Изобретение относится к области средств автоматизации, а именно к пневматическим регуляторам с переменной структурой.
Известен пневматический регулятор, содержащий пропорциональный блок, блок формирования функции переключения, блок логики и ключевой элемент.
Однако этот регулятор позволяет изменять только величину коэффициента усиления без возможности изменения его знака и для формирования функции переключепня использует лишь знаки рассогласования (разницы между заданными и текущим значениями регулируемой величины) и его нервой пронзводной, что снижает качество регулирования параметров на инерционных объектах с запаздыванием.
Цель изобретения - обеспечепие дополнительного изменения в процессе регулирования знака коэффициента усиления, использования при формировании функции переключения сигнала рассогласования, его первой производной и выходного сигнала нелинейного элемента и, следовательно, повышение качества регулирования технологических процессов.
Это достигается тем, что в блоке формирования функции переключения входы первого сумматора соединены с входными каналами и каналом опорного давления, выход этого сумматора - с первым и вторым элементами сравнения и через элемент дифференцирования с вторым сумматором, второй вход которого через переключатель и элемент умножения на постоянный коэффициент подключен к выходу суммирующего блока, второй вход
первого элемента сравнения соединен с каналом опорного давления, второй вход второго элемента сравнения - с выходом второго сумматора, а управляющий вход переключателя - с выходом блока логики.
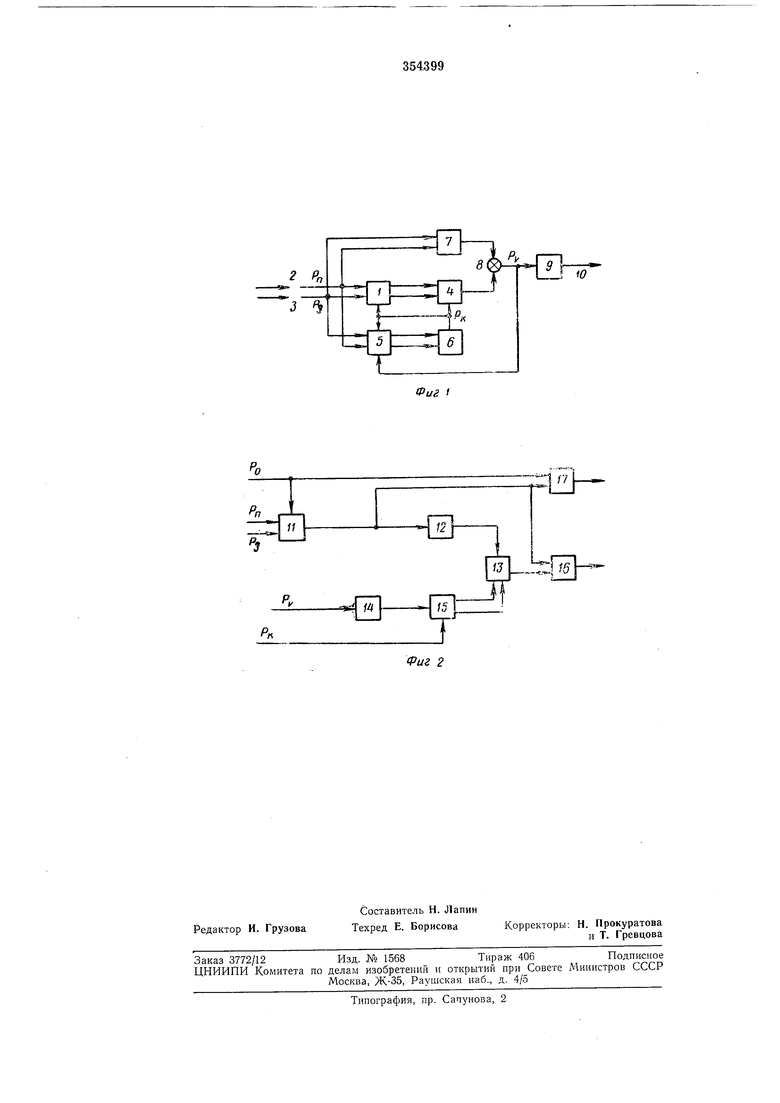
На фиг. 1 приведена схема регулятора; на фиг. 2 - схема блока формирования функции нереключеиня.
Регулятор содержит блок / переключения, входы которого соединены с входными каналами «Параметр 2 и «Задание 3, а выходы- с входами пронорционального блока 4. Блоки 1 ti 4 связаны с выходом блока 5 формирования функции переключения через блок 6 логики.
