение точности определения координат экскаватора. 3 Постаиленная цель достигается тем, что согласно способу определе ния положения экскаватора-драглайна в пространстве, основанному на измерении угла наклона вертикально плоскости поворотной платформы экскаватора в направлении оси вырабо ки и вычислении координат очередно точки стояния экскаватора, распола гают вертикальную плоскость стрелы экскаватора вдоль оси выработки, а груженый ковш - в зоне очередной т ки стояния, измеряют токи в якорны цепях двигателей механизмов тяги ковша, подъема ковша и поворота платформы, длины свешивающихся час тей тягового и подъемного канатов, вычисляют фактические значения Kojo динат ц. и U ковша в плоскости стр лы по формулам «Г,М ,-).1/.2 (Л e2)U Sri- %) .) . с fe-er и 5Г 1сРЧЯ-(с-„0 U при одновременном выполнении условийD,P.O,73,, .ном ; пов .иом i ,7и ; . , по вычисленным значениям сооружают очередную точку стояния, перемещают в нее экскаватор, располагают груженый ковш в прежней точке стояния и фактическое значение Vj и U очередной точки стояния вычисляют .по формулам t-, . ,- высота и радиус вращения точки схода подъемного ка 564 нага с иштропляюпптх пгкйнов;U - расстояние между точками схода тягового и подъемного канатов с направляющих шкивов ( условная ось стрелы); длины свешивающихся частей подъемного и тягового канатов;f с угол наклона условной оси стрелы к горизонту; п угол наклона поворотной платформы к горизонту в плоскости стрелы; Jj.U, - координаты т-и точки стояния;С1 координаты начала системы координат в плоскости стрелы; средние и номинальные j токи якорных цепей при- , Т.НОАЛ1 п.ном, водов тяги и подъема ковпов.нол поворота платформы; Ti - угол между свешивающейся частью тягового каната и горизонталью. Используя предлагаемый способ, машинист экскаватора, располагая груженый ковш в зоне очередной точки стояния, определяет ее фактические координаты. В случае отличия координат предполагаемой точки стояния от заданных машинист экскаватора