4 Ю
сл
Q1
СО 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ДЛЯ РЕСУРСНЫХ ИСПЫТАНИЙ КОНСТРУКЦИЙ | 1988 |
|
SU1646410A1 |
| Следящая система | 1980 |
|
SU941925A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Устройство для регулирования режимов работы скиповых подъемных установок | 1987 |
|
SU1430334A1 |
| Устройство для моделирования колебательных систем | 1978 |
|
SU698014A1 |
Изобретение относится к двух- канальным нелинейным корректирующим устройствамJ может быть использовано в быстродействующих системах позиционирования, например, станков с программным управлением и приводов роботов-манипуляторов , а также в высококачественных следящих системах и является усовершенствованием известного устройства по авт.св. № 1126925. Целью изобретения является уменьшение энергоемкости устройства, повьшение его точности и уменьшение перерегулирования в устройстве. Цель достигается за счет того, что сигнал заранее дифференцируется в управляемом интеграторе, режим работы которого зависит от знака суммы сигнала рассогласования и его экстремального значения и от выходного сигнала нуль-органа. Продифференцированный сигнал усиливается, делится на экстремальное значение сигнала рассогласования и периодически подается с выхода нелинейного корректирующего устройства на вход двигателя с нагрузкой. 3 ил. «
вЧ)
Изобретение относптся к двухка- нальным нелинейным кор,ректирующи1м устройствам, может быть использовано в быстродейству 01цих системах по- зшдионирования,например станков с программньм управлением н приводов роботов-манипуляторов 5 а также в высококачественных следящих системах и является усовершенствованием известного устройства по йвТо ев № 1126925,
Цель изобретения у геньшение энергоемкости, повьтение точности устройства
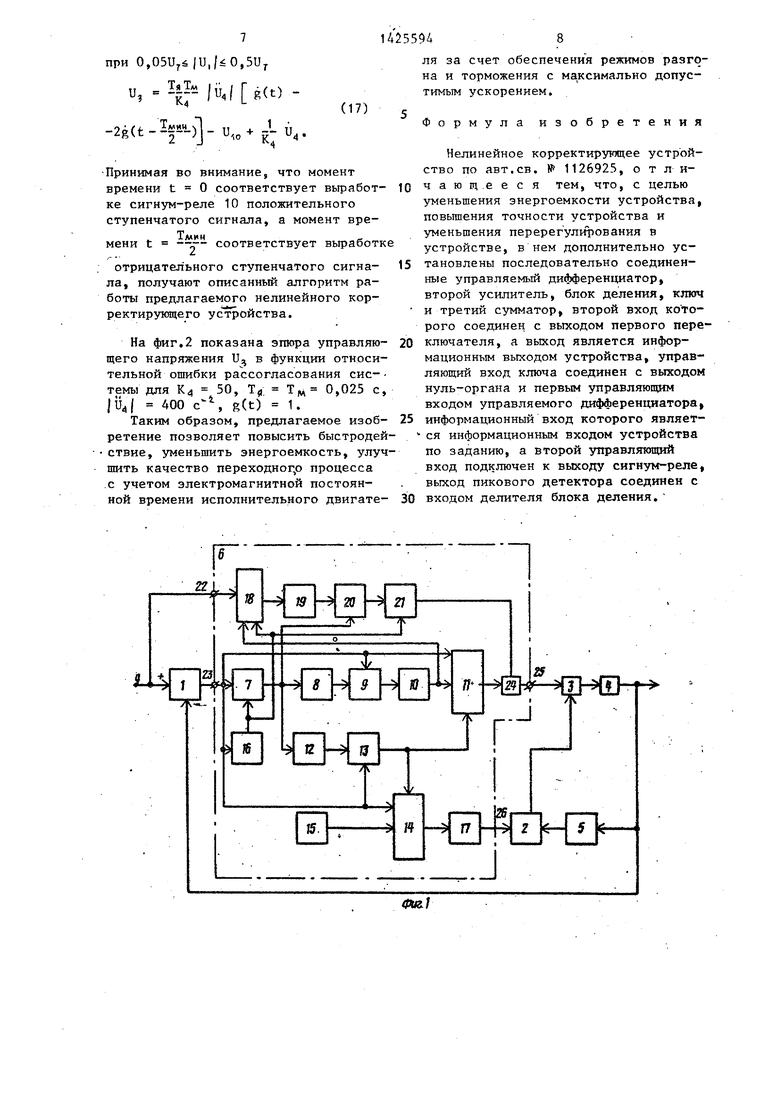
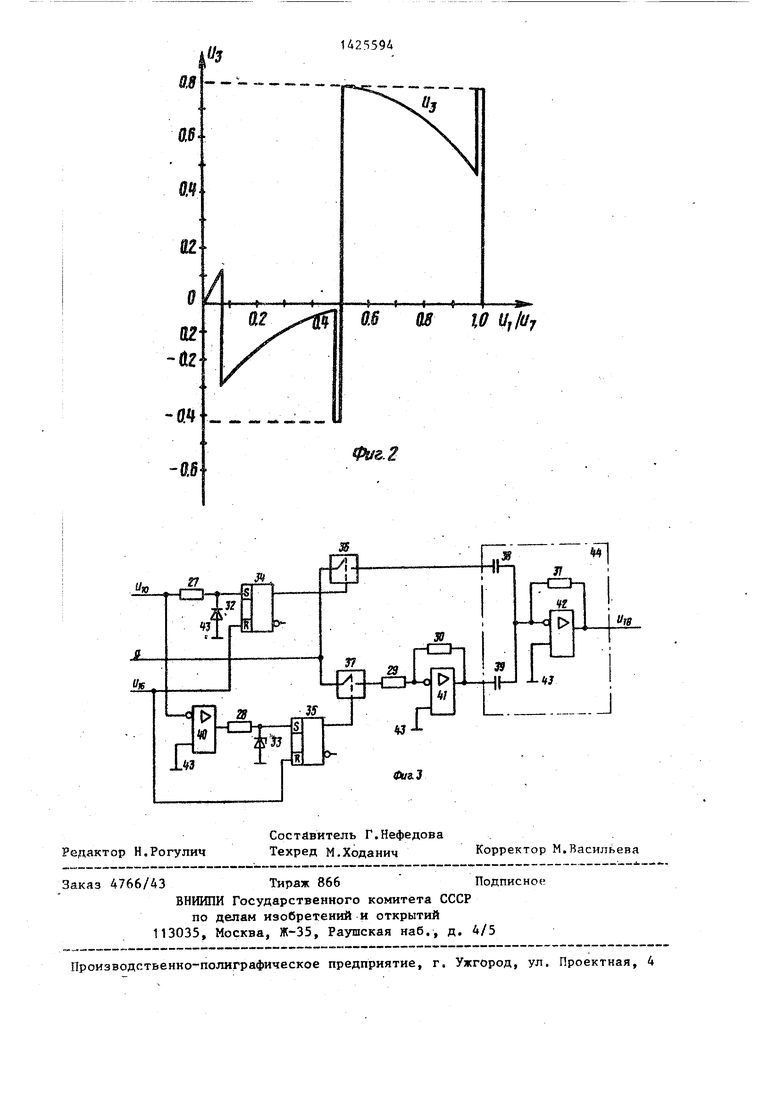
На фиг«1 представлена функциональная схема нелинейного корректи - рующего устройства в составе систе f-ib управления-5 на фиг,2 - эгаоры натг- ряженияу иллюстрирующие работу устройства j на - принципиальная схема управляемого дифференциатора.
Устройство содержит измеритель 1 рассогласованияJ блок 2 умножения суммирующее устройство 3,, исполнительный двигатель 4 с нагрузкой датчик 5 скорости5 нелинейное корректирующее -устройство 65 пиковый детектор 7j первьш масштабирующий блок 8,, первой cyM f jaTop 9., сигкум-реле 10,, первый переключатель 11}. второй масштабируклций блок 12,. второй, сумматор 13 второй перекгаочатель I4j, источник 15 постоянного напряжения 5 нуль-орган 15, первый усилитель Г/, управляе.мый дифференциатор 18, второй усилитель 19, блок 20 деления., ключ 21J информационный вход. 22 не линейного корректирующего устройства 6 по заданию информационный вход 23 нелинейного корректиру10Е,его устройст ва 6 по отклонению третий сумматор 24J информационньй выход 25 нелиней ного корректирующего устройства 6j выход 26 управления нелинейного кор- ректирурп,его устройства б, резисторы 27-31, ста-билитроны 32 и 33, RS-триг геры 34 и 35,, ключи 36 и 37, конденсаторы 38 и 39, операционные усилители 40-42э общая шина 43, дифференци :.1тор 44 Ui - выходкой сигнал i-ro функционального блока g-сигнаг; задания.
Устройство работает в составе системы управления следующим образом
Управляемый дифференциатор 18 служит для выработки сигнала производной от сигнала задания g в зависимости от текущей ошибки, системы, Cor.rte.Co
S
5
0
3
0
S
но приведенному описанию алгоритма работы всего нелинейного корректирующего устройства 6 сигнал U, с выхода нуль-органа по R-входам сбрасывает в нуль RS-триггеры 34 и 35, выходные сигналы которых размыкают ключи 36 и 37. При срабатывании сиг- нум-реле 10, сигнал с его выхода поступает на ограничитель уровня, собранный на резисторе 27 и стабилитроне 32, а также на инвертирующий операционный усилитель 40 о Если уровень сигнала положительньй, срабатывает только RS-триггер 34, потому что на выходе инвертирующего операционного усилителя 40 устанавливается отрицатель«ый потенциал, которьй че- рез резистор 28 и стабилитрон 33 за- шунтируется на общую шину 43 и RS- триггер 35 не сработает.
Выходной сигнал RS-триггера 34 мыкает ключ 36 и сигнал задания g поступает на первый вход дифференци- атора 44, собранного на операционном усилителе 42, резисторе 31 и конденсаторах 38 и 39 с, Когда сигнум-реле 10 пвребрасъшается, сигнал Vfo становится отрицательным и, инвертируясь усилителем 4.0, через резистор 28 и стабилитрон 33 устанавливает RS- триггер 35 в единичное состояние. .: Ключ 37 замыкается. Сигнал задания g, инвертируясь операционным усилителем 41, поступает на второй вход дифференциатора 44 Резисторы 29 и 30 обеспечивают коэффициент усиления инвертирующего операционного усилителя 41, равный двум. Конденсаторы 38 и 39 и резистор 31 дают единичный коэффициент дифференциатора 44 по каждому их входов.
По окончании переходного процесса нуль-орган 16 сигналом , сбрасьша- ет в ноль RS-триггеры 34 и 35, и ключи 36 и 37 размыкаются. Таким образом, описанная схема позволяет дифференцировать входной сигнал задания g в зависимости от знака выходного напряжения сигнум-реле .
При перебросе сигнум-реле 10 на отрицательное напряжение на выходе дифференциатора 44 вырабатывается суммарный сигнал производных сигналов, поступающих на каждый из его входов. Производная от сигнала задания g,. который поступил на второй вход дифференциатора 44, является инвертированной и удвоенной по отношению к про3
изводной от сигнала задания р,, который поступил на первый вход дисЬфе- ренциатора 44, Второй усилитель 19 обеспечивает усиление выходного сигнала управляемого дифференциатора 1Я
ТяТм
к
пг т с коэффициентом Кд |tl4i, где
Т J-я
К.
и.
« - соответственно
MS М 4
электромагнитная и электромеханическая постоянная времени, коэффициент усиления и максимально возможное ускорение двигателя 4 с нагрузкой. Усилитель 19 может быть собран на операционном усилителе,
Блок 20 деления осуществляет деление выходного напряжения усилителя 19 на выходное напряжение Uy пикового детектора 7,
Ключ 21 представляет собой аналоговый ключ, управляемый нуль-органом 16, и служит для предотвращения поступления помехи на суммирую0;ее устройство 3 при отключении управляемого дифференциатора 18,
Система работает в трех режимах,
В режиме разгона при ,/5 0,511-, в режиме торможения при iOjSUj ; в режиме апериодического движения в точке позиционирования при Оё/и, / иг Ilf/К, где и, - сигнал рассогласования на выходе измерителя 1 рассогласования; U - экстремальное значение сигнала рассогласо
1425594
ляет сформировать на его выходе дополнительно к сигналу производной задания р, первого режима удвоенное значение производной задания g с отрицательным знаком, т,е, в момент переключения сигнум-реле 10 выходно сигнал U,g равен U,g -р, так как (U,g g + (-2р,) -р).
10
Сигнал U,R опять усиливается уси
лителем 19 с коэффициентом 2, и делится в блоке 20 деления на величин сигнала 11 и поступает- на суммирующ устройство 3, где суммируется с вы15 ходными сигналами первого переключателя 11 и блока 2 умножения.
Поскольку момент срабатывания си нум-реле 10 определяется текущей - ошибкой системы, нелинейное коррект
20 рующее устройство формирует три сиг нала управления Uj t 25 функции текущей ошибки U, системы.
Тем самым обеспечивается оптимал ный переходный процесс с учетом
25 электромагнитной постоянной времени двигателя 4 с нагрузкой. При ошибке системы, равной нулю, нуль-орган 16 сбрасывает в ноль пиковый детектор и управляемый дифференциатор 18, а
30 также кратковременно размыкает ключ 21 для предотвращения прохождения п мехи в момент отключения уцравляемо го дифференциатора IP.
Предлагаемьй алгоритм работы поз
нания, зафиксированное пиковым детек- 35 получить оптимальный разгон
..тором 7; К 20 ,
Сигнум-реле 10 выдает в первом режиме на первый управляюпшй вход управляемого дифференциатора 68 по- ложительньш ступенчатьш сигнал, на 40 выходе которого формируется сигнал . производной задания р и усиливается усилителем 19 с коэффициентом усиления Кд, а в блоке 20 деления делится на величину экстремального значе- 45 ния сигнала UY, запомненного в пиковом детекторе 7, Для входного сигнала типа скачок величина UT очевидно равна g. Через замкнутый ключ 21 (так как сигнал с нуль-органа 16 от- 50 сутствует) выходной сигнал IJ/jo поступает на суммирующее устройство 3, где суммируется с выходными сигналами первого переключателя 11 и блока
и торможение с учетом электромагнит ной постоянной Т двигателя 4 с наг рузкой.
Двигатель 4 с нагрузкой имеет пе редаточную функцию вида
и rT,lIllE)
Р и;(рТ- (т,т-);ТТ1
где ) - передаточная функция дв гателя 4 с нагрузкой на валу.
Дифференциальное уравнение, описывающее поведение системы с учетом (1), примет вид
,1Т,
А . К.4
iJ4+
Переходный процесс, вызванный
2 умножения. Во втором режиме сигнум- 55 ступенчатым воздействием g, называ- реле 10 формирует отррщательньтй ступенчатый сигнал и,р , которьй, поступая на первый управляющий вход управляемого дифференциатора 18, позвоется оптимальным, если он является монотонным и время переходного процесса имеет минимально возможное значение Тд,„ц , совместимое с огргни
5594
ляет сформировать на его выходе дополнительно к сигналу производной задания р, первого режима удвоенное значение производной задания g с отрицательным знаком, т,е, в момент переключения сигнум-реле 10 выходной сигнал U,g равен U,g -р, так как (U,g g + (-2р,) -р).
10
Сигнал U,R опять усиливается усилителем 19 с коэффициентом 2, и делится в блоке 20 деления на величину сигнала 11 и поступает- на суммирующее устройство 3, где суммируется с выходными сигналами первого переключателя 11 и блока 2 умножения.
Поскольку момент срабатывания сигнум-реле 10 определяется текущей - ошибкой системы, нелинейное корректирующее устройство формирует три сигнала управления Uj t 25 функции текущей ошибки U, системы.
Тем самым обеспечивается оптимальный переходный процесс с учетом
электромагнитной постоянной времени двигателя 4 с нагрузкой. При ошибке системы, равной нулю, нуль-орган 16 сбрасывает в ноль пиковый детектор 7 и управляемый дифференциатор 18, а
также кратковременно размыкает ключ 21 для предотвращения прохождения помехи в момент отключения уцравляемо- го дифференциатора IP.
Предлагаемьй алгоритм работы получить оптимальный разгон
и торможение с учетом электромагнитной постоянной Т двигателя 4 с нагрузкой.
Двигатель 4 с нагрузкой имеет пе- редаточную функцию вида
и rT,lIllE) f ,
Р и;(рТ- (т,т-);ТТ1
где ) - передаточная функция двигателя 4 с нагрузкой на валу.
Дифференциальное уравнение, описывающее поведение системы с учетом (1), примет вид
,1Т,
А . К.4
iJ4+
(2)
Переходный процесс, вызванный
ступенчатым воздействием g, называ-
ется оптимальным, если он является монотонным и время переходного процесса имеет минимально возможное значение Тд,„ц , совместимое с огргни 51А255946
чителем, наложенным на значение 4ТяТм Г-/ 9 f Тмич-.
корения . УскорениеIii / сохраня- з 2pAt--j--) + ет -свое максимально возможное зна-(8)
чение в течение периода разгона и + g(t - Тд,„ц )1 + U, , тормоя|ения,
В этом случае оптимальная переда- где
точная функция разомкнутой системы4(Тя+Тм)Г f о /.. Тминч
равна ти кД 2
П°ГгчУ
(p)(t-T..H) ,.
д -Тйшйр т р (3)
..(1-2е е )В первом режиме, когда ,/
. . .-... , о,5и,.и„„ очевидно равно
р (, -2. ...„ .Ш..1Ь),(,,Лй,. (,0)
IOj. - /ИИЧ М
где ) - оптимальная передаточная „ „ /
. ./Для скачка p(t) р и с учетом
функция двигателя ч с /-.v
:;(4), получают ,
нагрузкой}20
л(р) оптимальный-ВЫХОДНОЙ„ Та Т ,1:. , 1 /.4
,U .,. „- ;7 I d vii/
сигнал двигателя К,) К
нагрузкой,U7 I Г
Для определенного оптимального «« втором режиме, когда
процесса Тд,цц определяется выраже - 25
jjjjgj ,,5117, выражение для U принимает
р--,вид
„ - (Тя+т«)
V ,, iIgU.(t)-2.(t.Ifl.)j
мин 1 L/
Дифференциальное уравнение, опи- 4(Т4+Тм)
сывающее поведение разомкнутой опти- «
мальной системы (З) принимает каТдая скачка g(t - luSH.) g.
Т Т j
U4 2- -{u,t) -2U, )+. С учетом (4) получают
- «ixt-t..). jt-- k(t)- (5) - sr «
. мин
. .tт°f т ЛОбозначая I U полубайт.
2U4 (t - ) + U (t - Т„„к )J. 4QK.4
U,5-U,o + --U4, прии,5|и,/эг0, (U) 25 -U, + --U4. приО,05и,,5и; .(15)
.
Таким образом (14) и (15) описыДифференциальное уравнение замкнутой системы с (5) принимает- вид
45
и; ) -2g ( L .
„ L вают соответственно оптимальный раз f f 5гон и торможение с ускорением
Тд,цц Л 9 . ,,. V V
, .,JH IMiSlOгде p(t) - входное задание системы,I I т + т
g(t) « U,(t) u;(t).50 «
Продифференцировав (6), получаютс учетом (14), (15) и (3) вьфажение
(8) для и записывается при U г
и: « 5/-- g(t) - 2g(t ) /UJ 0,5U,
1 55 и, %2«|uJ L;(t.)-2p()l+
g(t - т„«„ )J . .. J .
Дифференциальное уравнение (2)1 .
с учетом (б) н (7) имеет вид °
7 при 0, JU,/iO,5U
и, -|; (t) -2g()- U,,
Принимая во внимание, что момент времени t О соответствует выработ- 10 ке сигнум-реле 10 положительного ступенчатого сигнала, а момент времени t соответствует выработке
отрицательного ступенчатого сигна- 15 ла, получают описанный алгоритм работы предлагаемого нелинейного корректирующего устройства.
На фиг.2 показана эпюра управляю- 20 щего напряжения U, в функции относительной ошибки рассогласования сие-
0,025 с.
темы для К4 50, Т Т 0,025 с, 400 g(t) 1.
Таким образом, предлагаемое изоб- 25 ретение позволяет повысить быстродей- ствие, уменьшить энергоемкость, улуч- пмть качество переходног,о процесса .с учетом электромагнитной постоянной времени исполнительного двигате- 30 входом делителя блока деления.Нелинейное корректирующее уст ство по авт.св. № 1126925, о т л ч ающ.е е с я тем, что, с цел уменьшения энергоемкости устройс повьш1ения точности устройства и уменьшения перерегулирования в устройстве, в нем дополнительно тановлены последовательно соедин ные управляемый дифференциатор, второй усилитель, блок деления, и третий сумматор второй вход к рого соединен, с выходом первого ключателя, а выход является инфо мационным выходом устройства, уп ляющий вход ключа соединен с вых нуль-органа и первым управляющим входом управляемого дифференциат информационный вход которого явл ся информационным входом устройс по заданию, а второй управл5пощий вход подключен к выходу сигнум-р выход пикового детектора соедине
Г
1425594
входом делителя блока деления.ля за счет обеспечения режимов разгона и торможения с максимально допустимым ускорением.
Формула изобретения
Нелинейное корректирующее устройство по авт.св. № 1126925, о т л и- ч ающ.е е с я тем, что, с целью уменьшения энергоемкости устройства, повьш1ения точности устройства и уменьшения перерегулирования в устройстве, в нем дополнительно установлены последовательно соединенные управляемый дифференциатор, второй усилитель, блок деления, ключ и третий сумматор второй вход которого соединен, с выходом первого переключателя, а выход является информационным выходом устройства, управляющий вход ключа соединен с выходом нуль-органа и первым управляющим входом управляемого дифференциатора, информационный вход которого являет- ся информационным входом устройства по заданию, а второй управл5пощий вход подключен к выходу сигнум-реле, выход пикового детектора соединен с
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
