Изобретение относится к контролю параметров выполненной работы и управления экскаватором-драглайном при ведении открытых горных работ.
Цель изобретения - повьш1ение точности управления разгрузкой ковша путем определения зоны разгрузки ковша при одновременном его упрощении.
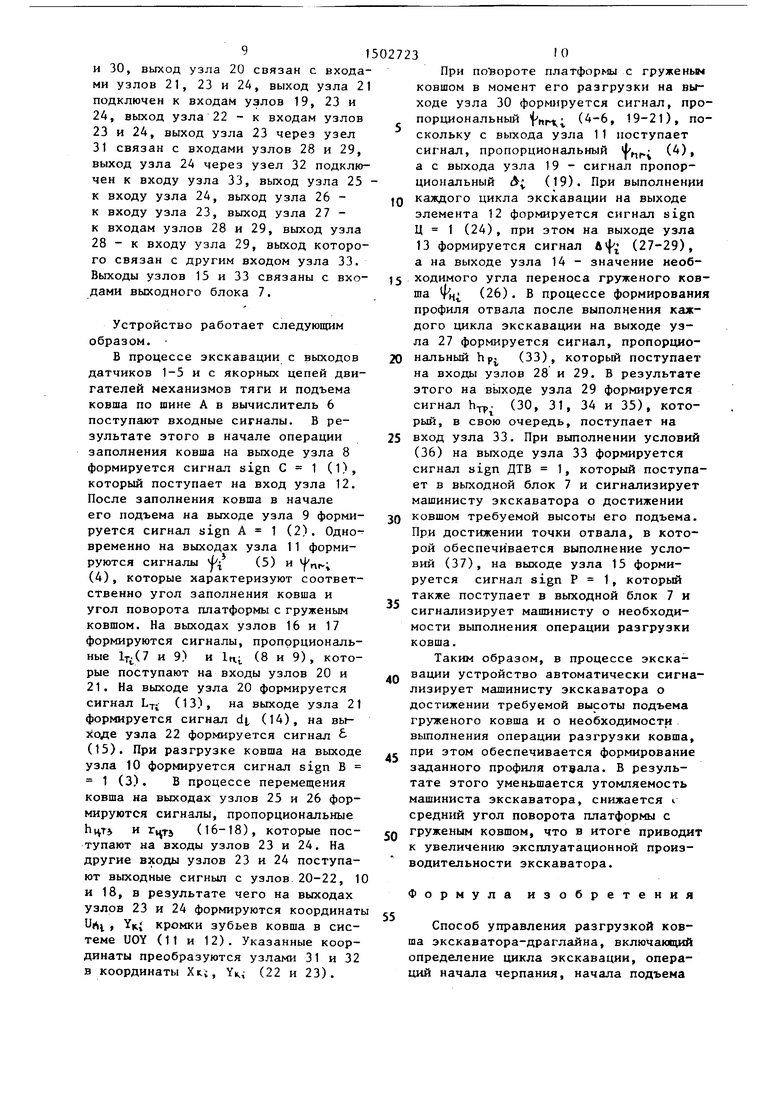
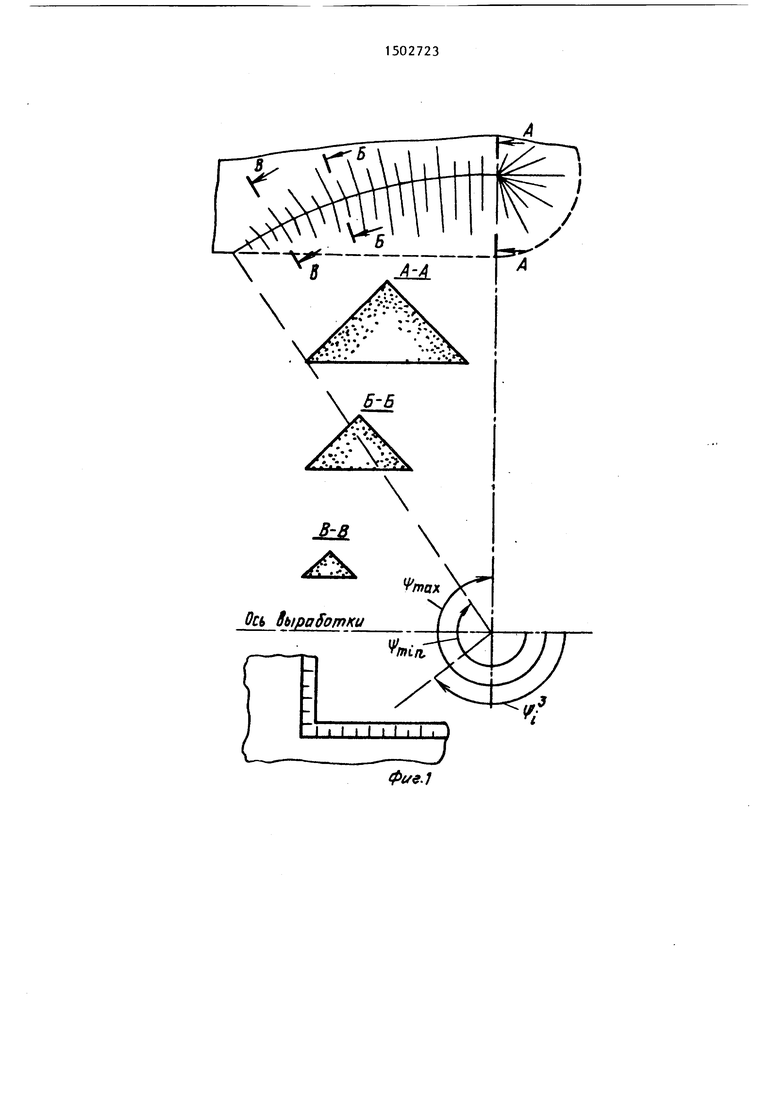
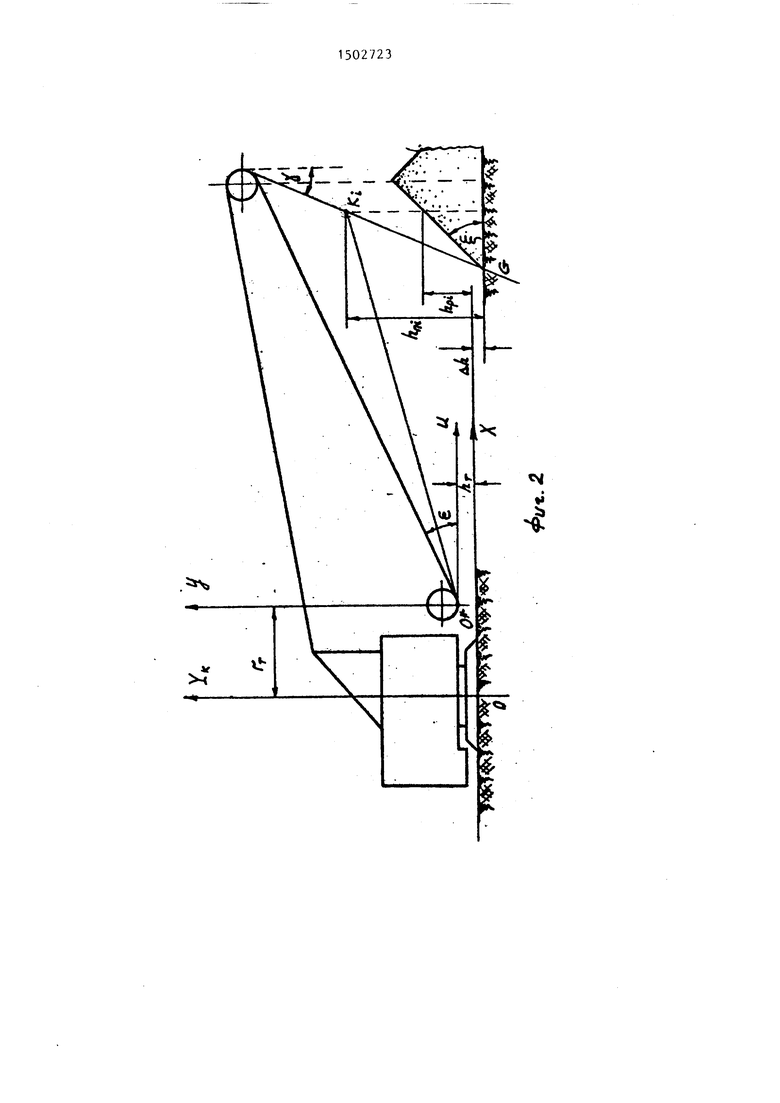
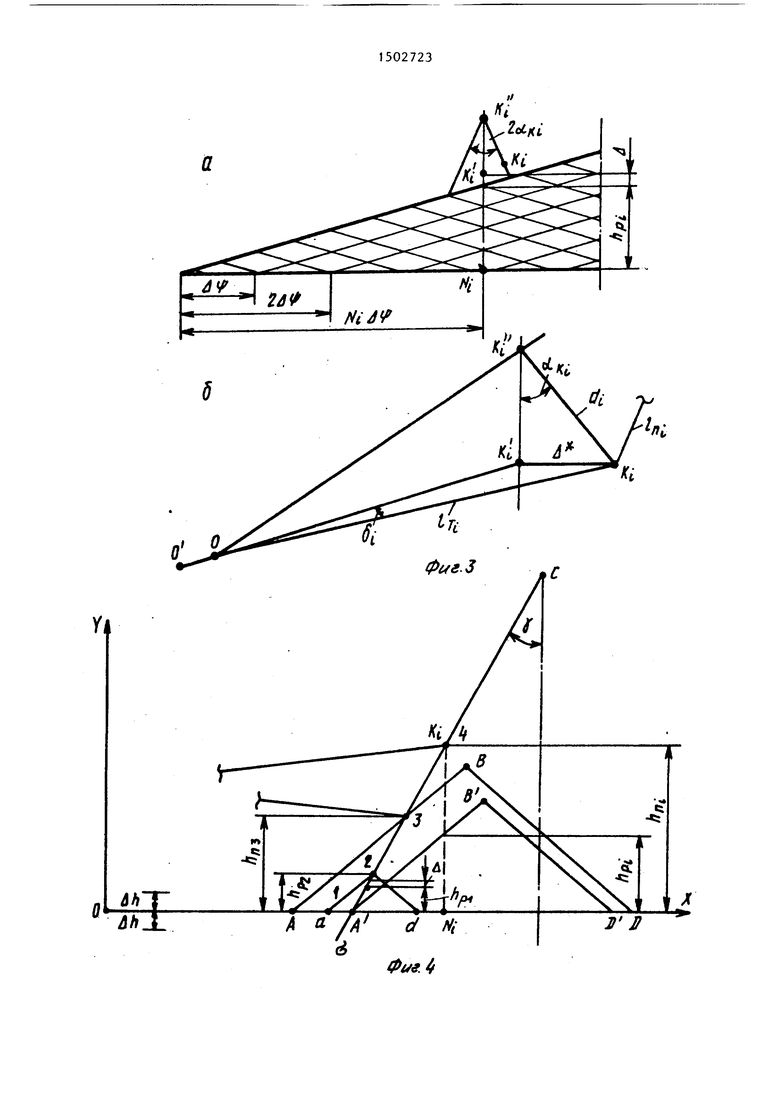
На фиг. 1 приведена схема формирования отвала план и разрезы А-А, Б-Б и В-В; на фиг. 2 - схема взаимосвязи параметров экскаватора и отвала; на фиг. 3 - расчетная схема вычисления угла поворота платформы с груженым ковшом; на фиг. 4 - расчетная схема вычисления высоты подъема ковша в точке разгрузки; на фиг. 5 - структурная схема системы, реализующей способ управления разгрузкой ковша экскаватора-драглайна; на фиг. 6 и 7 - структурная схема вычислителя системы.
В процессе экскавации измеряют токи якорных цепей двигателей механизмов тяги IT-; и подъема „; ковша,
3 . 1502723-4
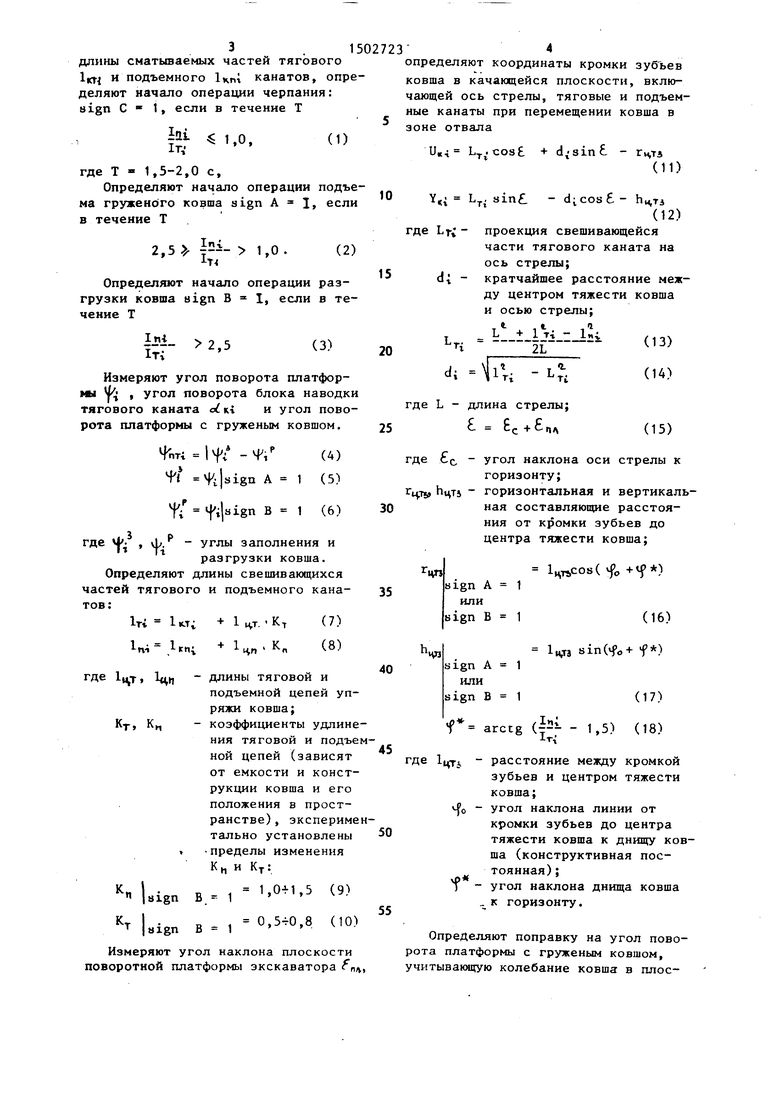
длины сматываемых частей тягового определяют координаты кромки зубьев 1|ст и подъемного 1кпг канатов, опре- ковша в качающейся плоскости, включающей ось стрелы, тяговые и подъемные канаты при перемещении ковша в
деляют начало операции черпания: aign С i, если в течение Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |

Изобретение относится к измерению параметров выполненной работы и управления драглайном при ведении открытых горных работ. Цель изобретения - повышение точности управления за счет определения зоны разгрузки ковша. Для этого измеряют координаты положения ковша по длинам подъемного и тягового канатов, а также поворота платформы. Определяют начало операций черпания, подъема и разгрузки по отношению токов подъема и тяги, требуемую высоту подъема груженного ковша в каждой расчетной точке профиля отвала. Дополнительно измеряют угол поворота блока наводки тягового каната. Формируют команду на разгрузку ковша при выполнении условия равенства фактический и требуемой высоты подъема груженого ковша и равенства фактического и расчетного углов перемещения груженого ковша. Угол перемещения груженого ковша определяют с учетом угла поворота блока наводки тягового каната. Требуемую высоту подъема груженого ковша определяют с учетом высоты переподъема ковша по условию его разгрузки. 7 ил.
Т 1.0, IT,(О
где Т - 1,5-2,0 с.
Определяют начало операции подъема груженого ковша sign А I, если в течение Т
2,5 i- 1,0 т
(2)
Определяют начало операции разгрузки ковша sign В 1, если в течение Т
Inl 9 ;
Iri
(3)
Измеряют угол поворота платфор- I угол поворота блока наводки тягового каната о ni и угол поворота платформы с груженым ковшом.
CM
M f vf i|sign A 1 (5) f/ 4 ilsign В 1 (6)
(„+1)
(16) 1цтз sin(4 o+ f)
(17)
f arccg ( - 1,5) (18)
ной цепей (зависят где 1ц-г - расстояние между кромкой
зубьев и центром тяжести
- коэффициенты удлинения тяговой и подъемот емкости и конструкции ковша и его положения в пространстве) , экспериментально установлены 0 пределы изменения Ки и KT:
ковша;
о угол наклона линии от
кромки зубьев до центра тяжести ковша к днищу ков ша (конструктивная постоянная) ;
.ign В. 1
т |,ign В 1 (10
Измеряют угол наклона плоскости поворотной платформы экскаватора )
зоне отвала
и,ч Ц;соз + -
(11)
L. sint - d;cos -
(12) где LT; - проекция свешивающейся
части тягового каната на ось стрелы;
di - кратчайшее расстояние между центром тяжести ковша и осью стрелы;
L.
L iv
2L
di 1l r; bi
где L - длина стрелы; EC
где г. (13) (14)
(15)
с, - угол наклона оси стрелы к
горизонту;
Гцт59 Ьцт5 - горизонтальная и вертикаль- ная составляющие расстояния от кромки зубьев до центра тяжести ковша;
ковша;
о угол наклона линии от
кромки зубьев до центра тяжести ковша к днищу ковша (конструктивная постоянная) ;
Т угол наклона днища ковша к горизонту.
Определяют поправку на угол поворота платформы с груженым ковшом, учитывающую колебание ковша в плоскости, перпендикулярной плоскости стрелы:
rd 1 Г-- sin о(, . (19) Iri,
угол перемещения гру
П,к; fnr + f(sign
сли . (sign
или («ig isign
(20)
п§й : 1)
:
ОЛ
лвп
если
или
ОЛ
пвп
оп лвп
:
:;}
пг«.д. | нг; - ,
/sign Vsign
sign sign
де sign on 1 (sign ОЛ 1) - сигнал отклонения ковша от вертикальной плоскости стрелы вправо (влево) при вращении платформы с груженым ковшом вправо, т.е. при sign ПВП 1 (влево, т.е. при sign ЛВП 1).
Определяют координаты кромки зуьев ковша в системе координат
+ Ьт (22) + г,- (23)
Y..
и..
(21) 15
20
25
35
30
где h, г - ордината и абсцисса точки схода тягового каната с направляющего шкива в системе координат .
Определяют выполнение цикла экскавации как реализацию последовательности операции начала черпания в текущем цикле экскавации (sign С 1), начала подъема груженого ковша (sign А 1), начала разгрузки ковша (sign В 1) и начала черпания в последующем цикле экскавации (sign С 1), sign Ц 1,
если
sign С 1
(24)
signi А 1 , signj.B 1 8ignlC,. 1
Подсчитывают число выполняемых циклов эксказации п;,; задают элементарный объем горной массы Qi,, соответствующий элементарной площади сечения отвала
Qi к,
п,
(25)
М Ч
где К/1 - коэффициент пропорциональности;
Пц 5-25 - принятое число циклов экскавации.
Задают углы начала J MUM и окончания vj сектора разгрузки ковша, определяют необходимый угол переноса груженого ковша s
Ki
(26)
гдеА р - текущее значение приращения угла поворота платформы
f. Ki
(27)
0
5
1 п,
i
п,;
е п, .
где К{ 1, если 04 п, Кг 2, если п Ki 3, если п 4 и так далее.
При треугольной форме сечения отвала
5
5
-Nn-i
0
0
i 2 -t- (N-1)4 , (28)
при прямоугольной форме сечения отвала
.2 - (N, - 1) 1,5J(29)
где N - порядковый номер расчетной точки профиля отвала для вычисления приращения уг- ла nj. - число выполненных циклов
экскавации;
const - шаг приращения угла поворота платформы;
0
5
nj - требуемое к отсыпке число циклов экскавации в расчетной точке профил отвала.
При трапецеидальной форме сечения отвала до момента достижения заданной высоты отвала количество ковшей отсыпаемой горной массы в каждой расчетной точке профиля отвала определяют так же, как и для треугольной формы сечения отвала, а далее эта величина постоянна и равна половине указанного значения.
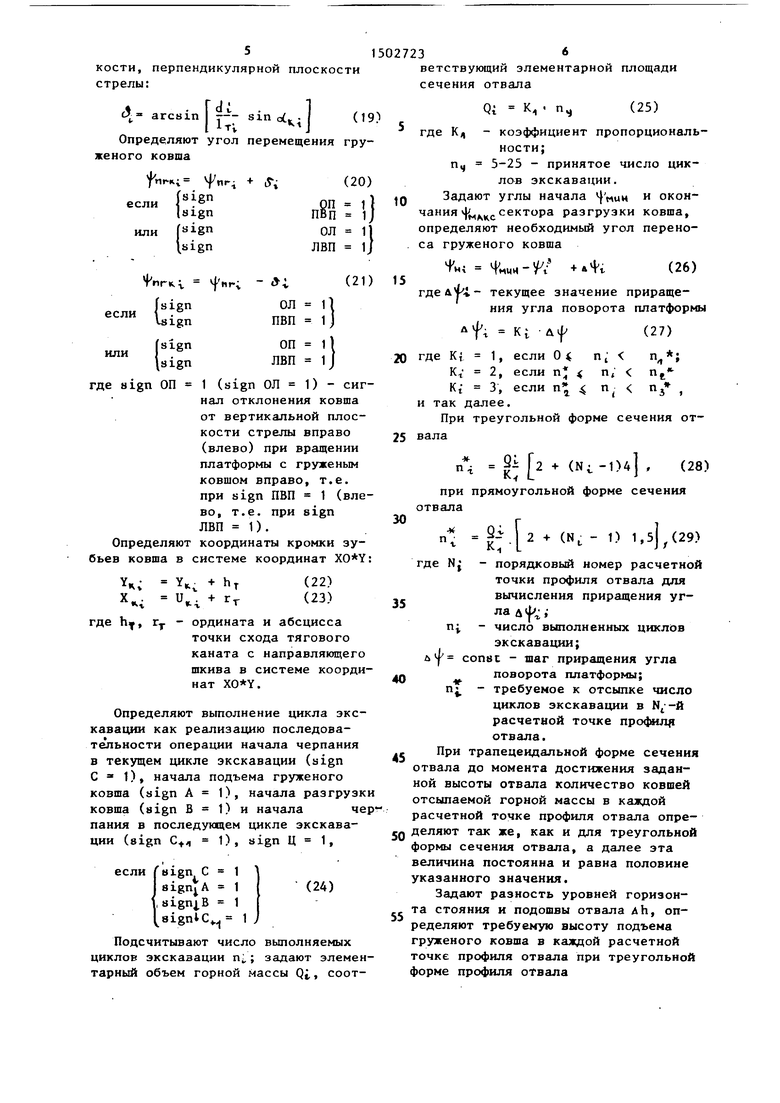
Задают разность уровней горизонта стояния и подошвы отвала Ah, определяют требуемую высоту подъема груженого ковша в каждой расчетной точке профиля отвала при треугольной форме профиля отвала
если где
ПГР
ь
Рс
-h,
hp,
Yc - Nt
-ь Д t
(30) (31)
л h
+ л ± л h (Xe- X,.)ccg(32) Д f eg (33) hrfi Ye - (Xc- )ccgr (34) если hr,; h/ + /i ± лЬ (35) где Y , Xj3 - ордината и абсцисса точки схода подъемного каната с направляющего шкива в системе координат
- угол между вертикалью и линией, определяющей разгрузку ковшаi расчетный угол образую- щей отвдла; величина переподъема ковша по условию безопасности ведения работ
Д 1,5-3,0 М) ордината подошвы отвала в системе координат
высота подъема ковша по условию разгрузки; расчетная высота подъема ковша по условию формирования заданного профиля отвала.
Формируют сигна.п достижения требуемой высоты подъема груженого ковша
10
& 15
дЬ
hi hp
15027238
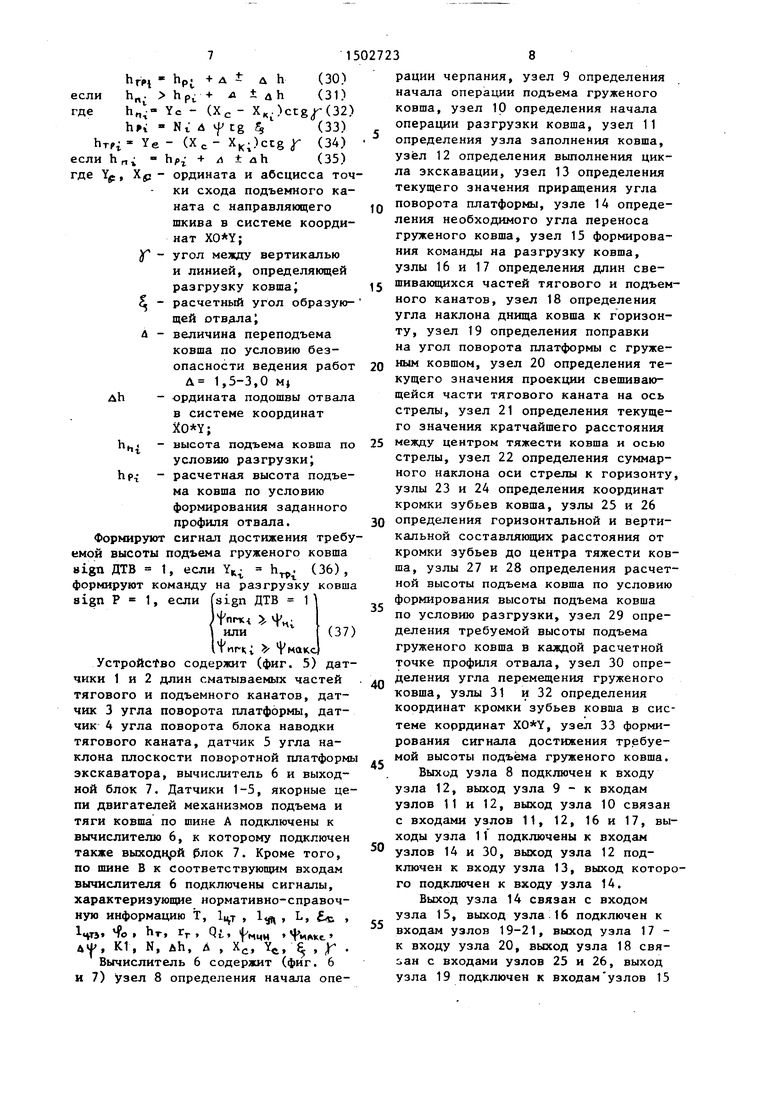
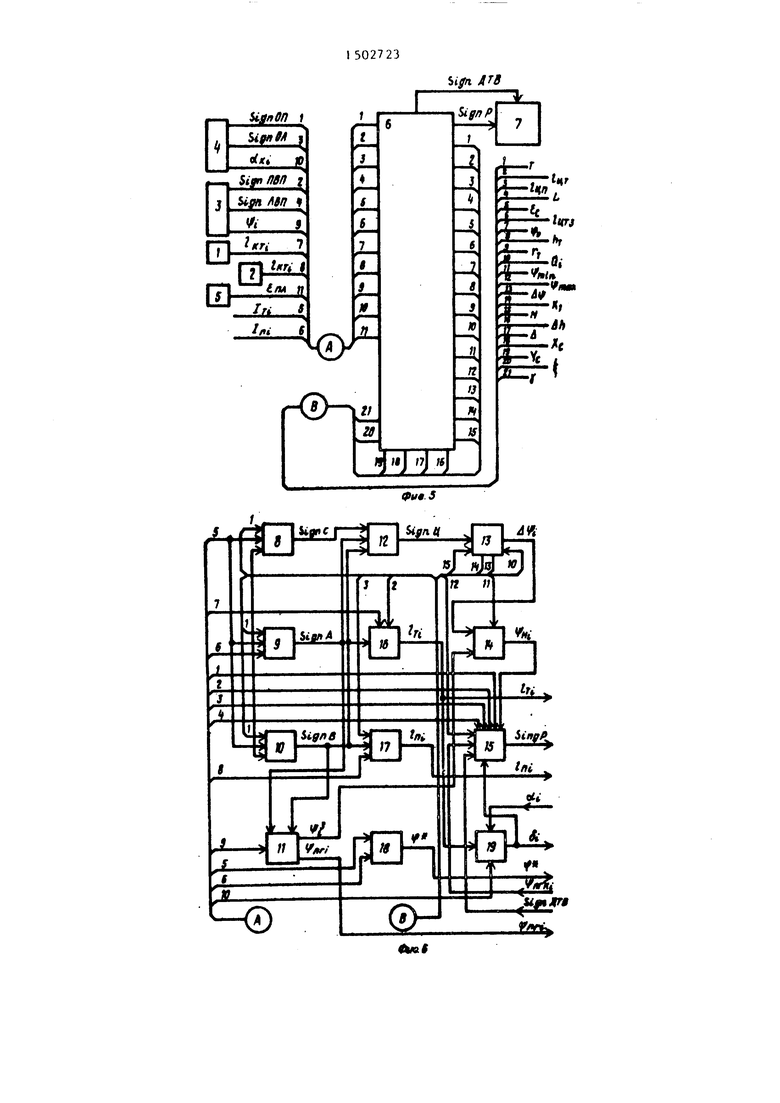
рации черпания, узел 9 определения начала операции подъема груженого ковша, узел 10 определения начала операции разгрузки ковша, узел 11 определения узла заполнения ковша, узел 12 определения выполнения цикла экскавации, узел 13 определения текущего значения приращения угла поворота платформы, узле 14 определения необходимого угла переноса груженого ковша, узел 15 формирования команды на разгрузку ковша, узлы 16 и 17 определения длин свешивающихся частей тягового и подъемного канатов, узел 18 определения угла наклона днища ковша к горизонту, узел 19 определения поправки на угол поворота платформы с груженым ковшом, узел 20 определения текущего значения проекции свешивающейся части тягового каната на ось стрелы, узел 21 определения текущего значения кратчайшего расстояния между центром тяжести ковша и осью стрелы, узел 22 определения суммарного наклона оси стрелы к горизонту, узлы 23 и 24 определения координат кромки зубьев ковша, узлы 25 и 26 определения горизонтальной и вертикальной составляющих расстояния от кромки зубьев до центра тяжести ков20
25
30
Bign ДТВ 1, если Y h (36), формируют команду на разгрузку ковша sign Р 1, если sign ДТВ 1
fnnc. .Ч.. или (37)
Тип;; Н макс Устройство содержит (фиг. 5) датчики 1 и 2 длин сматываемых частей тягового и подъемного канатов, датчик 3 угла поворота платформы, датчик 4 угла поворота блока наводки тягового каната, датчик 5 угла наклона плоскости поворотной платформы экскаватора, вычислитель 6 и выходной блок 7. Датчики 1-5, якорные цепи двигателей механизмов подъема и тяги ковша по шине А подключены к вычислителю 6, к которому подключен также выходнрй рлок 7. Кроме того, по шине В к соответствующим входам вычислителя 6 подключены сигналы, характеризующие нормативно-справоч flV. L, с
ную информацию Т, 1
IHTS о , hr, Гг , Qi, ,fv,ftkt
д, К1, N, Ah, Л , Хс, Ye, , Г
Вычислитель 6 содержит (фиг. 6 и 7) узел 8 определения начала опе5
0
5
0
5
ша, узлы 27 и 28 определения расчетной высоты подъема ковша по условию формирования высоты подъема ковша по условию разгрузки, узел 29 определения требуемой высоты подъема груженого ковша в каждой расчетной точке профиля отвала, узел 30 определения угла перемещения груженого ковша, узлы 31 и 32 определения координат кромки зубьев ковша в системе коррдинат , узел 33 формирования сигнала достижения требуемой высоты подъёма груженого ковша.
Выход узла 8 подключен к входу узла 12, выход узла 9 - к входам узлов 11 и 12, выход узла 10 связан с входами узлов 11, 12, 16 и 17, выходы узла 11 подключены к входам узлов 14 и 30, выход узла 12 подключен к входу узла 13, выход которого подключен к входу узла 14.
Выход узла 14 связан с входом узла 15, выход узла 16 подключен к входам узлов 19-21, выход узла 17 - к входу узла 20, выход узла 18 свя- с входами узлов 25 и 26, выход узла 19 подключен к входам узлов 15
9
20 связан с входаи 30, выход узла ми узлов 21, 23 и 24, выход узла 2 подключен к входам узлов 19, 23 и 24, выход узла 22 - к входам узлов 23 и 24, выход узла 23 через узел 31 связан с входами узлов 28 и 29, выход узла 24 через узел 32 подключен к входу узла 33, выход узла 25 к входу узла 24, выход узла 26 - к входу узла 23, выход узла 27 - к входам узлов 28 и 29, выход узла 28 - к входу узла 29, выход которого связан с другим входом узла 33. Выходы узлов 15 и 33 связаны с входами выходного блока 7.
Устройство работает следующим образом.
В процессе экскавации с выходов датчиков 1-5 и с якорных цепей двигателей механизмов тяги и подъема ковша по шине А в вычислитель 6 поступают входные сигналы. В результате этого в начале операции заполнения ковша на выходе узла 8 формируется сигнал sign С 1 (1), который поступает на вход узла 12. После заполнения ковша в начале его подъема на выходе узла 9 формируется сигнал sign А 1 (2). Одновременно на выходах узла 11 формируются сигналы Ф| (5) и пг- (4), которые характеризуют соответственно угол заполнения ковша и угол поворота платформы с груженым ковшом. На выходах узлов 16 и 17 формируются сигналы, пропорциональные 1г{.(7 и 9) и Irxi (8 и 9) , которые поступают на входы узлов 20 и 21. На выходе узла 20 формируется сигнал L-ri (13), на выходе узла 21 формируется сигнал dt (14), на вьг- ходе узла 22 формируется сигнал (15). При разгрузке ковша на выходе узла 10 формируется сигнал sign В 1 (3). В процессе перемещения ковша на выходах узлов 25 и 26 формируются сигналы, пропорциональные и Гцт5 (16-18), которые поступают на входы узлов 23 и 24. На другие входы узлов 23 и 24 поступают выходные сигньш с узлов 20-22, 1 и 18, в результате чего на выходах узлов 23 и 24 формируются координат Urtj , Yni кромки зубьев ковша в системе UOY (11 и 12). Указанные координаты преобразуются узлами 31 и 32 в координаты Xti, Y (22 и 23).
0
0
5
0
5
0
5
0
5
0
5
При по вороте платформы с груженым ковшом в момент его разгрузки на выходе узла 30 формируется сигнал, пропорциональный f riM i ( 19-21), поскольку с выхода узла 11 поступает сигнал, пропорциональный . () а с выхода узла 19 - сигнал пропорциональный (19). При выполнении каждого цикла экскавации на выходе элемента 12 формируется сигнал sign Ц 1 (24) , при этом на выходе узла 13 формируется сигнал Л4г (27-29), а на выходе узла 14 - значение необходимого угла переноса груженого ковша Yni (26). В процессе формирования профиля отвала после выполнения каждого цикла экскавации на выходе узла 27 формируется сигнал, пропорциональный hp- (33), который поступает на входы узлов 28 и 29. В результате этого на выходе узла 29 формируется сигнал (30, 31, 34 и 35), который, в свою очередь, поступает на вход узла 33. При выполнении условий (36) на выходе узла 33 формируется сигнал sign ДТВ 1, который поступает в выходной блок 7 и сигнализирует машинисту экскаватора о достижении ковшом требуемой высоты его подъема. При достижении точки отвала, в которой обеспечивается выполнение условий (37), на выходе узла 15 формируется сигнал sign Р 1, который также поступает в выходной блок 7 и сигнализирует машинисту о необходимости вьтолнения операции разгрузки ковша.
Таким образом, в процессе экскавации устройство автоматически сигнализирует машинисту экскаватора о достижении требуемой высоты подъема груженого ковша и о необходимости выполнения операции разгрузки ковша, при этом обеспечивается формирование заданного профиля отдала. В результате этого уменьшается утомляемость машиниста экскаватора, снижается i средний угол поворота платформы с груженым ковшом, что в итоге приводит к увеличению эксплуатационной производительности экскаватора.
Формула изобретения
Способ управления разгрузкой ковша экскаватора-драглайна, включающий определение цикла экскавации, операций начала черпания, начала подъема
и начала разгрузки груженого ковша с учетом измеренных токов якорной цепи двигателей механизмов подъема и тяги, измерение угла поворота плаформы, определения длин сматываемых частей тягового и подъемного канато определение длин свешиваклцихся частей тягового и подъемного канатов, подсчет числа выполненных циклов экскавации, задание углов начала и окончания сектора разгрузки ковша и элементарного объема горной массы, соответствующего элементарной пло- .щади сечения отвала, измерение угла поворота платформы с груженым ковшо определение необходимого угла переноса груженого ковша, формирование команды на разгрузку ковша, измерение угла наклона поворотной платформы в плоскости стрелы, задание разности уровней горизонта стояния и подошвы отвала, определение координат груженого ковша в процессе его перемещения, определение требуемой высоты подъема груженого ковша в каждой расчетной точке профиля отвала, формирование сигнала достижения требуемой высоты подъема груженого ко9ша, отличающийся тем, что, с целью повышения точности путем определения зоны разгрузки ковша, измеряют угол поворота блока наводки тягового каната, а команду на разгрузку ковша формируют при условии равенства фактической и требуемой высот подъема груженого ковша,
равенства фактического и необходимого углов перемещения груженого ковша, при этом угол перемещения груженого ковша определяют с учетом текущего значения угла поворота блока наводки тягового каната, а требуемую высоту подъема груженого ковша определяют с учетом высоты переподъема ковша по условиям его разгрузки, при этом начало операции черпания определяют по формуле
о . 1 0,1 sign с 1 ,если -
iTi IT : 1,5-2,0 с
начало операции подъема ковша по формуле
1 «;ч I«i I ЬО sign А- 1,если 2,5 |- ,5-2,0с
а начало операции разгрузки ковша
2,5 т; 1,5-2,0 с
по формуле sign В
, 1Иг 1,если --f
где sign С, sign А, sign В
соответственно сигналы начала операции черпания и начала операции подъема и разгрузки ковша .
«i « r{,
1-м
токи якорных цепей двигателей механизмов подъема и тяги ковша ,
1,5-2,0 с - длительность контроля сформулированных выше условий.
у
и..
J П
у
..
фие.1
к ti /А d Л}е$
.4
S S
St АГВ
iil«L
ЦялЩгв
Фие. 7
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