производит соответствующие горные работы подсыпает горную массу или перемещае т излищнюю в отвал), не затрачивая времени на перемещение экскаватора в очередную точку стояния с целью определения ее фактических координат. Более того, после перемещения экскаватора в очередную точку стояиия машинист определяет фактическое положение экскаватора, располагая ковш в прежней точке стояния, что позволяет повысить точность определеиия координат вследствие учета неизбежных отклонений в координатах очередной точки стояния при последующих передвизкках зкскаватора без затрат времени на непроизводительную работу экскаватора по сооружению точки стояния с минимальными отклонениями координат . от заданных значений. На фиг.1 показано взаимное расположение стрелы, ковша и канатов драглайна; на фиг.2 - диаграмма загрузки двигателей приводов подъема и тя}П
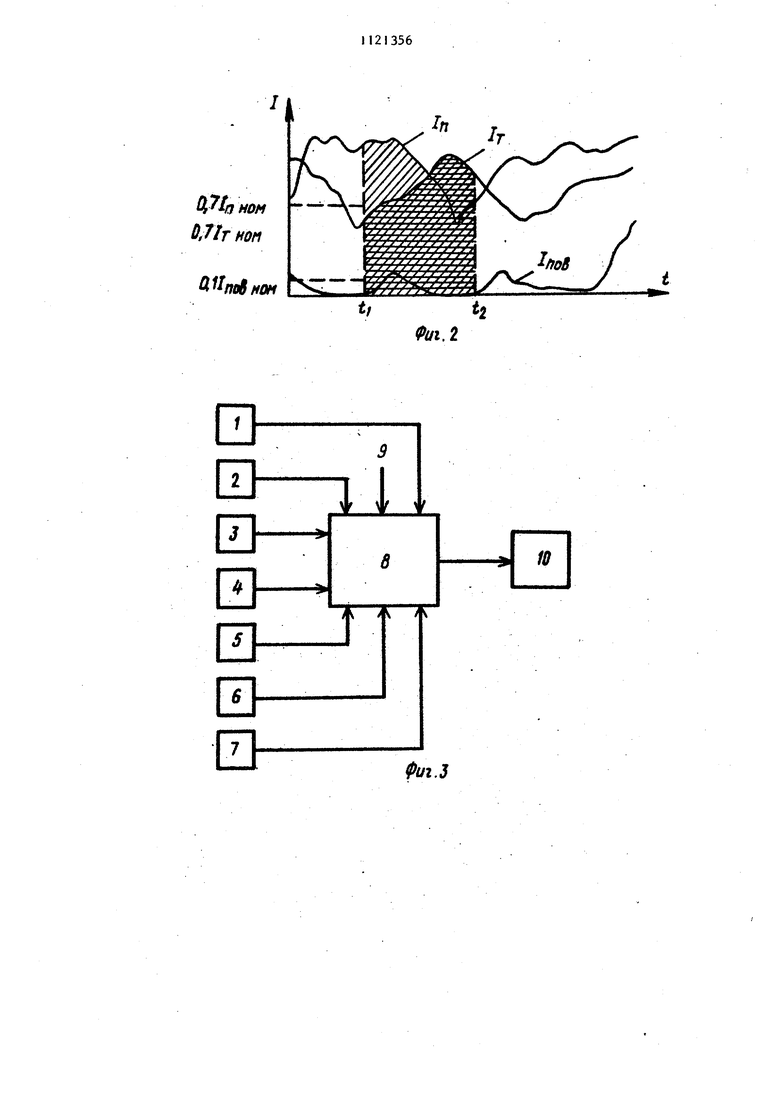
ги ковша; на фиг.З - структурная схема устройства, осуществляющего предлагаемый способ; на фиг.4 - конфигурацня зоны возможных измерений.
Способ осуществляется следующим образом.
Располагают вертикальную йлоскост стрелы экскаватора вдоль оси выработки, т.е. поворачивают платформу так что , где uL- угол между вертикальной плоскостью стрелы экскаватора и осью выработки.
Измеряют токи в якорных цепях двигателей механизмов тяги Э и подъема3f,; ковша, поворота3 „ . платформы, а также длины свешивающихся частей тягового подъемного „ канатов.
Вычисляют фактические значения координат ковша в плоскости стрелы по формулам (U и 2 при одновременном выполнении условий (3 .
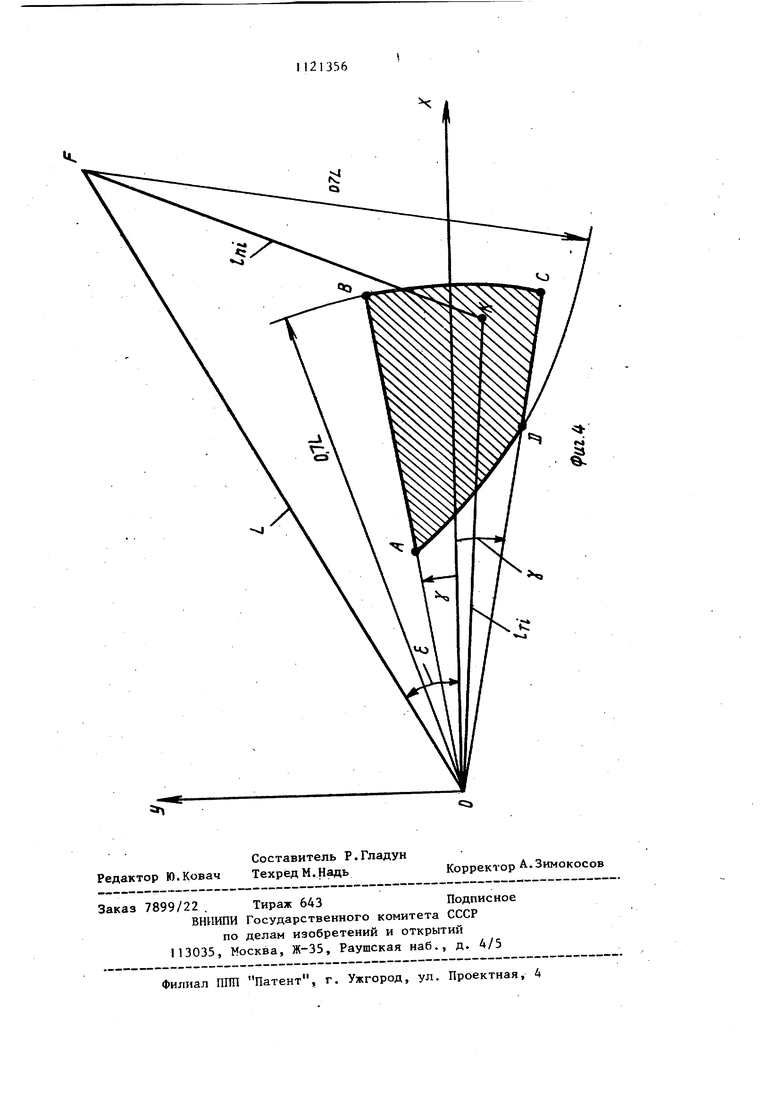
Условия ,7Ь П ,7t } (а| т;, tlO J
определяют зону возможных измерений координат ковша, а следовательно, и координат точки пространства, находящейся в зтой зоне. На фиг.4 по1356
казано расположение зоны ABCD в плоскости стрелы. Условия
iCP
,7Э.„,|
3 0,7J
(Б) п П.НСНА
определяют допустимые провисания тягового и подъемного канатов в зоне ABCD под действием собственного веса.
