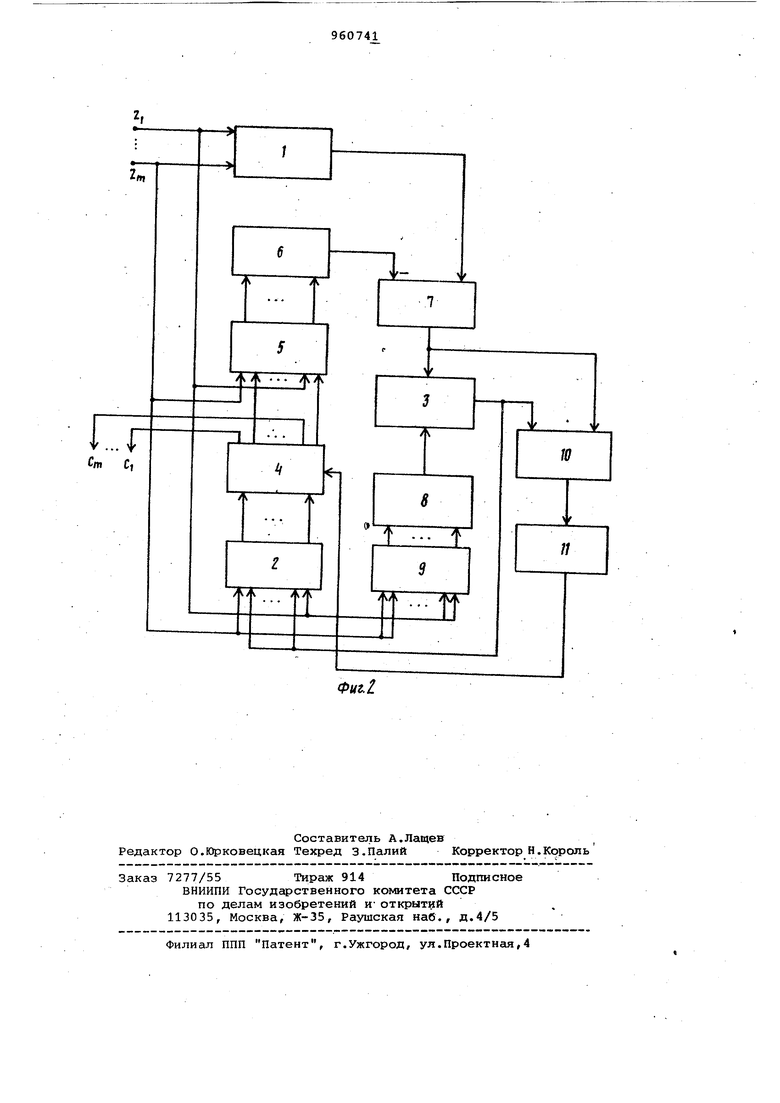
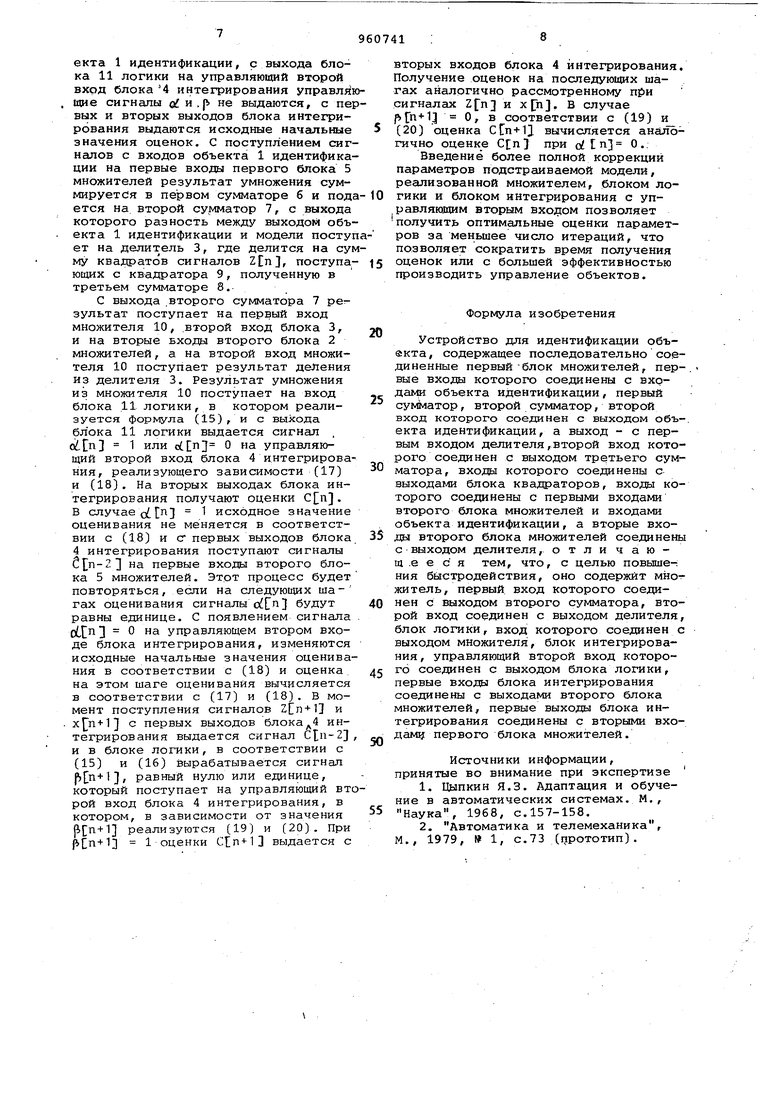
Изобретение относится к. управлени стационарными и нестационарными объектами и может найти широкое применение при проектировании систем и испытаниях различных объектов. Известно устройство идентификации линейного объекта Ijr описываемого в векторном виде : , , (1) где С - вектор параметров объекта; Т- вектор фазовых координат, основанный на коррекции параметров подстраиваемой модели сигналом, пропорциональным интегралу разности сиг налов с выхода объекта и подстраивае мой модели. Минимизируется квадратич ный показатель качества: 3(C)-(X n -ctvi:iCn3f) по следующей итерационной формуле ij-p4:-f-(xCn:)-C Cn-nxCnmtn IliuiJII f3) или в непрерывном варианте (izwiP . Д4) Известен также способ идентификации линейного объекта с временной корреляцией входных сигналов, основанный на коррекции параметров подстраиваемой модели сигналом, зависящим от соотношения расстояния от исходного начального значения оценки на (n-l)-oM шаге оценивания до п-ой гиперплоскости и до (п-1)-ой гиперплоскости так, что если расстояние до п-ой гиперплоскости больше расстояния до (п-1)-ой гиперплоскости,, то сигнал пропорционален интегралу разности сигналов с выхода объекта и подстраиваемой модели, начальное значение оценки для п-го шага оценийания берут равным исходному начальному значению оценки на (п-1)ом шаге оценивания, а если расстояние до (п)-ой гиперплоскости меньше или равно расстоянию до (п-1)-ой гиперплоскости, то сигнал на п-ом шаге оценивания пропорционален интегралу разности с выхода объекта и подстраиваемой модели, а за начальное значение оценки для п-го шага оценивания и за исходное начальное значение оценки на п-ом шаге оценивания берут оценку на (п-)-ом шаге оценивания.В результате идентификацию прово дят по формулам гг -, . ХГУ1 -еСУ1-13: :иЗ cw-ctn-o.хЧизи. c vi-o--cin-n-Ki :n- ict«-ii-ctn-i) (6) лг т 51, ec HfJ Ccrn-llicCvia pHein-l V 1см-гз)Г7) 10, в других случаях, r.Q пЧгГжтггкт CxlI l-gCmJICK ,д, где р (.cLm.cCK --TLTIK ZCK квадрат - расстояния от исходного значения CfmJjyiH К-го шаг оценивания до К-ой гиперплоскости f2 Недостатком способа идентификации линейного объекта по формулам (3) и (4) является относительно невысокое быстродействие при сил ной временной корреляции и, следовательно, невысокая точность оценивания при дрейфе параметров. Способ идентификации линейного объекта по формулам (5) - (8) дает повышенное быстродействие при сильной временной корреляции Ztn, однако неполностью использует возможности для увеличения скорости сходимости в случаях, когда ci(n) 0, переходя к вычислению оценки по фор мулам (3) и 4). Наиболее близким к предложенному является устройство для идентификации объекта, содержащее последовательно соединенные первый блок множ телей, первые входы которого соединены с входами объекта, первый сумматор, второй сумматор, второй вход которого соединен с выходом объекта а вход соединен с первым входом делителя, второй вход которого соединен с выходом третьего сумматора,вх ды которого соединены с выходами блока квадраторов, входы которого соединены с первыми входами второго блока множителей и входами объекта, а вторые входы второго блока множителей соединены с выходом делителя С21. Недостаток известного идентификатора - низкое быстродействие. Цель изобретения - повышение быс тродействия. Для достижения цели идентификато содержит множитель, первый вход которого соединен с выходом второго сумматора, второй вход соединен с выходом делителя, блок логики, вход которого соединен с выходом множителя, блок интегрирования, управляю щий второй вход которого соединен с выходом блока логики, первые входы блока интергирования соединены с выходами второго блока множителей, первые выходы блока интегрирования соединены с вторыми входами первого блока множителей. Коррекцию оценки пpиalCnJ О проводят следующим образом. Если расстояние от исходного начального значения оценки до ()-ой гиперплоскости больше расстояния до {п-1)-ой гиперплоскости, то за начальное значение оценки для (п+1)-го шага оценивания берут исходное начальное значение оценки на (п-1)-ом шаге оценивания, а сигнал коррекции на (п+1)-ом шаге оценивания пропорционален интегралу разности сигналов с выхода объекта и подстраиваемой модели . Здесь дополнительно введена коррекция параметров подстраиваемой модели при oi f nj О и при расстоянии от исходного начального значения оценки до (п+1)-ой гиперплоскости, большем расстояния до (п-1)-ой гицер плоскости. В результате идентификацию проводят по формулам .-l3. - ztSziH (9) Crv,(etH-2 -CCM-13) (10) 1,еслмр(й-2 ,сгм-и) , в других случаях CEHH,...O(12) (6ln-l -ctH)(1) ,если„1Су.-о,р(,)7 (14) P { th-aj,nH) о, случаях , где f(,y.mi:L - исходное начальное значение оценки. На фиг.1 представлена геометрическая интерпретация для двумерного случая; на фиг.2 - функциональная схема предлагаемого устройства. Точка ,- исходное начальное значение оц&нки, остается постойнной до тех пор, пока расстояние от нее до очередной гиперплоскости возрастает, а меняется тогда, когда расстояние от нее до п-ой гиперплоскости будет меньше или равно расстоянию до (п-1Jой гиперплоскости, становясь равной своей проекции на (п-1)-ую гиперплоскость. В этом случае за оценку на п -ом шаге берут проекцию оценки на (n-l)-oM шаге оценивания на п-ую ги.перплоскость, и исходное начальное значение СцдГ- становится равным . Это соответствует способу идентификации по формулам (5) - (8) В случае расстояния до п-ой гиперплоскости , Меньшем или равном расстоянию до (п-1)-ой гиперплоскости, сравнивают расстояние от б,(оС1до (п+1)-ой гиперплоскости с расстоянием до Сп-1)-ой гиперплоскости и если последнее меньше, то исходное начальное значение остается равным за оценку на п-ом шаге берут проекцию оценки на (п-1)-ом шаге оц нивания на п-ую гиперплоскость, а за оценку на (n-i-l)-oM шаге оценивания берут проекцию исходного начального значения бкоС- на (п--1)-ую гиперплоскость, если же расстояние от (п+1)-ой гиперплоскости меньше расстояния до Сп-1)-ой гиперплоскости j то исходное начальное значение СкоС- перемещается в точку Cfn-1J, оценка на п-ом шаге оценивания равна проекции на п-ую гиперплоскость, а оценку на (n+l)ом шаге ищут, сравнивая расстояния от до п-ой и (п+1)-ой гиперплоскостей. В данном случае исходным начальным значением оценки до четвер того шага оценивания остается СкоЕ- .Так как расстояние от ДО пятой гиперплоскости меньше расстояния до четвертой, то за оценку на.пятом шаге оценивания берут проекцию оцен ки на четвертом шаге оценивания на пятую гиперплоскость (Сд, ) . До этого шага оценивания оценки предла гаемого способа (CK) и известного способа (С) совпадают. Так как ра стояние от CKQ. до шестой гиперплосТ ости больше расстояния до четвертой то Сцо -Достается исходной начальной оценкой для шестого шага оценивания и оценка на шестом шаге оце.нивания будет равна , , а так как расстояние от седьмой гиперплоскости меньше расстояния до шестой, то исходным начальным значением оценки для седьмого шага оценивания становится С, а оценка на седьмом шаге оценивания будет равна . Согласно известному способу идентификации оценка на шестом шаге оценивания равна С, исходным начальным значением для седьмого шага оценивания будет Cj,, а оценка на седьмом шаге оценивания равна С, искомое решение. Изобретение повышает быстродействие, так как более.полно используются возможности коррекции параметров подстраиваемой модели. Дополнительное введение блока интегрирования с управляющим входом, блока логики и множителя существенно повышает быстродействие идентификации. Блок логики реализует зависимосм,еслирЧсСи-г,М)яче1и-2 Д ц.о)ц5) 0,6 Других c vчasl -(,ecAMdi M o,94 i:M-i,ct), |bt«4l - 7p(eLn-2.b,-1) OibAPvrMx, и выдает сигналы и . ка управляющий начальными условиями вход блока интегрирования, реализующего зависимости ..з. .Sr: xtv,: IIZtM3ll c vi-l --c|:v,Hl + ithU6th-2 -Cl iH) (18) см-Ь,.-г& 1ь|щлл11 -zLHvi с1 1 --с1:ч1--рси4О(.с1и-2 -сСи). Входные сигналы объекта 1 идентификации поступают на первые входы второго блока 2 множителей, вторые входы которого соединены с выходом делителя 3, а выходы соединены с первыми входами блока 4 интегрирования, первые выходы которого Соединены с вторыми входами первого блока 5 множителей, первые входы которого соединены с входами объекта 1 идентификации, а выходы соединены с входами первого сумматора 6. Выход второго сумматора 7, первый вход которого - вычитающий соединен с выходом первого сумматора б, а второй выход соединен с выходом объекта идентификации, соединен с первым входом делителя 3, второй вход которого соединен с выходом третьего сумматора 8, входы которого соединены с выходом блока квадраторов 9, входы которого соединены с входами объекта 1 идентификации. Первый вход множителя 10 соединен с первым входоК1 делителя 3, а второй вход множителя 10 соединен с выходом делителя 3, а выход соединен с входом блока 11 логики, выход которого соединен с управляющим вторым входом блока 4 интегрирования, а вторые выходы блока 4 интегрирования служат выходами устройства и на них получают оценки параметров объекта 1 идентификации. Устройство работает следукядим образом. В исходном состоянии, при отсутствии сигналов с входов и выхода объекта 1 идентификации, с выхода блока 11 логики на управляющий второй вход блока 4 интегрирования управлйю щие сигналы of и .ь не выдаются, с пер вьах и вторых выходов блока интегрирования выдаются исходные начальные значения оценок. С поступлением сигНсшов с входов объекта 1 идентификации На первые входы первого блока 5 множителей результат умножения суммируется в первом сумматоре б и пода ется на второй сумматор 7, с выхода которого разность между выходой объекта 1 идентификации и модели поступ ет на делитель 3, где делится на сум му квадратов сигналов ZtnJ, поступающих с квадратора 9, полученную в третьем сумматоре 8. С выхода .второго сумматора 7 ре зультат поступает на первый вход множителя 10, .второй вход блока 3, и на вторые входы второго блока 2 множителей, а на второй вход множителя 10 поступает результат деления из делителя 3. Результат умножения из множителя 10 поступает на вход блока 11 логики, в котором реализуется формула (15) , и с выхода блока 11 логики выдается сигнал , 1 или О управляющий второй вход блока 4 интегрирования, реализующего зависимости (17) и (18). На вторых выходах блока интегрирования получают оценки . в случае ( 1 исходное значение оценивания не меняется в соответствии с (18) и С первых выходов блока 4 интегрирования поступают сигналы на первые входы второго блока 5 множителей. Этот процесс будет повторяться, если на следуюьщх шагах оценивания сигналы OLГп будут равны единице. С появлением сигнала ot.t О на управляющем втором входе блока интегрирования, изменяются исходные начальные значения оценивания в соответствии с (18) и оценка на этом шаге оценивания вычисляется в соответствии с (17) и (18). В момент поступления сигналов ZCn+l и . xfn+l с первых выходов блокад4 интегрирования выдается сигнал Ctii-2 и в блоке логики, в соответствии с (15) и (16) вырабатывается сигнал , равный нулю или единице, который поступает на управляющий вто рой вход блока 4 интегрирования, в котором, в зависимости от значения реализуются (19) и (20). При 1 оценки С1п + 1 выдается с вторых входов блока 4 интегрирования. Получение оценок на последующих шагах аналогично рассмотренному п&и сигналах Zfn и . В случае pth-t-1. О, в соответствии с (19) и (20) оценка Cfn+IJ вычисляется аналогично оценке при oi ЕП 0.. Введение более полной коррекций параметров подстраиваемой модели, реализованной множителем, блоком логики и блоком интегрирования с управляющим вторым входом позволяет получить оптимальные оценки параметров за меньшее число итераций, что позволяет сократить время получения оценок или с большей эффективностью производить управление объектов. Формула изобретения Устройство для идентификации объекта, содержащее последовательно соединенные первыйблок множителей, пер-, вые входы которого соединены с вхрдагли объекта идентификации, первый сум1матор, второй сумматор, второй вход которого соединен с выходом объ-. екта идентификации, а выход - с первым входом делителя,второй вход которого соединен с выходом третьего сумматора, входы которого соединены с выxoдa ш блока квадраторов, входы которого соединены с первыми входами второго блока множителей и входами объекта идентификации, а вторые входа} второго блока множителей соединены с выходом делителя,отличающ .е е с я тем, что, с целью повышения быстродействия, оно содержит множитель, первый вход которого соединен с выходом второго сумматора, второй вход соединен с выходом делителя, блок логики, вход которого соединен с выходом множителя, блок интегрирования , управляющий второй вход которого соединен с выходом блока логики, первые входы блока интегрирования соединены с выходами второго блока множителей, первые выходы блока интегрирования соединены с вторыми входам первого блока множителей. Источники информации, принятые во внимание при экспертизе 1.Цыпкин Я.З. Адаптация и обучение в автоматических системах. М., Наука, 1968, с.157-158. 2. Автоматика и телемеханика, М., 1979, 1, С.73 (11РОТОТИП).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для идентификации линейного объекта | 1981 |
|
SU1012209A1 |
| Устройство для идентификации линейного объекта | 1986 |
|
SU1374184A1 |
| Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости | 1986 |
|
SU1432457A1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАСТЕРИЗАЦИИ ОБЪЕКТОВ | 2014 |
|
RU2586025C2 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2366070C1 |
| Статистический анализатор | 1990 |
|
SU1698892A1 |
| Система идентификации параметров объекта | 1983 |
|
SU1156001A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА КАНАЛА СВЯЗИ | 2002 |
|
RU2216865C1 |
| СИСТЕМА ОЦЕНИВАНИЯ ПОМЕХОЗАЩИЩЕННОСТИ НАВИГАЦИОННОГО КОНТУРА ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ (ИСЗ) | 2010 |
|
RU2444752C1 |