Изобретение относится к области автоматического управления и может быть использовано в позиционных системах программного управления.
Известны двухканальные системы позиционирования квадрантных углов, содержащие последовательно соединенные задающий блок, фазочувствительный усилитель и исполнительный двигатель, вал которого связан с рабочим органом и датчиком обратной связи. Датчик обратной связи выполнен в виде синуснокосинусного поворотного трансформатора, одна выходная обмотка которого подключена ко входу задающего блока. Недостатками этих систем являются их сложность, низкая надежность и узкий диапазон позиционирования Квадрантных углов.
Предлагаемая система отличается от известных тем, что поворотный трансформатор содержит дополнительную обмотку, подключенную ко входу задающего блока, к другому входу которого подключена другая выходная обмотка поворотного трансформатора.
Такое выполнение системы позволяет упростить ее, повысить надежность и расщирить диапазон позиционирования квадрантных углов.
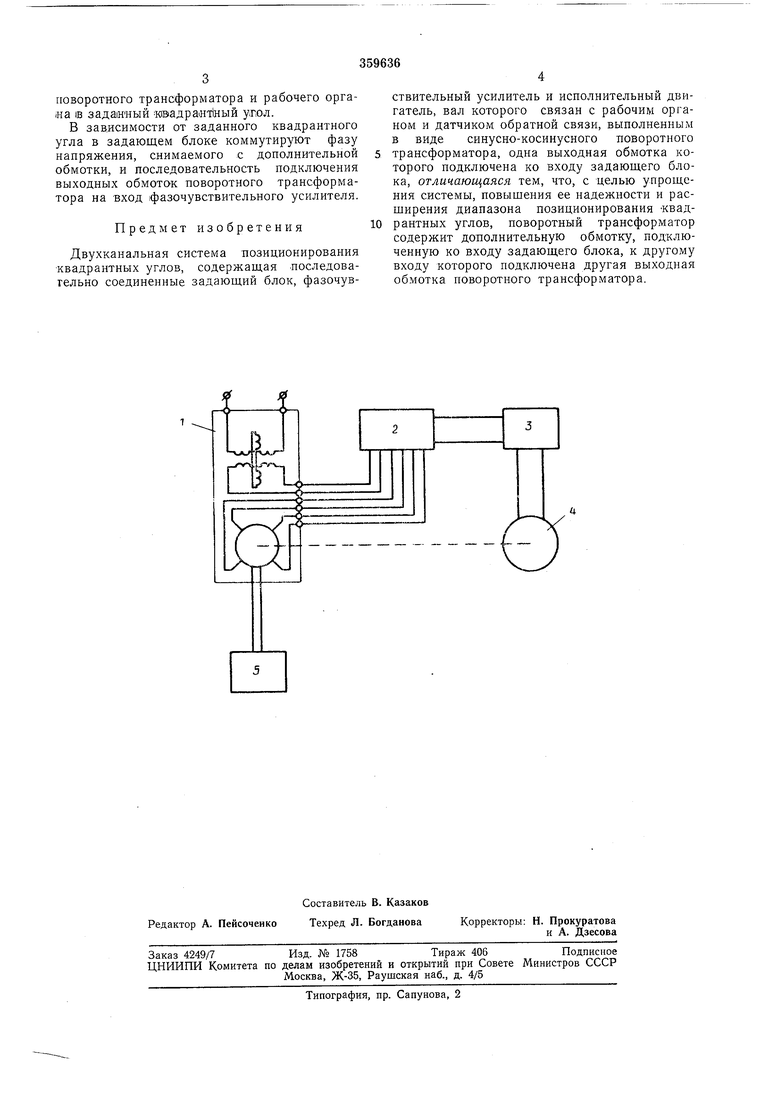
Система содержит поворотный трансформатор /, задающий блок 2, фазочувствительный усилитель 3, исполнительный двигатель 4 и рабочий орган 5.
В задающем блоке 2 формируется управляющий сигнал для приведения рабочего органа 5 в заданный квадрантный угол. С выхода задающего блока напряжение рассогласования между напряжениями дополнительной
обмотки и одной из выходных обмоток трансформатора }, например синусной (косинусной), поступает на вход усилителя 3. С усилителя сигнал подается на управляющую обмотку двигателя 4, который отрабатывает
ротор поворотного трансформатора и соединенный с ним рабочий орган в сторону уменьщения сигнала на входе усилителя. Таким образом осуществляется грубое приведение рабочего органа в заданное угловое положение.
При подходе напряжения рассогласования к наименьщему значению в задающем блоке 2 происходит коммутация обмоток и на вход усилителя 3 поступает напряжение только с косинусной (синусной) обмотки поворотного
трансформатора, которая находится при этом около положения электрического нуля. Так как крутизна синусоидального сигнала около положения нуля наибольщая, то двигатель осуществляет более точное приведение ротора
поворотного трансформатора и рабочего оргаina IB задаиный Ювадраитйый угол.
В зависимости от заданного квадрантного угла в задающем блоке коммутируют фазу напряжения, снимаемого с дополнительной обмотки, и последовательность подключения выходных обмоток поворотного трансформатора на вход фазочувствительного усилителя.
Предмет изобретения
Двухканальная система позиционирования квадрантных углов, содержащая .последовательно соединенные задающий блок, фазочувствительный усилитель и исполнительный двигатель, вал которого связан с рабочим органом и датчиком обратной связи, выполненным в виде синусно-косинусного поворотного трансформатора, одна выходная обмотка которого подключена ко входу задающего блока, отличающаяся тем, что, с целью упрощения системы, повышения ее надежности и расширения диапазона позиционирования «вадрантных углов, поворотный трансформатор содержит дополнительную обмотку, подключенную ко входу задающего блока, к другому входу которого подключена другая выходная обмотка поворотного трансформатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU312238A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Дискретный замкнутый электропривод | 1983 |
|
SU1159146A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| СЧЕТНО-РЕШАЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU408325A1 |
| Преобразователь перемещения в код | 1976 |
|
SU693415A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1968 |
|
SU217485A1 |
