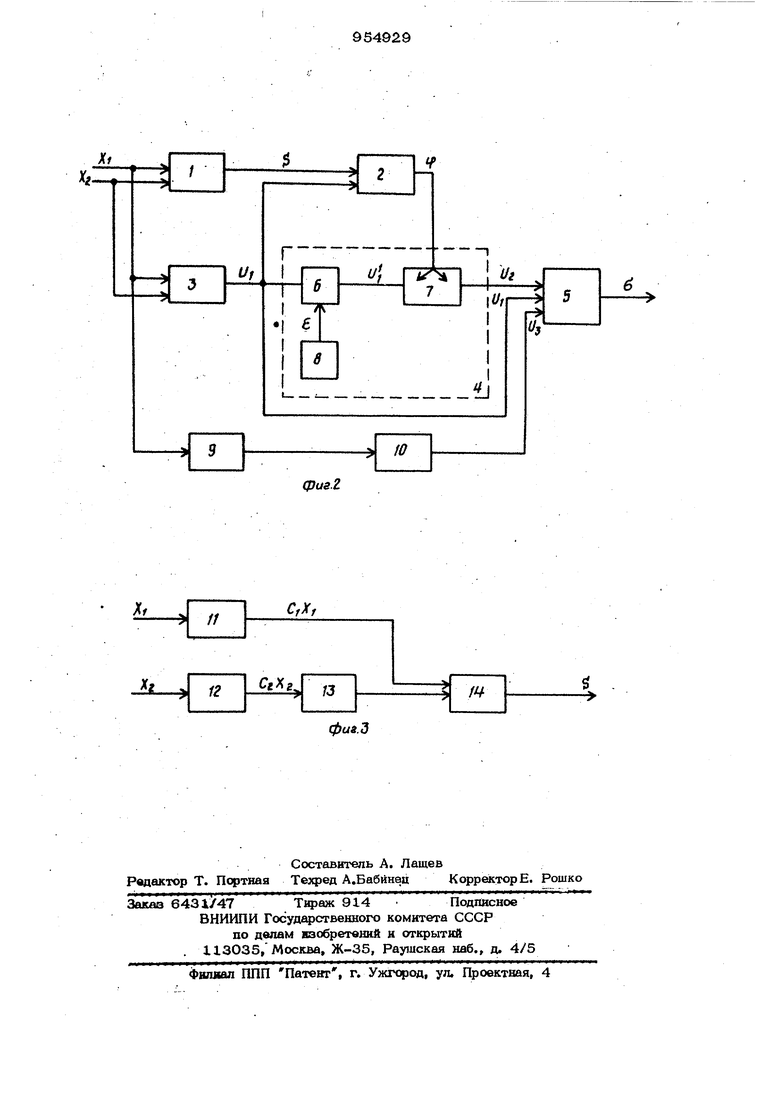
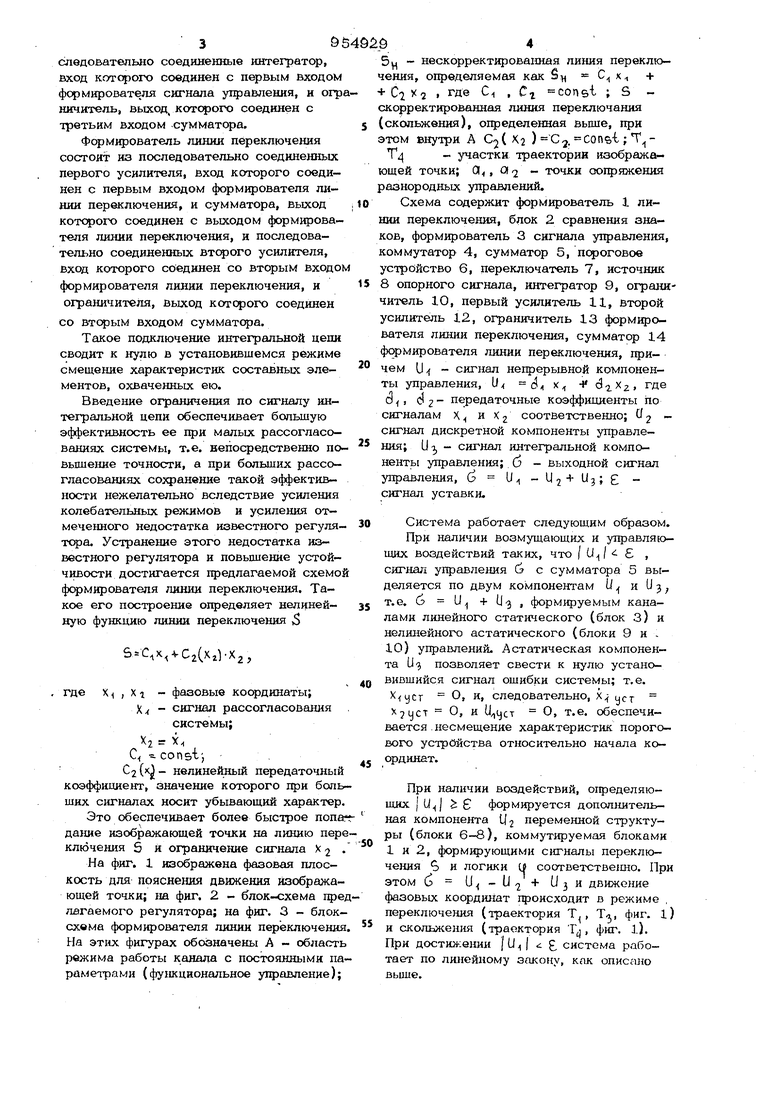
Изобретение относится к приборостроению и может быть использовано при раз работке систем автоматического ухфавлешш нестационарными объектами 1фи наличии больших внешних возмущений. Наиболее близким к предлагаемому является регулятор с переменной структурой, содержащий последовательно соединенные фсрмирователь линия переключения, блок сравнения знаков, переключатель и сумматср, второй вход котсрого соединен со вторым входом блока сравнения знаков и с выходом формирователя сигнала у15)авления, входы котсрого подключены к соответствующим входам .-формирователя линии переключателя, и последовательно соединенные источник опор ного сигнала и пороговое устройство, второй Вход которого соединен с выходом формирователя сигнала у1Ц)авления, а выход которого соединен со вторым входом переключателя. Б этом регуляторе имеют ся два канала управления с переменной структурой и функциональный с постоя ными параметрами) и обеспечивается выбс режима управления в зависимости от режима движения и сигналов ухфавлення и переключения l. Известный регулят имеет невысокую точность, недостаточное быстродействие и ограниченную устойчивость. Ущэавление, осуществляемое таким регулятором, является статическим, вследствие чего неравенство нулю статической сшибки в уставовивщемся режиме уст О обуславливает смещение характеристик регулятора относительно раэнополярных вариаций задающих воэдвйсх ВИЙ, что ухудшает процесс регул1фовг1ния, Кроме того, в регуляторе отсутствует возможность ограничения производных ;в движении фазовых кос динат при наличии . больших возмущений; Цель изобретения - повьоиение точности, устойчивости к быстродействия регулятора. Поставленная цель достигается тем, что в известный регулятор вводятся по395следовательно соединенные интегратор, вход кгугорого соединен с первым входом формирователя сигнала управления, и огр кнчитель, выход которого соединен с третьим входом сумматора. Формирователь линии переключения состоит из последовательно соедшюнных первого усилителя, вход которого соединен с первым входом формирователя линии переключения, и сумматора, выход которого соединен с выходом формирователя линии переключения, и последовательно соедиденных втсрого усилителя, вход которого соединен со вторым входом формирователя линии переключения, и ограничителя, выход которого соединен со втсрым входом сумматора. Такое подключение интегральной цепи сводит к нулю в установившемся режиме смещение характеристик составных элементов, охваченных ею. Введение ограничения по сигналу интегральной цепи обеспечивает большую эффективность ее при малых рассогласованиях системы, т.е. непосредственно новьЕнение точности, а при больших рассогласованиях сохранение такой эффективности нежелательно вследствие усиления колебательных режимов и усиления отмече1шого недостатка известного регулятора. Устранение этого недостатка известного регулятора и повышение устойчивости достигается предлагаемой схемо формирователя линии переключения. Такое его построение определяет нелинейную функцию линии переключения 5 SiC X -4-C2(Xi)-X X , X 7 - фазовые координаты; X - сигнал рассогласования системы; Хг х Q const, Cj (х - нелинейный передаточный коэффицие.нт, значение которого при боль ших сигналах носит убывающий характер Это обеспечивает более быстрое пoпa дание изображающей точки на линию пер ключения 5 и ограничение сигнала Xj На фиг. 1 изображена фазовая плоскость для пояснения движения изображающей точки; на фиг. 2 - блок-схема гфе лагаемого регулятора; на фиг. 3 - блоксхема формирователя линии переключения На этих фигурах обозначены А - область режима работы канала с постоянными па рамет;рами (функциональное управление); S4 5ц - нескорректирова1шая линия переклюения, определяемая как , , где С , Сг const ; S корректированная линия переключашш (скольжения), определенная вьвие, при том внутри А 2 ) С2. consi ; Т Тц- участки траектории изображающей точки; 01, а 7 точки оогфяжения азнородных управлений. Схема содержит формирователь 1 линии переключения, блок 2 сравнения знаков, формирователь 3 сигнала управления, коммутатор 4, сумматор 5, пороговое устройство 6, переключатель 7, источник 8 опорного сигнала, интегратор 9, ограничитель 10, первый усилитель 11, второй усилитель 12, ограничитель 13 формирователя линии переключения, сумматор 14 ф(5 мирователя линии переключения, причем и - сигнал непрерывной компоненты управления, U 6 , где сЗ , d 2 - передаточные коэффициенты по сигналам к и К 2 соответственно; С/2 сигнал дискретной компоненты управления; Ui, - сигнал интегральной компоненты управления; (j - выходной сигнал управления, (р U, -U2+Uj; сигнал уставки. Система работает следующим образом. При наличии возмущающих и управляющих воздействий таких, что / -i , сигнал управления 6 с сумматора 5 выделяется по двум компонентам U и U j т.е. 6 и + 11з , формируемым каналами линейного статического (блок З) и нелинейного астатического (блоки 9 и 10) управлений. Астатическая компонента U-} позволяет свести к нулю установившийся сигнал ошибки системы; т.е. О, и, следовательно, х уст ист О, и О, т.