Регулятор включает также ннтегральный блок 7, на входы которого поступают те же входные сигналы из каналов 2 и 3. Выходы
нронорционального 4 н интегрального 7 блоков соединены с входами блока 8 суммирования, выход которого связан с одним из входов блока 5 формирования функции переключения и через блок 9 ограничений с выходным канаВсе функциональные блоки построены на пневматических вычислительных и переключательных элементах.
Блок формирования функции переключения содержит сумматор 11, на входы которого поданы сигналы РП и РЗ и опорное давление РОВыход сумматора // через блок 12 дифференцирования связан с одним из входов сумматора 13, а два других входа сумматора 13 через последозательно соединенные элемент М умножения на постоянный коэффициент и переключатель 15 - с выходом блока 8 суммирования. Управляющий вход переключателя 15 соединен с выходом блока 6 логики, входы элемента 16 сравнения - с выходами сумматоров 11 и 13, а входы элемента 17 сравнения - с- выходом сумматора 11 н каналом опорного давления РО- Выходы элементов 16 и 17 сравнения связаны со входами блока 6 логики.
Регулятор работает следующим образом.
На входы регулятора подаются сигналы, пропорциональные заданному РЗ и текущему РП значениям регулируемой величины. Пропорциональный 4 и интегральный 7 блоки отрабатывают регулирующее воздействие вида
Я, 3 - «FS +
TnS
где
при re О,
1+/С2 при
РТ, - управляющее воздействие;
-ф - коэффициент усиления регулятора
(± /Сь ± 2);
S - сигнал рассогласования (Рп - ); Гц - постоянная времени интегрирования;
г - функция переключения. Коэффициент усиления ij) имеет то или иное значение в зависимости от состояния системы регулирования.
Те же сигналы поступают в блок 5 формирования функции переключения, работа которого определяется выражением
г е + S -f СРу sgn РК,
где
.gnp..Lo;
с - весовой коэффициент, вводимый в элементе 14 и обеспечивающий требуемое соотнощение между е и РТ,. Введение в функцию переключения сигнала CPv sgn РК равносильно использованию второй производной е.
Е блоке 5 формирования функции переклю чения на сумматоре 11 определяется сигнал РХ РО- 8, который дифференцируется в блоке 12 и суммируется далее на сумматоре 13 с величиной СР„ sgnPK, полученной на выходе последовательно соединенных элемента 14 и переключателя 15. Далее к а элементах 16, 17 определяются знаки величин е и г, которые являются входами блока в логики. Блок 6 выполняет операцию «неравнозначность, которую можно представить в виде
РК Sgnr Sgfts. Х/ Sgnr Sgn S,
тем самым вырабатывая сигнал РК для переключения структуры регулятора. В результате происходит изменение знака и величины коэффициента усиления регулятора в зависимости от выбранного алгоритма управления.
Предмет изобретения
Регулятор с переменной структурой, содержащий выполненные на пневматических вычислительных и переключательных элементах интегральный блок, пропорциональный блок, соединенный с блоком переключения, и блок формирования функции переключения, входы которых соединены с входными каналами регулятора «параметр и «задание, суммирующий блок, входы которого подключены к интегральному и пропорциональному блокам, а выход
через блок ограничения - к выходному каналу устройства, и блок логики, входы которого соединены с выходами блока формирования функции переключения, а выход - с блоками переключения и пропорциональным, отличающийся тем, что, с целью повышения качества регулирования технологических процессов, в блоке формирования функции переключения входы первого сумматора соединены с входными каналами и каналом опорного давления,
выход этого сумматора подключен к первому и второму элементам сравнения и через элемент дифференцирования к второму сумматору, второй вход которого через переключатель и элемент умножения на постоянный коэффициент соединен с выходом суммирующего блока, второй вход первого элемента сравнения соединен с каналом опорного давления, второй вход, второго элемента сравнения - с выходом второго сумматора, а управляющий вход переключателя - с выходом блока логики,
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| Пневматический регулятор переменной структуры | 1974 |
|
SU533910A1 |
| Пневматический пропорциональный регулятор | 1978 |
|
SU746412A1 |
| Регулятор | 1983 |
|
SU1166060A1 |
| Способ автоматического регулирования перетока мощности | 1990 |
|
SU1809493A1 |
| Пневматический регулятор с переменной структурой | 1974 |
|
SU540256A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Регулятор с переменной структурой | 1979 |
|
SU954929A2 |
| Регулятор с переменной структурой | 1978 |
|
SU783753A1 |
3
-120-
Ч/2