Условие
.Чов.иом (« определяет практическое нахождение
свисающих частей тягового и подъемного канатов в вертикальной плоскос ти стрелы, при котором угол между вертикальной плоскостью и плоскость в которой расположены свнсающие части тягоВого и подъемного канатов не превмпает 3.
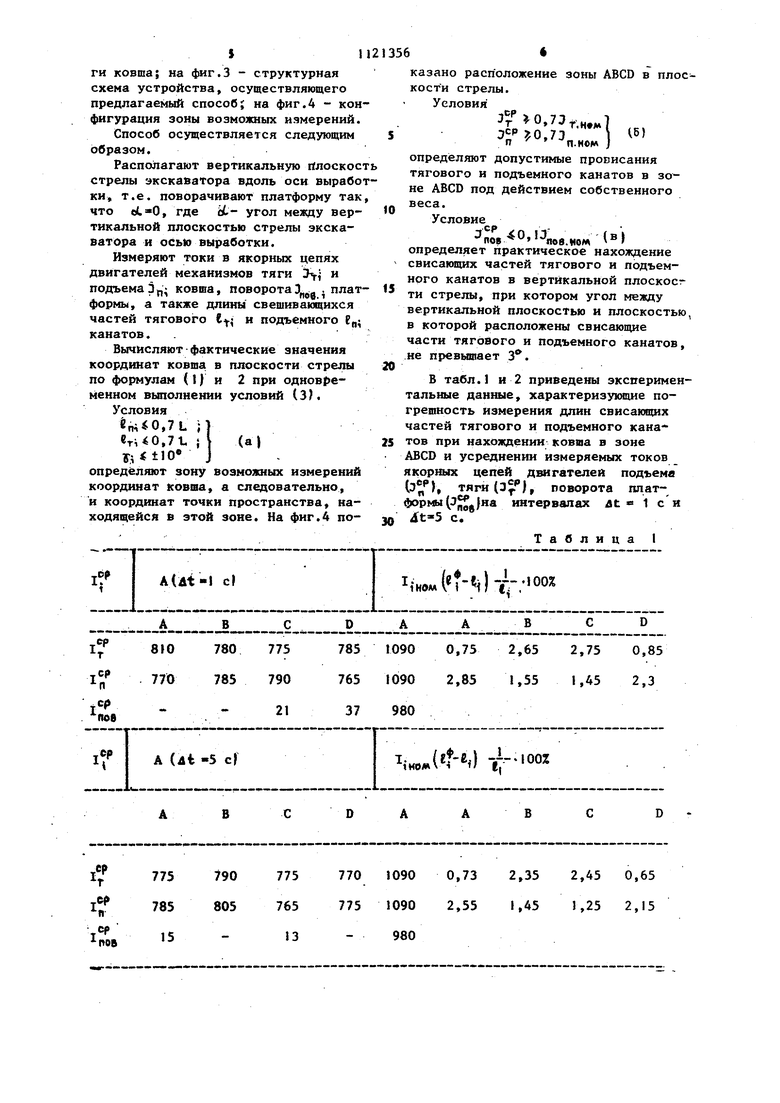
В табл. и 2 приведены экспериметальные данные, характеризующие погрешность измерения длин свисающих частей тягового и подъемного KaHa- тов при нахождении-ковша в зоне ABCD и усреднении измеряемых токов якорных цепей двигателей подъема (з), тяги(), поворота платформы (J)Ha интервалах At « 1 с и t-5 с.
Таблица 1
D
1370 1950
1410
1380
1420
1385 1950 1390 1375
1390
23 1030
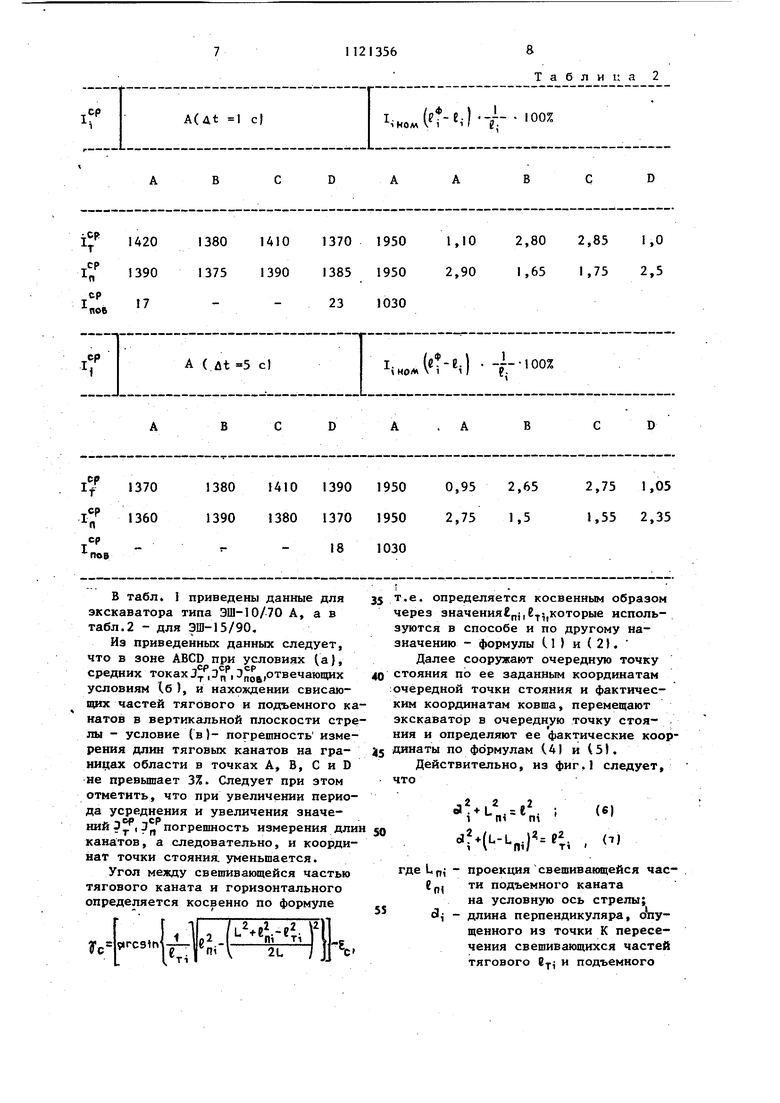
17 В табл. J приведены данные для экскаватора типа ЭШ-10/70 А, а в табл.2 - для ЭШ-15/90, Из приведенных данных следует, что в зоне ABCD при условиях (а), средних токах ,3p, ,отвечающих условиям (б ), и нахождении свисающих частей тягового и подъемного ка натов в вертикальной плоскости стре лы - условие (в)- погрешность измерения длин тяговых канатов на границах области в точках А, В, С и D не превышает 3%. Следует при этом отметить, что при увеличении периода усреднения и увеличения значений „ погрепшость измерения дли канатов, а следовательно, и координат точки стояния, уменьшается. Угол между свешивающейся частью тягового каната и горизонтального определяется косвенно по формуле ..hfc|i: 4SI
Т а б л и II а 2
D
1,10 2,80 2,85 1,0 2,90 1,65 1,75 2,5 т.е. определяется косвенным образом через значения р},8.|Которые используются в способе и по другому назначению - формулы С 1 ) и ( 2 . Далее сооружают очередную точку стояния по ее заданным координатам очередной точки стояния и фактическим координатам ковша, перемещают экскаватор в очередную точку стояния и определяют ее фактические координаты по формулам (41 и (5J. Действительно, из фиг.1 следует, что « VL-nr- i (« ()- т, . гдеЦр,- - проекция свешивающейся час8р1 ти подъемного каната на условную ось стрелы; о1 - длина перпендикуляра, (пущенного из точки К пересечения свешивающихся частей тягового B-j- и подъемного
Р,
канатов из условную
П1
ось стрелы. Из (6) следует, что drfei-L а из (6 ) и (7 0 I - Ч т; п 21 Из фнг.1 видно, что к. или можно записать (2} , (13) Учитывая, что . ., где „угол наклона поворотной платформы к горизонту в плоскости стрелы, и выражения (7) и 18), получаем для :(, и икгвыражения (1) и (2). Определение координат VM.,- положения ковша производят при минималь ных провисаниях тягового и подъемного канатов и нахождении свисающих частей тягового и подъемного канатов в вертикальной плоскости стрелы что обеспечивается одновременным вы полнением условий (З). На фиг.2 приведены кривые измене ния токов приводов подъема , тяги .ЗУ , поворотаО дд во времени. Кривые имеют нестационарный характер и зависят от многих факторов. Однако средние величины загрузки Приводов на определенном интервале tj -t позволяют контролировать провисание канатов. Установлено, что-в реальных условиях провисанием канатов можно пренебречь при нахождении ковша от блоков наводки на расстоянии не более чем 0,71. , где Lрасстояние между точками схода тяго вого и подъемного канатов с направляющих шкивов., при этом отклонение струны тягового каната от горизонтальной плоскости не должно превышать tlO®, тяговые и подъемные канаты должны иметь достаточное натяжение, а двигатель механизма поворо та практически не нагружен. . Средние значения токов в этом сл чае могут быть определены по формуле
J,dt Jf где 3 - якорный ток соответствующего привода; период интегрирования, который принимается в пределах 1-5 с. и обеспечивает достаточное затухание колебателЬных процессов в системе ковш-канаты-стрела-привод. Устройство для осуществления предлагаемого способа (фиг.З) содержит датчик I наклона поворотной платформы, датчик 2 направления оси выработки, датчики 3-5 токов двигателей механизмов тяги, подъема, ковша и поворота поворотной платформы экскаватора и датчика 6 и 7 длин тягового и подъемного канатов. Датчики 1-7 подключены к соответствующим входам вычислителя 8, к выходу которого подключено видеоконтрольное устройство 10. Устройство работает следующим образом. При необходимости определения координат очередной точки стояния машинист экскаватора, руководствуясь показаниями датчика 2, разворачивает поворотную платформу так, что вертикальная плоскость стрелы совпадает с продольной осью выработки, а затем располагает груженый ковш в непосредственной близости от очередной точки стояния . На выходах датчиков 1-7 вырабатываются соответствующие сигналы, которые поступают на вычислитель 8. По команде машиниста экскаватора, поступающей по цепи 9, вычислитель определяет координаты , и ковша по формулам (1) и ( 2) и соблюдении условий (3 ). Значения , индицируются на видеоконтрольном устройстве 10. Машинист экскава-. тора. Сопоставляя координаты положения ковша с заданными координатами очередной точки стояния, производит соответствующие горные работы по сооружению указанной точки стояния. При необходимости машинист повторяет процедуру определения координаты ковша. После сооружения очередной точки стояния и перемещения в нее экскаватора машинист производит замер фактических координат очередкой точки стояния - формулы (4 и (51, для. чего располагает груженый ковш в прежней точке стояния и повторяет указанную выше процедуру определения координат ковша. Фактические координаты 11+1)-й точки стояния могут отличаться от заданных координат, которыми руководствовался машинист при ее сооружении, поскольку могут быть проседания горной массы. Разница между фактическими и заданными координатами может быть учтена при сооружении последующей точки стояния путем введения соответствующих корректив в заданные значения координат.
Таким образом, использование предлагаемого способа позволяет машинисту оперативно определять координатй сооружаемой очередной точки стояния экскаватора и после- перемещения в нее экскаватора определять его фактические координаты. При этом
обеспечиваются минимальные затраты времени на выполнение комплекса операций, обеспечивающих реализацию . способа.
Использование способа обусловливает сокращение трудоемкости процесса проведения вскрышных бестранспортных работ ( сокрав.ает объем маркшейдерских замеров), обеспечивает проведение горных работ в соответствии с расчетными параметрами (что, в свою очередь, ликвидирует дополнительные объемы по переэкскавации, связанные с нарушением паспорта экскавации ), увеличивает эксплуатационную производительность драглайна путем снижения длительности вьтолнения вспомогательных работ и точности реализации параметров
паспорта экскавации и позволяет практически внедрить высокоэффективные технологические схемы, требующие оперативного измерения основных параметров.
n ном J7lT Hon
x-r:
HOM
Li
шщж
fi. . Ili.
Y./ ........л V/. ///// .
//..//// Л
Y//////////// V //f// / /. / f/ ////. , ,tf,./,
tj fjiiflflflflff
Фиг,1
W
f i
фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КАРЬЕРНОГО ЭКСКАВАТОРА В ПРОСТРАНСТВЕ | 0 |
|
SU336400A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