е. обеспечивается .несмещение характеристик порогового устройства относительно начала координат. При наличии воздействий, определяющих I U J формируется дополнительная компонента Ц 2 переменной структуры (блоки 6-8), коммутируемая блоками 1 и 2, формирующими сигналы переключения S и логики (S соответстве1шо. При с; u - u,j4 и ./- |(Irt. If 3 и движение фазовых коордшгат происходит в режиме , переключения (траектория Т, Т,, фиг. l) и скольжения (траектория Tj, фиг. l). При достия-:внии |U J система работает по линейному закону, как описано вьиле. ют сигналы х и Хг соответственно. Зона ограничения 13 в цепи сигнала Xg не менее величины, соответствующей границе разделения режимов утфавления (точки а .и 012-фиг. l). Введение store ограничения, уменьшая угол наклона 5 к х , ограничивает уровень сигнала Х . Одновременно такая функциональная деформашш линии переключения увеличивает устойчивость и быстродействие попадания на нее изображающей точки (фиг. 2). Предлагаемый регулятор с нелинейным астатическим каналом и нелинейным формированием линии переключения обеспечивает деформацию линии переключения 5 , увеличивает устойчивость работы, повышает точность управления до 20 и быстродействие до 15%. Формулаизобретения 1. Регулятс с переменной структу.-рой по авт. св. № 849141, отличаю щ и и с я тем, что, с целью повыше$н т;
линии переключения, и последовательно I соединенных второго усилителя, вход ко- ;тсрого соединен с втqpым входом ф мйрователя линии переключения, и охраничителя, выход которого соединен с вторым входом сумматчза.
последовательно соединенные интегратор, вход соединен с первым входом формирователя сигнала управления, и ограничитель, выход которого соединен с третьим входом сумматора. 2. Регулятор по ц. 1, отличающий с я тем, что, с целью повышения устойчивости и быстродействия регулятора, формирователь линии переключения состоит из последовательно соединенных первого усилителя, вход которого соединен с первым входом формирователя пинки переключения, и сумматора, выход кото- . рого соединен с выходом формирователя Источники информации, принятые во внимание при экспертизе Авторское свидетельство № 849141, кл. G 05 В 13/02, 1979 : (гфототип).
фиа.д
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с переменной структурой | 1981 |
|
SU993208A1 |
| Регулятор с переменной структурой | 1979 |
|
SU849141A1 |
| Регулятор с переменной структурой | 1978 |
|
SU792217A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| Электропривод | 1981 |
|
SU964938A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |