1
Изобретение относится к области автоматики и может найти применение при проектировании систем автоматического управления объектами с переменными параметрами в режимах пуска, иормальной работы и останова.,
Известны системы управления нестационарным объектом с моделью, содержащие модель объекта управления, регулятор, блок самонастройки и объект управлення 1. Однако, в таких системах не производится коррекция модели объекта (оценка переменных состояния), что значительно ограничивает применение таких систем в случаях, когда необходимо производить управление ненаблюдаемых координат объекта. Кроме того, данная система управления не позволяет производить управление в различных режимах работы, когда происходит изменение структуры объекта управления. Из известных систем наиболее близкой по технической сущности является устройство для управления многомерным объектом по сигналам оценок его фазовых координат (оценок переменных состояний), содержащее блок моделей чувствительных элементов, выход которого соединен с первым входом блока сумматоров, второй вход которого соединен с выходом блока чувствительных элементов, первый выход блока сумматоров соединен через блок инвертирующих усилителей с.первым входом блока управления (2). Недостатком известной системы является то, что при автоматическом управлении объектом в различных режимах работы происходит изменение не только параметров модели объекта управления, но и структуры. Поэтому данная, система не позволит
производить управлениев режимах пуска, нормальной работы и останова, так как используется модель объекта управления с постоянной структурой.
Целью изобретения является расширение области применения устройства для
управления многомерным нестационарным объектом.
Поставленная цель достигается тем, что устройство содержит вычислительный блок, обобщенную модель объекта управления и
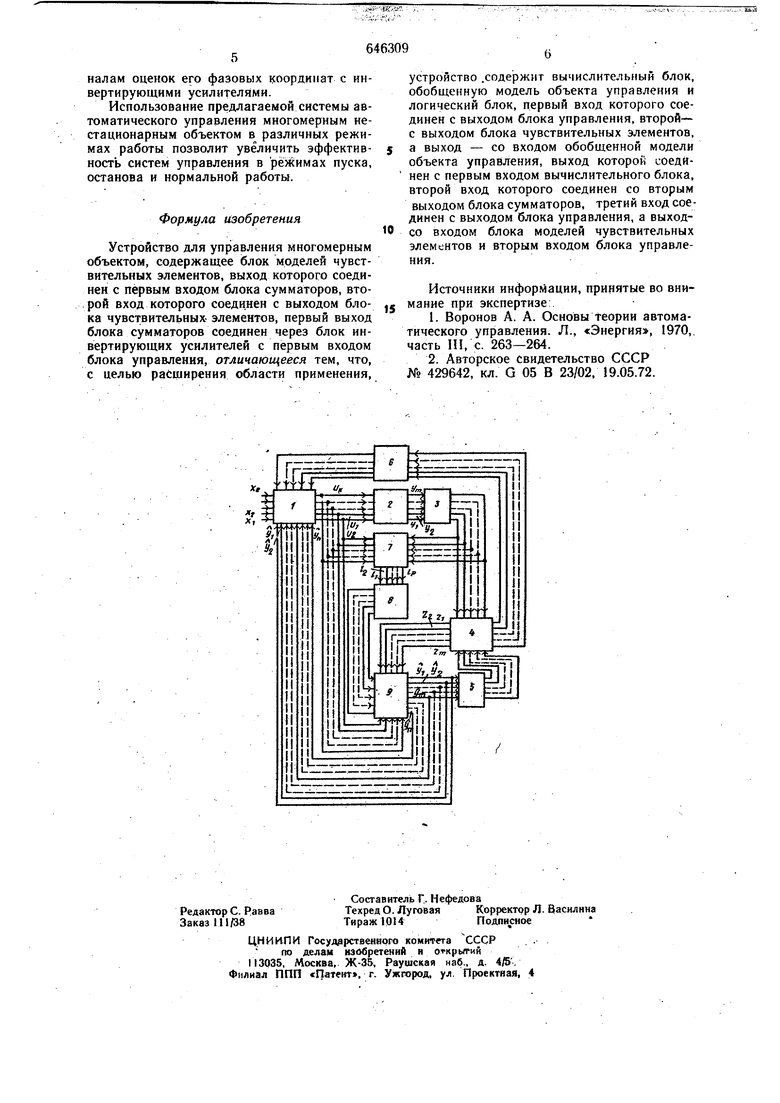
логический блок, первый вход которого соединен с выходом блока управления, второй- с выходом блока чувствительных элементов, а выход со входом обобщенной модели объекта - управления, выход которой соединен с первым входом вычислительного блока, второй вход которого, соединен со вторым выходом блока сумматоров, третий вход соединен с выходом блока управления, выход - со входом блока моделей чувствительных элементов и вторым входом блока управления. На чертеже представлена блок-схема предлагаемого устройства для управления многомерным нестационарным объектом в различных режимах работы, содержащего: блок управления I, объект управления 2, блок чувствительных элементов 3, блок сумматоров 4, блок моделей чувствительных элементов 5, блок инвертирующих усилителей 6, логический блок 7, обобщенная модель объекта управления 8 и вычислительный блок 9. Кроме того, на чертеже обозначены: задающне воздействия Х(, )fe,.,.,Xf, управляющие воздействия Ц, Ufe,..., tJ«, выходные сигналы фазовых координат YI , ,...,«, оценок фазовых координат YI , Vj .....,Ym, логическне переменные fi, ,...,р н сигналы рассогласования 2 , Zb,...., Z«. Устройство работает следующим образом. Задающие воздействия Xi . Хг ,...,Хв поступают на основные входы блока управления 1,0 выхода блока управления 1 управляющие воздействия tJi, Ц,...,ик поступают на входы нестационарного объекта управления 2 и На первые входы логического блока 7 и основные входы вычислительного блока 9. Выходные снгналы фазовых координат YI, YS ,..., YB, объект1а управлення 2 измеряются с помощью блока чувствительных элементов 3 н подаются На первые входы блока сумматоров 4. Сигналы оценок измеренных фазовых координат i, 9,..., в. с выходов вычислительного блока 9 через блок моделей чувствительных элементов 5 подаются на вторые входы блока сумматоров 4. С выходов блока сумматоров 4 сигналы рассогласования Zt, Z),...,Zn измеренных фазовых координат YI , Yz,..., Ym объекта управления н соотв ствующих им сигналов оценок YI , Yz,..., Y« фазовых координат подаются на первые входы вычислительного блока 9 для корр1екцин сигналов оценок ,всех фазовых координат YI , «,..., ..Y(,,... Y, объекта управлення. Сигналы оценок всех фазовых коордннат YI , Ya,..., Y(n,...,b( объекта управления с выходов вычислительного блока 9 подаются на первые входы блока управления 1 вШДе сигналов обратных связей для формирования сигналов управляющих воздействий Ц , ,.-..Un. С выходов блока сумматоров 4 сигналы рассогласования Z| , Zt,,..., Zm измеренных фазоШх координат YI , Y,..., Y« объекта управления с выходов блока чувствительных элементов 31 и соответствующих им сигналов оценок YI , 12 ,.,%|| фазовых коордннат с выходов блока моделей чувствительных элементов 5 подаются дополнительно через блок инвeptиpyющиx усилителей 6 на вторые входы блока управления 1 для формирования управляющих воздействий Ц, 14,...Д. На второй вход логического блока 7 поступают сигналы измеренных фазовых координат YI , Y2 ,...,Y,4 объекта управлення с выходов блока чувствительных элементов 3. Выходные, снгналы логического блока 7 поступают на входы обобщенной модели объекта управления 8, а выходные снгналы обобщенной модели 8 поступают на второй вход вычислительного блока 9. Дополнительным подключением к устройству для управления логического блока 7, обобщенной модели 8 н вычислительного блока 9 обеспечивается формирование модели объекта управления при изменении его структуры, что происходит в таких режимах как пуск, останов, выход в безопасный режим работы н т. д. В логическом блоке 7 происходит опре деление логических переменных , ,...,Ef на основании условий изменения логических Переменных, записанных, например в виде при и/ U3«j ; при Uj Ujag при Yj У(в, ; при YJ Y3oj. Лргические переменные , |,..., ( поступают в обобщенную модель объекта управления 8, где на основании условий существования управляющих воздействий Ц , Ц ,..., Uit и фазовых координат YI , Ya,..., Yw Lj 1, О, (Ui при при Ь Lj 1, при О при Lj Oj функции логических переменных) н обобщенной модели объекта управления, представляющей собой математическое описание объекта управлення в аналитнческом виде в режиме функционирования всех возможных управляющих .воздействий Ц , Ц , ...,Uw и координат YI , Уг,..., Ym формируется аналитическая рабочая модель объекта уПра1вления. Вычислительный блок 9 на основании аналитической модели, поступающей нз блока 8 и управляющих воздействий Ц , Цг,..., У Производит вычисление рабочей модели объекта управления. После вычисления рабочей модели объекта управления, т. е. после установления определенной структуры объекта управлення 2 и, в соответствии с этим, рабочей модели, объекта управлення, работа системы управления аналогична системе управления многомерным нестацнонарным объектом по сигналам оценок его фазовых координат с инвертирующими усилителями. Использование предлагаемой системы автоматического управления многомерным нестационарным объектом в различных режимах работы позволит увеличить эффективность систем управления в режимах пуска, останова и нормальной работы. Формула изобретения Устройство для управления многомерным объектом, содержащее блок моделей чувствительных элементов, выход которого соединен с первым входом блока сумматоров, второй вход которого соединен с выходом блока чувствительных- элементов, первый выход блока сумматоров соединен через блок инвертирующих усилителей с первым входом блока управления, отличающееся тем, что, с целью расширения области применения. устройство .соде|эжит вычислительный блок, обобщенную модель объекта управления и логический блок, первый вход которого соединен с выходом блока управления, второй- с выходом блока чувствительных элементов, а выход - со входом обобщенной модели объекта управления, выход которой соединен с первым входом вычислительного блока, второй вход которого соединен со вторым выходом блока сумматоров, третий вход соединен с выходом блока управления, а выходсо входом блока моделей чувствительных элементов и вторым входом блока управления. Источники информации, принятые во внимание при экспертизе: 1.Воронов А. А. Основы теории автоматического управления. Л., «Энергия, 1970, часть И, с. 263-264. 2.Авторское свидетельство СССР № 429642, кл. G 05 В 23/02, 19.05.72.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМЕРНЫМ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ1^ГНЛ"ФОВД | 1972 |
|
SU429642A1 |
| МНОГОМЕРНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1974 |
|
SU429640A1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU429415A1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ ИМПУЛЬСНОГО ШУМА ПРИ ОБРАБОТКЕ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2010 |
|
RU2449355C2 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
