Изобретение относится к системам автоматического управления.
Известные системы автоматического управления содержат последовательно соединенные первый сумматор, второй сумматор, поляризованное реле и исполнительное устройство, соединенное с обьектом управления, выход которого соединен с одним из входов первого сумматора и через последовательно соединенные дифференциатор и блок умножения - с одним из входов второго сумматора.
Предложенное устройство отличается тем, что в нем выход поляризованного реле соединен с одним из входов блока умножения через последовательно соединенные дополнительные ограничитель и интегратор.
Целью изобретения является обеспечение оптимального переходного процесса при ступенчатом входном сигнале при изменении параметров регулятора и объекта управления.
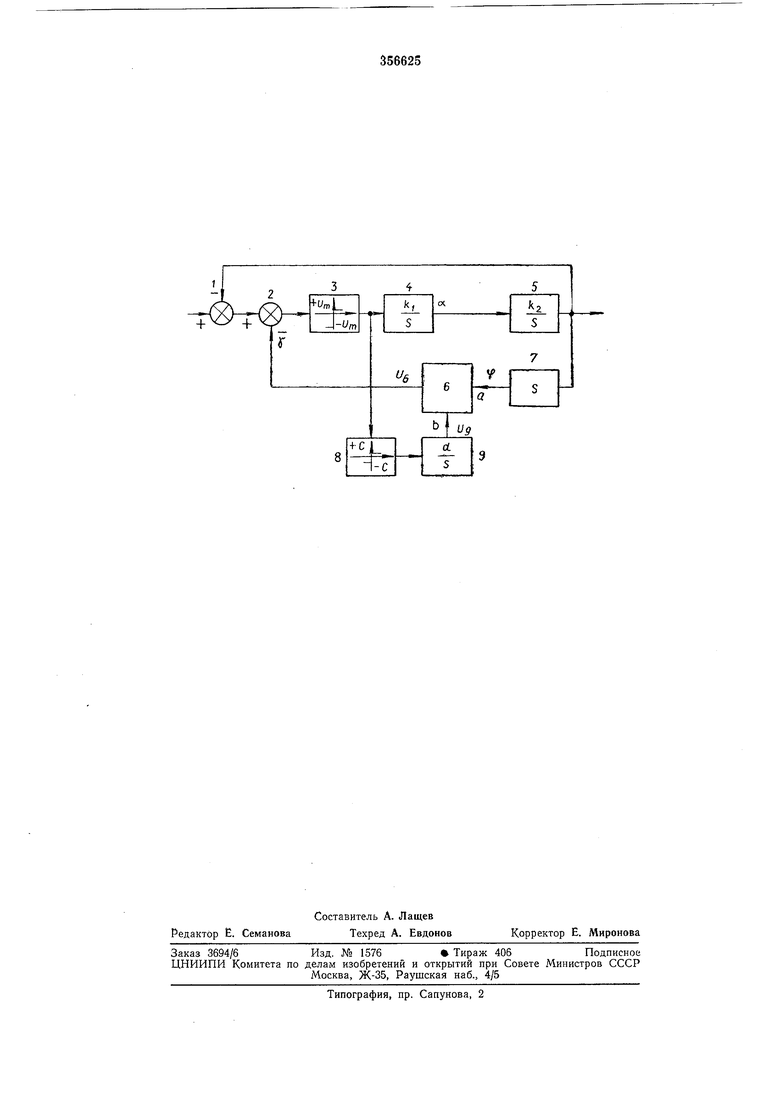
Па чертеже изображена блок-схема предложенного устройства.
Устройство содержит первый сумматор (гироскоп) /, второй сумматор 2, учитывающий сигнал нелинейной коррекции в соответствии с линией переключения, поляризованное реле 5, исполнительное устройство 4 (привод рулядвигателя с редуктором), объект управления 5 с переменным коэффициентом усиления, блок умножения 6, дифференциатор 7 (датчик
скорости стабилизируемого параметра - скоростной гироскоп), ограничитель 8 и интегратор 9.
Папряжение Ua, поступающее на вход блока умножения 6 устройства, пропорциональне скорости изменения выходной координаты ф,
Ua аф, где а - коэффициент усиления.
Па второй вход блока умножения 6 подается сигнал Ub, пропорциональный величине управляющего воздействия (углу отклонения руля)
Ub b-d,
где b - коэффициент усиления.
Перемножающее устройство осуществляет перемножение одной входной переменной на модуль второй
Uc. а-Ь (.
Угол отклонения руля исполнительного устройства 4 связан со скоростью изменения выходной координаты соотнощением
1
.
К,
и, следовательно.
Если выбрать
а-Ь
2/Cif/
где Ит - сигнал с выхода поляризованного реле 3, то сигнал Y соответствует оптимальной по быстродействию линии переключения при любом значении коэффициента /Са объекта управления
1 |1
о к г г 1 т 1tlTl
2/Cif/« ,
2/СхА:2У„
где /Ci и /Са - коэффициенты усиления соответственно исполнительного устройства 4 и объекта управления 5.
В процессе эксплуатации системы могут меняться не только коэффициент K.z, но и параметры /Ci и И-т- Отклонение текущих значений К и и т ОТ расчетного значения а-Ъ
.будут вызывать отклонение пере2-K.rUт
ходных процессов в системе от оптимальных по быстродействию. Для устранения влияния этих параметров на качество переходных процессов предлагается управляющее устройство, в которое введены ограничитель 8 величины управляющего сигнала на уровне
f/вых - ±.С const
И интегратор 9 со строго постоянным коэффициентом усиления
1(.)--,
где d const,
5 - оператор Лапласа.
Если при нулевых начальных условиях интегратора 9 исполнительного устройства 4 и объекта управления 5 приложить ступенчатое рассогласование, то скорость движения объекта управления 5 изменится по закону
.KjJJi. K,,
где t - переменная интегрирования (время), а выходное напряжение интегратора 9 - по закону
t и lc-d-d c-d-t.
Переменные ф и t/d связаны соотношением
и
.-K,-U.
c-d
или соотношением
cd
и,
Сигнал на выходе блока умножения 6, осуществляющего умножение одной входной величины на модуль второй, удовлетворяет соотношению
. /„ у|у|
К1-К,-и„
Если выбрать
c.d .
где d - коэффициент усиления интегратора 9, то сигнал нелинейной коррекции моментов переключения реле
Т ,.
KiK.
будет соответствовать оптимальной по быстродействию линии переключения при любых значениях коэффициентов Ki и /(2 и любой величине управляющего сигнала.
В реальных управляющих устройствах вместо интегратора 9 целесообразно использовать апериодическую / С-цепочку с достаточно большой постоянной времени, а умножение полученного напряжения на модуль угловой скорости осуществлять на потенциометре скоростного гироскопа.
Предмет изобретения
Устройство для автоматического управления, содержащее последовательно соединенные первый сумматор, второй сумматор, поляризованное реле и исполнительное устройство,
соединенное с объектом управления, выход которого соединен с одним из входов первого сумматора и через последовательно соединенные дифференциатор и блок умножения - с одним из входов второго сумматора, отличающееся тем, что, с целью обеспечения оптимального переходного процесса при ступенчатом входном сигнале при изменении параметров регулятора и объекта управления, в нем выход поляризованного реле соединен
с одним из входов блока умножения через последовательно соединенные дополнительные ограничитель и интегратор.
8 -i
cL
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С СУММАТОРАМИ ОТКЛОНЕНИЙ | 2022 |
|
RU2788818C1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Система автоматического управления периодическим процессом ферментации | 1982 |
|
SU1007092A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1990 |
|
RU2047887C1 |
| Устройство для аварийного управления активной мощностью электростанций | 1981 |
|
SU983891A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |