Область техники, к которой относится изобретение
Изобретение относится к области приборостроения и может быть использовано при создании бесплатформенных инерциальных навигационных систем, водящих в состав инерциального навигационного комплекса для высокоскоростного маневренного объекта [1].
Используемые термины
Для существенного сокращения текста описания и формулы целесообразно перечислить используемые термины применительно к заявляемому изобретению:
Объект - движущееся в пространстве управляемое тело с целенаправленным перемещением из одной области пространства в другую;
Полюс объекта - точка, для которой определяются переменные его поступательного движения - это, как правило, начало связанной с ним системы координат; в частности, полюсом объекта может быть его центр масс;
Связанная система координат - система координат, связанная с осями чувствительности (измерительными осями) инерциального датчика;
Объектная система координат - связанная с объектом система координат, начало которой совмещено с его полюсом, оси которой направлены в соответствии с задачами управления его движением;
Земная географическая система координат - связанная с Землей система координат, начало которой находится на поверхности Земли (в частности, совпадает с точкой начала движения объекта), первая ось направлена на Восток, вторая - на Север, третья - в зенит;
Земная геоцентрическая система координат - связанная с Землей система координат, начало которой помещено в центр сферической Земли, оси образуют правую тройку, при этом первая ось пересекает нулевой меридиан, третья ось направлена на Север (вдоль этой оси направлен вектор угловой скорости суточного вращения Земли);
Инерциальная система координат - связанная с абсолютно неподвижной в пространстве системой отсчета, оси которой образуют правую тройку и в начальный момент времени наблюдения за движением объекта параллельны осям земной геоцентрической системы координат;
Инерциальный датчик - электро-электронно-механическое устройство, выходные сигналы которого зависят от кинематических характеристик движения объекта и от конструктивных характеристик и принципов работы датчика, в заявляемом устройстве - это кориолисовый вибрационный гироскоп камертонного типа, подвес которого жестко связан с корпусом посредством двадцати датчиков сил, выходы которых подключены к встроенному компьютеру по беспроводной технологии передачи информации;
Встроенный компьютер - это вычислительное устройство, встроенное в инерциальный датчик или входящее в состав бортового компьютера, в котором хранится информация о структуре инерциального датчика и в который инсталлировано программное обеспечение для процедуры определения реакций опор подвеса кориолисова вибрационного гироскопа на основе обработки сигналов датчиков сил, то есть вход во встроенный компьютер - это сигналы датчиков сил, а его выход - три проекции вектора силы реакции подвеса и три проекции вектора момента в связанной с инерциальным датчиком системы координат;
Первичная информация - это совокупность сигналов датчиков сил, установленных в опорный узел подвеса кориолисова вибрационного гироскопа камертонного типа; на основе этой информации вычисляются три проекции вектора силы реакции подвеса и три проекции вектора момента реакции подвеса;
Инерциальная информация - это совокупность тридцати переменных, вычисляемых на основе первичной информации пяти инерциальных датчиков, каждый из которых построен на кориолисовом вибрационном гироскопе камертонного типа с датчиками силы, установленным в опорный узел его подвеса; указанные тридцать переменных инерциальной информации - это: три проекции вектора абсолютной угловой скорости объекта, три проекции абсолютного углового ускорения объекта, три проекции вектора кажущегося ускорения полюса объекта, три проекции вектора скорости полюса объекта, девять произведений проекций вектора абсолютной угловой скорости объекта друг на друга и девять произведений проекций вектора абсолютной угловой скорости объекта на проекции вектора скорости полюса объекта; все указанные проекции - на оси объектной системы координат, определение переменных инерциальной информации сводится к решению системы линейных алгебраических уравнении тридцатого порядка;
Навигационная информация - переменные, на основе которых осуществляется управление движением объекта, в заявляемом устройстве - это пятнадцать переменных: переменные ориентации объекта от базовой (например, земной географической системой координат) к объектной системе координат (это, например, девять направляющих косинусов), три проекции вектора скорости полюса объекта и три проекции радиуса-вектора полюса объекта (то есть три координаты объекта) в базовой системе координат;
Функция управления движением объекта - в заявляемом устройстве это сумма средневзвешенных модулей разностей определяемых бесплатформенной инерциальной навигационной системой переменных навигационной информации и соответствующих функций времени, задающих требуемые программные движения объекта, то есть функция управления движением объекта представляет собой рассогласование реальных и программных движений объекта, которое система управления его движением должна сводить к нулю в каждый текущий момент времени;
Блок инерциальной информации - устройство, состоящее из пяти инерциальных датчиков, каждый из которых построен на кориолисовом вибрационном гироскопе камертонного типа, по два инерциальных датчика установлены вдоль двух взаимно перпендикулярных осей объектной системы координат и один - вдоль третьей оси этой системы координат, выходы инерциальных датчиков подключены ко входу локального компьютера по беспроводной технологии передачи информации, в котором инсталлировано программное обеспечение для процедуры определения переменных инерциальной информации на основе первичной информации;
Локальный компьютер - вычислительное устройство, встроенное в блок инерциальной информации или входящее в состав бортового компьютера, в котором хранится информация о структуре блока инерциальных датчиков и в который инсталлировано программное обеспечение, входом в которое являются переменные первичной информации, проекции векторов инерциальной информации на измерительные оси датчиков, а выходом являются переменные проекции этих векторов на оси связанной с объектом системы координат.
Бортовой компьютер - вычислительное устройство, в котором хранится априорная информация о гравитационном поле (Земли), базовом вращении (вращении Земли) и начальных условиях об ориентации, движении и положении объекта, входом которого являются переменные инерциальной информации, а выходом - переменные навигационной информации и в который инсталлировано программное обеспечение для процедуры функционирования бесплатформенной инерциальной навигационной системы, то есть определения переменных навигационной информации на основе переменных инерциальной и априорной информации;
Бесплатформенная инерциальная навигационная система - электро-электронно-механическое устройство, состоящее из блока инерциальной информации, подключенного к бортовому компьютеру, выходом которого являются переменные навигационной информации и функция управления движением объекта, поступающие на вход системы управления движением объекта:
Функционирование бесплатформенной инерциальной навигационной системы -процесс получения навигационной информации об ориентации объекта в системе координат, в которой решается задача навигации и управления им (например, направляющих косинусах от земной системы координат к системе координат подвижного объекта), движении объекта (проекций вектора скорости полюса подвижного объекта в земной системе координат), положении объекта (проекций радиуса-вектора полюса объекта в земной системе координат) и функции управления движением объекта на основе обработки первичной информации с привлечением априорной информации о гравитационном поле Земли, вращении Земли и начальных ориентации, движении и положении объекта относительно Земли;
Идентификация параметров инерциального датчика - процедура определения реальных конструктивных параметров инерциального датчика, основанная на его стендовых испытаниях, физически моделирующих поступательные и угловые движения объекта с обработкой получаемой при этих испытаниях первичной информации с последующим вычислением параметров инерциального датчика; для этой процедуры требуется разработка соответствующего программного обеспечения;
Массогеометрические характеристики инерциального датчика - совокупность геометрических параметров инерциального датчика, четырех вибрирующих точечных масс, массы подвеса, компонент тензора инерции подвеса и координат центра масс подвеса в связанной с датчиком системе координат.
Уровень техники
Известна бесплатформенная инерциальная навигационная система, построенная на трех взаимно ортогональных датчиках угловой скорости и трех взаимно ортогональных акселерометрах, выходы которых подключены к бортовому компьютеру, в котором вычисляются переменные навигационной информации и функция управления движением объекта [2, 3, 4].
Недостатком этого устройства является невозможность его использования для навигационных измерений в составе инерциального навигационного комплекса для высокоскоростного маневренного объекта [1].
Известен способ построения инерциальной навигационной системы [5], заключающийся в установке на объекте бесплатформенной инерциальной навигационной системы, состоящей из блока инерциальной информации, в состав которого входят один датчик углового движения (например, датчик угловой скорости) и один датчик поступательного движения (например, акселерометр), блок инерциальной информации жестко закреплен на оси, приводящейся во вращение двигателем и снабженной тахометром для измерения ее угловой скорости относительно объекта, во время движения объекта измеряют сигналы указанных датчиков в окрестностях координатных осей связанной с объектом системы координат и далее обрабатывают их с привлечением необходимой априорной информации для получения переменных навигационной информации. Известны также и усовершенствования [6, 7, 8] этого способа путем установки датчиков сил на оси вращения и соответствующей обработки измерительной информации. В изобретениях [5, 6, 7, 8] по способам построения инерциальных навигационных систем зафиксирована идея уменьшения количества инерциальных датчиков в системе путем принудительного вращения акселерометра Относительно стабилизированной платформы или принудительного вращения относительно объекта двух датчиков, один из которых - акселерометр, второй - датчик угловой скорости. Если в дополнение к этим способам установить на оси вращения датчики сил, то измеряемая ими информация и ее обработка позволит получить избыточную инерциальную информацию с целью использования ее для повышения точности навигационной информации. Область применения таких систем ограничена объектами с медленно-меняющимися или с программно-меняющимися кинематическими характеристиками, то есть такие системы невозможно использовать для навигационных измерений в составе инерциального навигационного комплекса для высокоскоростного маневренного объекта [1].
Раскрытие изобретения
Задачей заявляемого устройства является обеспечение функциональных и точных навигационных измерений для высокоскоростного маневренного объекта [1].
Решение поставленной задачи основано на следующих идеях: 1) использование нескольких однотипных инерциальных датчиков для построения блока инерциальной информации; 2) использование в качестве основного элемента инерциального датчика кориолисова вибрационного гироскопа камертонного типа [9], признанного в научных кругах [11] самым перспективным на современном уровне развития гироскопических и инерциальных технологий чувствительным элементом бесплатформенных инерциальных навигационных систем для высокоскоростных маневренных объектов по следующим обстоятельствам: а) чувствительный элемент изготовлен из кварца - материала, являющегося эталоном стабильности, поэтому будут стабильными и параметры гироскопа; б) необходимое для функционирования колебание оболочки в пределах упругих деформаций не связано ни с износом, ни с деградацией материала, поэтому практически не ограничивает долговечности прибора; в) диапазон измеряемых угловых скоростей и линейных ускорений практически неограничен; г) прибор миниатюрен, стоек к механическим и температурным воздействиям, недорогой в серийном производстве; 3) установка в опорный узел подвеса кориолисова вибрационного гироскопа камертонного типа датчиков сил [12, 13] таким образом, чтобы на основе их сигналов можно было определить реакции опоры подвеса; 4) идентификация параметров каждого инерциального датчика в блоке инерциальной информации и использование величин этих параметров при вычислении переменных инерциальной информации в течение всего интервала времени навигационных измерений.
Поставленная задача решается тем, что бесплатформенная инерциальная навигационная система состоит из пяти инерциальных датчиков, каждый из которых построен на кориолисовом вибрационном гироскопе камертонного типа [9], каждый из которых, в свою очередь, представляет собой механическую систему, состоящую из четырех точечных масс, перемещающихся в направляющих, установленных во взаимно перпендикулярных направлениях в одной плоскости, перпендикулярно которой установлена ось подвеса, закрепленная в опорный узел, снабженный четырьмя взаимно перпендикулярными стержнями, жестко закрепленными первыми концами на оси подвеса и перпендикулярными этой оси, на втором конце каждого стержня установлено по пять датчиков сил, один из которых установлен вдоль стержня, остальные четыре - взаимно перпендикулярно и перпендикулярно стержню, а на каждую точечную массу действует сила от установленного около направляющей этой точечной массы вибратора, приводящего эту точечную массу в возвратно-поступательное движение по гармоническому закону во времени с заданными амплитудой и частотой. На основе измеряемых сигналов датчиков сил далее последовательно: 1) во встроенном компьютере вычисляют шесть реакций опоры подвеса для каждого инерциального датчика, 2) в локальном компьютере вычисляют тридцать переменных инерциальной информации, 3) в бортовом компьютере вычисляют пятнадцать переменных навигационной информации с привлечением априорной информации об угловой скорости Земли, ее гравитационном поле и начальных условиях о движении объекта, а затем вычисляют функцию управления движением объекта с привлечение априорной информации о программных законах движения объекта во времени. Подача сигналов датчиков сил в локальный компьютер осуществляется по беспроводной технологии передачи информации [14].
Осуществление изобретения
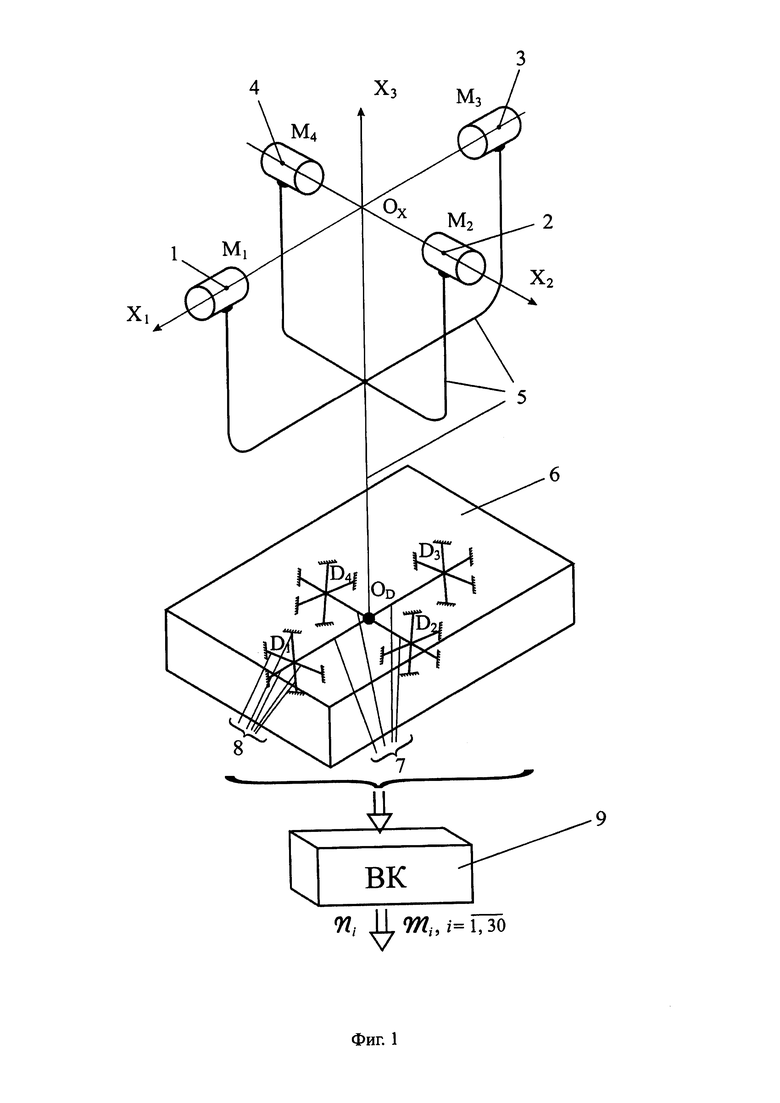
На фиг. 1 показана схема инерциального датчика, построенного на основе кориолисова вибрационного гироскопа камертонного типа, являющегося одним из нескольких (не менее пяти) инерциальных датчиков, входящих в состав бесплатформенной инерциальной навигационной системы. С инерциальным датчиком связана система координат OxX1X2X3, ось Х3 которой направлена перпендикулярно плоскости, в которой расположены четыре точечных массы 1, 2, 3, 4, из которых массы 1, 3 расположены на оси Х1, а массы 2, 4 расположены на оси Х2. Каждая из масс совершает устойчивые гармонические колебания в направлении соответствующей координатной оси, возбуждаемые вибратором (на фиг. 1 не показанном), установленном около массы на конце соответствующей вилки подвеса 5. Указанные возбуждаемые гармонические колебания каждой из точечных масс динамически синтезированы по критерию устойчивости с помощью демпфирующих и упругих сил, реализуемых вибратором таким образом, что каждая из точечных масс колеблется с заданными постоянными амплитудой и частотой, при этом, согласно принципу действия кориолисова вибрационного гироскопа, массы 1, 3 и массы 2, 4 колеблются в противофазах по отношению друг к другу. Вилки подвеса 5 составляют единое целое с осью подвеса, которая жестко закреплена в с объектом корпусе (показанном на фиг. 1 штриховкой) с помощью опорного узла 6. На оси подвеса и ей перпендикулярно и взаимно перпендикулярно, то есть параллельно координатным осям X1, Х2 жестко закреплены своими первыми концами четыре стержня 7, на втором конце каждого стержня смонтированы по пять датчиков сил 8, четыре из которых перпендикулярны стержню, взаимно перпендикулярны и направлены параллельно соответствующим координатным осям, а пяты датчик силы установлен вдоль стержня. Датчик силы представляет собой работающий на сжатие пьезоэлектрический элемент [11], сигнал которого пропорционален действующей на него силы сжатия. Следует отметить, что каждый датчик силы предварительно поджимают и выставляют на нуль его сигал в этом предварительно поджатом состоянии из того условия, что при уменьшении силы сжатия у него появляется сигнал, соответствующий силе противоположного направления по отношению к силе, обеспечивающей его предварительное поджатие. Указанное предварительное поджатие каждого датчика силы рассчитано таким образом, что эти датчики способны измерять весь диапазон сил, обусловленных движением объекта, для которого предназначена бесплатформенная инерциальная навигационная система. Каждый датчик силы подключен к встроенному компьютеру 9, в котором на основе сигналов двадцати датчиков сил (первичной информации) вычисляют реакции опоры подвеса: три проекции Ni вектора силы и три проекции Mi вектора момента относительно точки Ох на оси Xi, i=1, 2, 3.
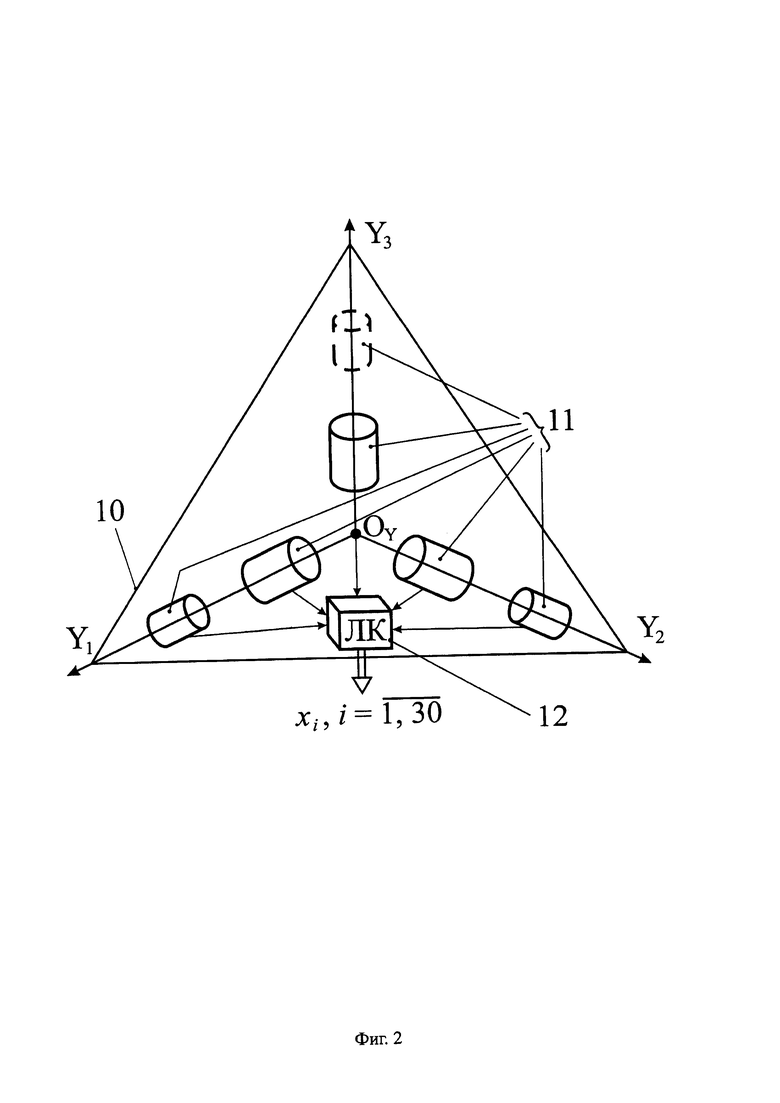
На фиг. 2 изображена схема блока инерциальной информации 10, построенного на пяти инерциальных датчиках 11 указанного выше типа, подключенных к локальному компьютеру 12. Показанный пунктиром датчик является избыточным и далее его информация не используется при выполнении математического описания блока инерциальной информации. С корпусом блока инерциальной информации связана объектная система координат OyY1Y2Y3, по осям Y1, Y2 которой установлены по два инерциальных датчика, по оси Y3 - один инерциальный датчик (пунктиром показан датчик, который может быть избыточным). Выходная информация встроенных компьютеров каждого инерциального датчика подана на вход локального компьютера 12, выходная информация которого - это тридцать переменных xi, i=1, … 30 инерциальной информации и в котором осуществляются вычисления этих переменных на основе вычисленных во встроенных компьютерах пяти инерциальных датчиков реакций опор их подвесов: это величины: Nqk, Mqk, q=1, … 5; k=1, 2, 3.
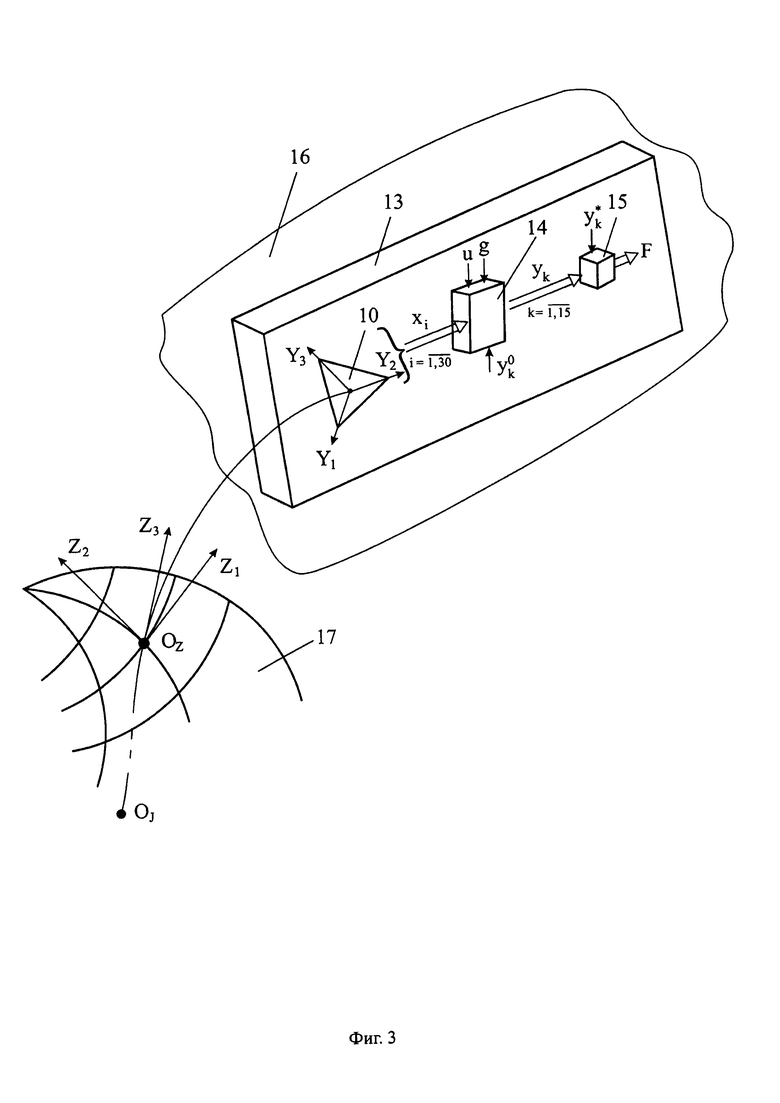
На фиг. 3. изображена бесплатформенная инерциальная навигационная система 13, состоящая из блока инерциальной информации 10, бортового компьютера 14 и блока 15 вычисления функции управления движением объекта 16, движущегося относительно Земли 17. Выходной информацией блока инерциальной информации 10 являются переменные xi, i=1, … 30 инерциальной информации, поступающие из локального компьютера 12 на вход бортового компьютера 14, в котором хранится априорная информация о вращении Земли, ее гравитационном поле и начальных условиях движения объекта. Выходная информация бортового компьютера 14 - это вычисляемые в каждый текущий момент времени движения объекта пятнадцать переменных навигационной информации: девять направляющих косинусов Cij, Ij=1, 2, 3 от земной географической к к объектной системе координат, три проекции Vi, i=1, 2, 3 вектора скорости полюса объекта и три проекции Ri, i=1, 2, 3 радиуса-вектора полюса объекта в земной географической системе координат. Указанные переменные навигационной информации поступают на вход блока 15 вычисления функции F управления движением объекта, которая далее подается в систему управления его движением относительно Земли.
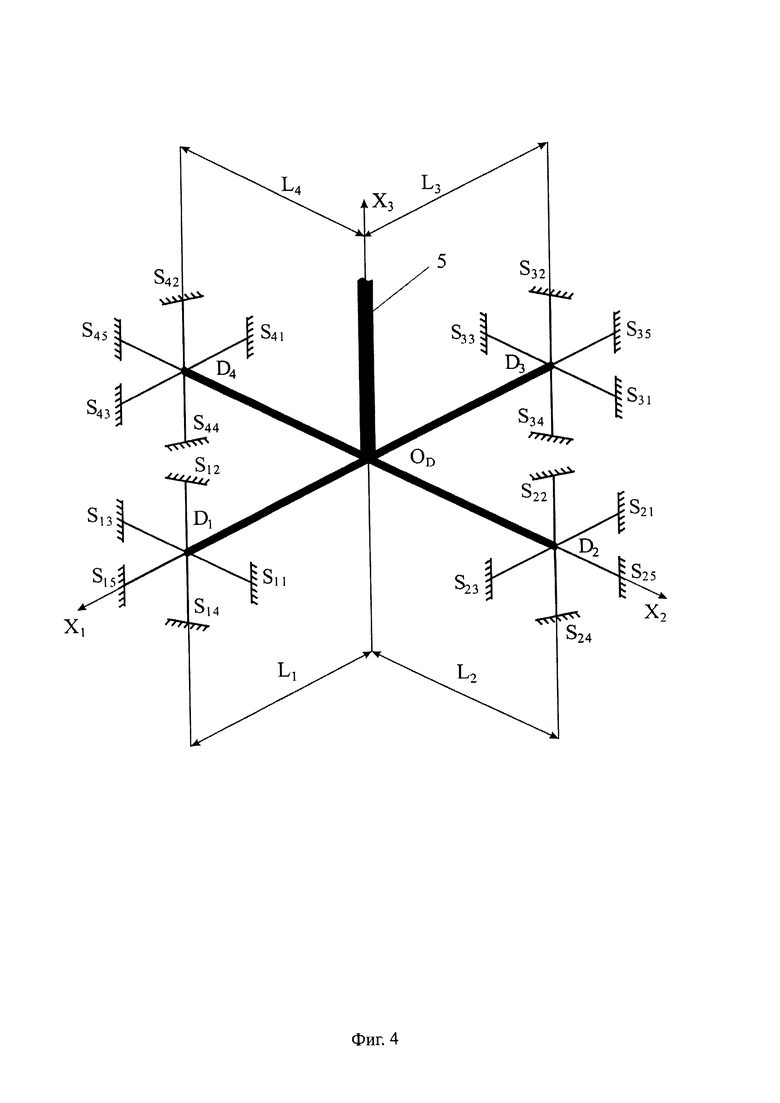
На фиг. 4 представлена схема опорного узла 6 с наименованием каждого из двадцати датчиков сил, математическое описание обработки информации каждого из которых приведено далее в тексте описания.
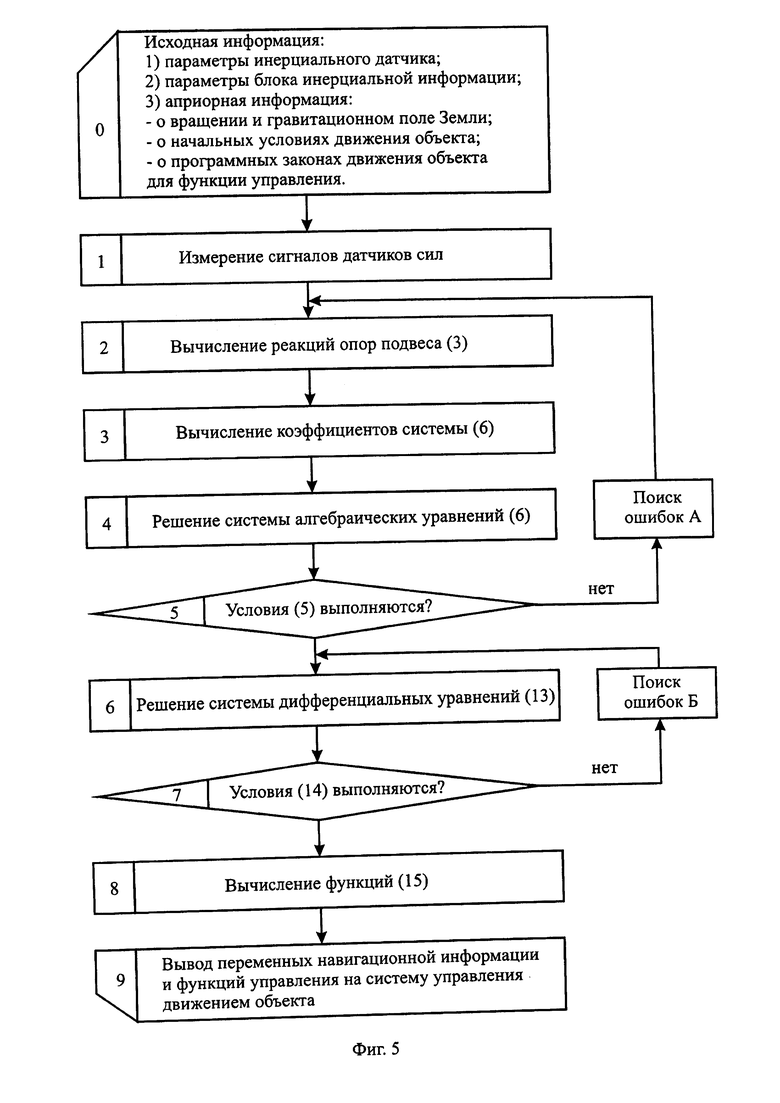
На фиг. 5 изображена блок-схема алгоритма функционирования бесплатформенной инерциальной навигационной системы, краткое математическое описание которого приведено далее.
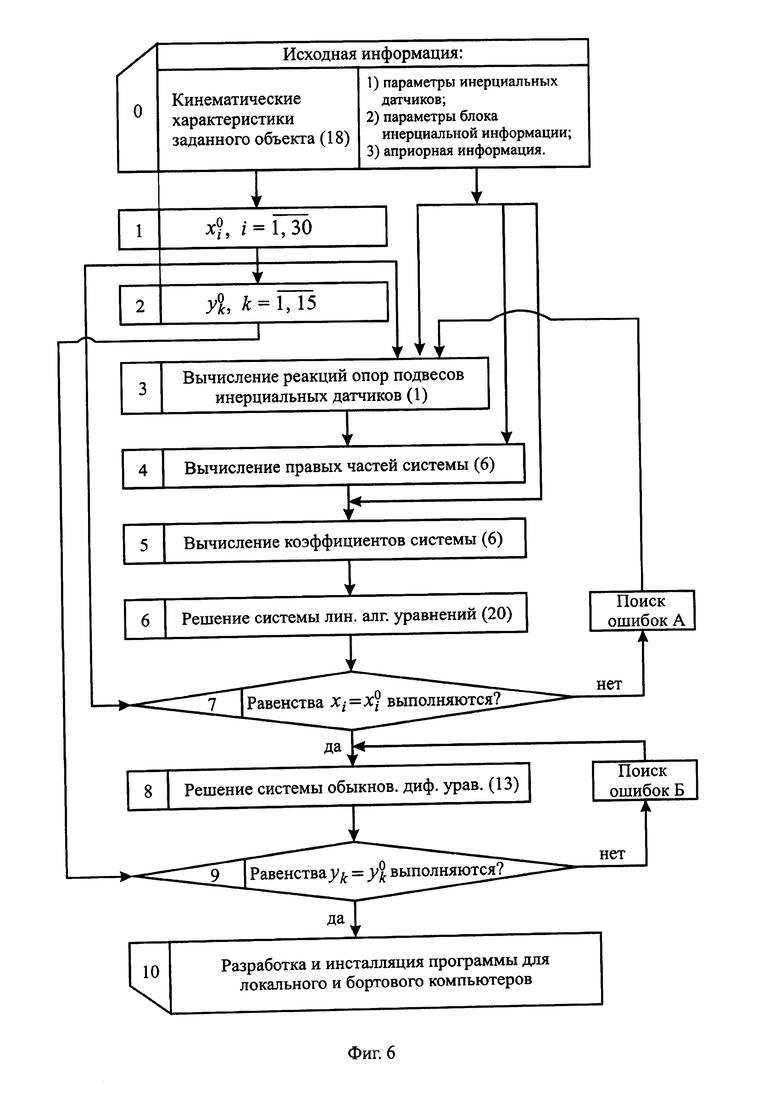
На фиг. 6 изображена блок-схема имитационной модели функционирования бесплатформенной инерциальной навигационной системы, краткое математическое описание которого приведено далее.
Устройство работает следующим образом
Для пояснения работы заявляемого изобретения необходимо привести краткое пояснение математических описаний функционирования инерциального датчика, бока инерциальной информации и бесплатформенной инерциальной навигационной системы.
Рассмотрим инерциальный датчик (фиг. 1) как механическую систему, состоящую из четырех точечных масс 1, 2, 3, 4, установленных в направляющие подвеса 5 вдоль координатных осей X1, X2 и движущихся по этим направляющим под действием сил, возбуждаемых вибраторами, и подвеса 5, закрепленного в корпусе (показанного на фиг. 1 штриховкой), связанного с объектом, движущимся в пространстве произвольным образом. Применяя к указанной механической системе теорему об изменении главного вектора количеств движения и теорему об изменении главного момента количеств движения относительно точки Ох, составляем шесть скалярных уравнений:

где Ωj, εj, Wj, Vj - проекции на оси объектной системы координат соответственно векторов абсолютной угловой скорости, абсолютного углового ускорения, кажущегося ускорения полюса объекта, скорости полюса объекта;  - коэффициенты, зависящие от массогеометрических характеристик инерциального датчика и законов движения во времени точечных масс. Авторами получены формулы для этих коэффициентов от указанных параметров инерциального датчика и законов движения точечных масс и могут быть представлены эксперту по его требованию. Правые части уравнений (1) имеют выражения:
- коэффициенты, зависящие от массогеометрических характеристик инерциального датчика и законов движения во времени точечных масс. Авторами получены формулы для этих коэффициентов от указанных параметров инерциального датчика и законов движения точечных масс и могут быть представлены эксперту по его требованию. Правые части уравнений (1) имеют выражения:

где Fi - силы, действующие на точечные массы для динамического синтеза с целью создания устойчивых вынужденных гармонических колебаний этих масс заданных амплитуд и частот; Ni - силы реакций опоры подвеса; Mi - моменты сил реакций опоры подвеса, i=1, 2, 3; h - расстояние от плоскости расположения точечных масс до точки OD опорного узла (фиг. 1). Обозначая символом rij величину (в размерности силы, то есть с учетом соответствующих коэффициентов пропорциональности) сигнала датчика силы Sij (фиг. 4), записываем зависимости указанных реакций опоры подвеса от сигналов датчиков сил:
где Li - расстояние от точки OD до точки Di установки датчиков сил, i=1, 2, 3, 4 (фиг. 4). Параметры инерциального датчика и его установки на объекте, от которых зависят коэффициенты уравнений (1):
h - расстояние от плоскости расположения точечных масс до точки OD опоры подвеса (фиг. 1);
mi - величина точечной массы номер i, i=1, 2, 3, 4;
bi - расстояние от оси Х3 до начального положения точечной массы номер i;
m5 - масса подвеса;
 -компоненты тензора инерции подвеса в системе координат OxX1X2X3;
-компоненты тензора инерции подвеса в системе координат OxX1X2X3;
Pj - проекции радиуса-вектора центра масс подвеса в системе координат OxX1X2X3;
αi - амплитуда вынужденных колебаний точечной массы номер i;
ωi - частота вынужденных колебаний точечной массы номер i;
ψi - фаза вынужденных колебаний точечной массы номер i;
χi=αisin(ωit+ψi) - закон гармонических колебаний точечной массы номер i относительно начального положения в направляющей, определяемого параметром bi;
L0j - проекции радиуса-вектора начала Ох системы координат OxX1X2X3 на оси объектной системы координат, j=1, 2, 3;
βi - углы установки инерциального датчика относительно объектной системы координат, i=1, 2, 3.
Следует отметить, что все вышеперечисленные параметры инерциального датчика должны быть настолько точно идентифицированы, насколько это позволяют существующие современные средства стендовых испытаний, соответствующих измерений и обработки информации, так как от точности идентификации параметров инерциальных датчиков будет зависеть точность вычисляемых величин реакций опор подвеса во встроенном компьютере, переменных инерциальной информации в локальном компьютере и переменных навигационной информации в бортовом компьютере. Заметим также, что разделение общего вычислительного устройства бесплатформенной инерциальной навигационной системы на встроенный, локальный и бортовой компьютер является условным с целью удобства пояснения сути вычислительных процедур, реализуемых соответственно в инерциальном датчике, блоке инерциальной информации и собственно в бесплатформенной инерциальной навигационной системе.
И еще одно существенное замечание. Уравнения (1) для рассматриваемого инерциального датчика получены при произвольных величинах его параметров и при произвольной его установке на произвольно движущийся в пространстве объект. Если принять величины параметров инерциального датчика не произвольными, а удовлетворяющими некоторым ограничениям, достигаемым специальными конструктивными разработками, а также установить его не произвольным, а частным образом на объект, который совершает не произвольное, а некоторое частное движение, то из уравнений (1) можно «удалить» некоторые слагаемые и иметь не тридцать переменных инерциальной информации, как это имеет место в общем случае, а меньше. В этом случае и построение блока инерциальной информации возможно на меньшем количестве инерциальных датчиков. Другими словами, можно специальными конструктивными разработками, реализованными в соответствии с критериями параметрического синтеза, обнулить коэффициенты при некоторых слагаемых в уравнениях (1) и превратить рассматриваемый инерциальный датчик общего вида в инерциальный датчик специального вида, например, в датчик угловой скорости, датчик углового ускорения, датчик кажущегося ускорения. Но следует иметь в виду, что указанные конструктивные разработки необходимо реализовывать с предельно высокой точностью, которая возможна при современной технологической культуре производства. Поэтому возникает альтернатива: точно идентифицировать реальные параметры инерциального датчика и пользоваться общими уравнениями (1) для получения в конечном итоге переменных навигационной информации или превратить инерциальный датчик общего вида в инерциальный датчик специального вида путем специальных конструктивных разработок с использованием точной технологии реализации этих разработок. В заявляемом изобретении использован первый вариант, хотя второй вариант после выполнения необходимых теоретических исследований также имеет право на существование.
Согласно схеме блока инерциальной информации (фиг. 2), в его состав входят пять инерциальных датчиков, математическое описание каждого из которых представлено шестью уравнениями (1), в каждое из которых в общем случае при произвольных величинах параметров инерциальных датчиков входит по тридцать переменных инерциальной информации вида:

Заметим, что переменные Ωi, Wi i=1, 2, 3 инерциальной информации из перечисленных в (4) являются основными, а остальные - избыточными, которые следует использовать для проверки правильности вычислений основных, например, путем проверки выполнения тождеств:

то есть повышения надежности определения указанных переменных, а значит и повышение надежности определения переменных навигационной информации и функции управления движением объекта. Следует отметить, что в общем случае инерциальные датчики, входящие в состав блока инерциальной информации, должны иметь неодинаковые параметры, перечисленные выше, для того, чтобы решения системы линейных алгебраических уравнений относительно переменных инерциальной информации:

существовали и были единственными, где aij - коэффициенты, зависящие от времени в силу наличия заданных законов движения во времени точечных масс и от конструктивных параметров пяти инерциальных датчиков, Bi - правые части, зависящие от величин реакций (3), определенных на основе измеряемых сигналов датчиков сил пяти инерциальных датчиков. Решая систему линейных алгебраических уравнений (6) в локальном компьютере блока инерциальной информации (фиг. 2), получаем величины переменных инерциальной информации (4), из которых переменные Ωi, Wi, i=1, 2, 3 являются основными и необходимыми для реализации алгоритма функционирования бесплатформенной инерциальной навигационной системы, а остальные переменные инерциальной информации из перечня (4) являются избыточными и должны быть использованы для проверки правильности определения основных переменных инерциальной информации, то есть должны быть использованы для повышения надежности получаемой инерциальной информации, а следовательно, и повышения надежности определения переменных навигационной информации и функции управления движением объекта.
Согласно схеме бесплатформенной инерциальной навигационной системе (фиг. 3) в бортовом компьютере должен быть реализован алгоритм ее функционирования на основе вычисленных переменных инерциальной информации Ωi, Wi, i=1, 2, 3, математическое описание для которого представляет собой систему пятнадцати обыкновенных дифференциальных уравнений:



и систему шести алгебраических уравнений, выражающих условия ортогональности и масштаба для направляющих косинусов от земной географической к объектной системе координат:

где введены обозначения: Sijk - символ Леви-Чивита, Dij - символ Кронеккера, Ui, gi - проекции соответственно векторов угловой скорости Земли и гравитационного ускорения полюса объекта в земной географической системе координат; Ωi, Wi - проекции соответственно векторов абсолютной угловой скорости объекта и кажущегося ускорения полюса объекта в объектной системе координат, являющиеся основными переменными инерциальной информации; Cij - направляющие косинусы от земной географической системы координат к объектной системе координат; Vi, Ri - проекции соответственно векторов скорости полюса объекта и радиуса-вектора полюса объекта (то есть координат объекта) в земной географической системе координат; C0ij, V0i, R0i - значения соответственно переменных Cij, Vi, Ri в начальный момент времени навигации объекта, то есть начальные условия движения объекта. Функция управления движением объекта может быть представлена в виде:

где C*ij, V*i, R*i - программные функции времени переменных навигационной информации, соответствующие переменным Cij, Vi, Ri, вычисленным в бортовом компьютере бесплатформенной инерциальной навигационной системы;  размерные весовые коэффициенты, определяемые зависимостями:
размерные весовые коэффициенты, определяемые зависимостями:

где CBij, VBi, RBi - наибольшие значения переменных Cij, Vi, Ri на интервале времени [t0; T] навигации объекта;  - безразмерные весовые коэффициенты, которыми выделяется значимость того или иного слагаемого в формуле (9), удовлетворяющие условию:
- безразмерные весовые коэффициенты, которыми выделяется значимость того или иного слагаемого в формуле (9), удовлетворяющие условию:

Заметим, что функция (9) с учетом введенных весовых коэффициентов (10), (11) представляет собой относительную величину рассогласования между программными и определяемыми бесплатформенной инерциальной навигационной системой переменными навигационной информации в каждый текущий момент времени из интервала [t0; T]. Далее, аналогично тому, как это было сделано для тридцати переменных инерциальной информации, целесообразно ввести единые обозначения для пятнадцати переменных навигационной информации:

тогда систему уравнений (7) можно записать в виде:





уравнения (8) можно записать в виде:

функцию управления (9) можно записать в виде:

где введены обозначения для размерных весовых коэффициентов:

а также введены обозначения: y*k - программные функции времени переменных навигационной информации, соответствующие переменным yk; yBk - наибольшие значения переменных yk на интервале времени [t0; T] навигации объекта, γ0k - безразмерные весовые коэффициенты, удовлетворяющие условию (11), которое а новых обозначениях переменных навигационной информации принимает вид:

На основе выполненного математического описания составлен алгоритм функционирования бесплатформенной инерциальной навигационной системы, который поясняет работу заявленного устройства. Блок-схема этого алгоритма представлена на фиг. 5. В блоке 0 перечислена исходная информация, хранимая в бортовом компьютере, и предназначенная для осуществления вычислений в блоках 1, 2, 3 алгоритма. После измерения сигналов датчиков сил в блок 1 вычисляются реакции опор подвесов пяти инерциальных датчиков по формулам (3) в блоке 2, которые используются для вычисления в блоке 3 коэффициентов aij на основе коэффициентов  зависящих от массогеометрических характеристик пяти инерциальных датчиков и величин Bi правых частей системы (6), зависящих от вычисленных ранее реакций опор подвесов пяти инерциальных датчиков. Далее в блоке 4 осуществляется решение системы линейных алгебраических уравнений тридцатого порядка относительно переменных инерциальной информации xi, в блоке 5 проверяются условия (5) - зависимости между переменными инерциальной информации, при невыполнении которых осуществляется поиск ошибок А с возвратом на блок 2. Далее в блоке 6 решается система (13) обыкновенных дифференциальных уравнений пятнадцатого порядка относительно переменных навигационной информации yi, после чего в блоке 7 проверяются условия (14) ортогональности и масштаба для направляющих косинусов, при невыполнении которых осуществляется поиск ошибок Б с возвратом на блок 6. Далее в блоке 8 вычисляется функция (15) управления движением объекта и в блоке 9 осуществляется вывод переменных навигационной информации и функции (5) и ввод их в систему управления движением объекта. На основе этого алгоритма с использованием конкретных формул, которыми должен быть снабжен блок 3 (эти формулы имеются, но с целью сокращения текста описания не приведены), должна быть разработана программа для бортового компьютера и после изготовления опытного образца заявляемого устройства проведены натурные испытания этой программы для ее отладки и устранения ошибок типа А и Б.
зависящих от массогеометрических характеристик пяти инерциальных датчиков и величин Bi правых частей системы (6), зависящих от вычисленных ранее реакций опор подвесов пяти инерциальных датчиков. Далее в блоке 4 осуществляется решение системы линейных алгебраических уравнений тридцатого порядка относительно переменных инерциальной информации xi, в блоке 5 проверяются условия (5) - зависимости между переменными инерциальной информации, при невыполнении которых осуществляется поиск ошибок А с возвратом на блок 2. Далее в блоке 6 решается система (13) обыкновенных дифференциальных уравнений пятнадцатого порядка относительно переменных навигационной информации yi, после чего в блоке 7 проверяются условия (14) ортогональности и масштаба для направляющих косинусов, при невыполнении которых осуществляется поиск ошибок Б с возвратом на блок 6. Далее в блоке 8 вычисляется функция (15) управления движением объекта и в блоке 9 осуществляется вывод переменных навигационной информации и функции (5) и ввод их в систему управления движением объекта. На основе этого алгоритма с использованием конкретных формул, которыми должен быть снабжен блок 3 (эти формулы имеются, но с целью сокращения текста описания не приведены), должна быть разработана программа для бортового компьютера и после изготовления опытного образца заявляемого устройства проведены натурные испытания этой программы для ее отладки и устранения ошибок типа А и Б.
Правильность приведенного выше алгоритма функционирования бесплатформенной инерциальной навигационной системы зависит от достоверности информации сигналов датчиков сил и, соответственно, от правильного вычисления реакций подвесов пяти инерциальных датчиков, входящих в состав блока инерциальной информации. Проверка указанных достоверности и правильности должна быть реализована экспериментально после изготовления конструкций опорных узлов (фиг. 4) пяти инерциальных датчиков. После проведения этих процедур и получения требуемых результатов остается вопрос о проверке достоверности алгоритма вычисления тридцати переменных xi, i=1, …, 30 инерциальной информации и пятнадцати переменных yk, k=1, …, 15 навигационной информации. Этот вопрос может быть решен теоретически на основе построенной имитационной модели функционирования бесплатформенной инерциальной навигационной системы, о которой далее идет речь. Для построения указанной имитационной модели необходимо задать информацию о кинематических характеристиках объекта, для навигации которого предполагается использовать бесплатформенную инерциальную навигационную систему. Эти кинематические характеристики можно задать в виде функций времени:

где  - проекции соответственно радиуса-вектора полюса объекта в земной географической системе координат, их первые и вторые производные по времени;
- проекции соответственно радиуса-вектора полюса объекта в земной географической системе координат, их первые и вторые производные по времени; 
 - углы поворотов объекта относительно земной географической системы координат, их первые и вторые производные по времени на интервале [t0; T]. На основе этой информации путем выкладок, проделанных авторами методами кинематики произвольно движущегося в пространстве объекта, определяются переменные:
- углы поворотов объекта относительно земной географической системы координат, их первые и вторые производные по времени на интервале [t0; T]. На основе этой информации путем выкладок, проделанных авторами методами кинематики произвольно движущегося в пространстве объекта, определяются переменные:

являющиеся имитациями соответствующих переменных xi инерциальной информации, и далее определяются переменные:

являющиеся имитациями соответствующих переменных yi навигационной информации. Подставляя переменные (19) в формулы (1) для пяти инерциальных датчиков, получаем имитации реакций опор подвесов этих инерциальных датчиков и затем получаем имитации B0i правых частей системы (6), вместо которой получаем соответствующую имитационную систему линейных алгебраических уравнений:

Решая эту систему относительно xi и сравнивая полученные решения с соответствующими переменными x0i, делаем вывод о правильности или неправильности алгоритма вычисления переменных инерциальной информации. В случае правильности на основе этого алгоритма следует разработать программу и инсталлировать эту программу в локальный компьютер. Далее, используя имитации x0i переменных инерциальной информации, на основе алгоритма функционирования бесплатформенной инерциальной навигационной системы путем решения системы обыкновенных дифференциальных уравнений (13) относительно yi и сравнивая полученные решения с соответствующими переменными y0i, делаем вывод о правильности или неправильности алгоритма вычисления переменных навигационной информации. В случае правильности на основе этого алгоритма следует разработать программу и инсталлировать эту программу в бортовой компьютер. Блок-схема этого алгоритма представлена на фиг. 6. В блоке 0 перечислена исходная информация, в состав которой входит указанная выше информация о кинематических характеристиках объекта (18), на основе которой вычисляются переменные (19), (20) соответственно в блоках 1, 2. В блоке 3 вычисляются реакции опор подвесов пяти инерциальных датчиков с использованием формул (1), читая их справа налево, и далее в блоках 4, 5 вычисляются правые части системы (6) и коэффициенты этой системы, после чего в блоке 6 решается соответствующая имитационная система (21). Полученные решения в блоке 7 сравниваются с соответствующими переменными (19) и в случае их несовпадения осуществляется поиск ошибок А и возврат к блоку 3. Далее основные переменные инерциальной информации из перечня (19) подставляются в систему (13) и в блоке 8 решается эта система и полученные решения в блоке 9 сравниваются с переменными (20) и в случае их несовпадения осуществляется поиск ошибок Б и возврат к блоку 8. На основе описанного алгоритма следует разработать программы для локального и бортового компьютеров, которые при их отладке и устранения ошибок А и Б должны быть инсталлированы в локальный и бортовой компьютеры и в дальнейшем проверены при натурных испытаниях заявляемого устройства.
Итак, для доказательства принципиальной работоспособности заявляемого устройства составлен и пояснен математическими описаниями алгоритм функционирования бесплатформенной инерциальной навигационной системы (фиг. 5), представляющий собой последовательность операций ввода исходной информации, измерения и вычисления, выходом которого являются переменные навигационной информации и функция управления движением объекта. Для доказательства принципиальной реализуемости работоспособности заявляемого устройства при навигации объекта с заданными кинематическими характеристиками составлен и пояснен математическими описаниями алгоритм имитационной модели функционирования бесплатформенной инерциальной навигационной системы (фиг. 6) с целью контроля правильности вычислений переменных инерциальной информации и переменных навигационной информации при разработке программ для локального и бортового компьютеров.
Источники информации, на которые есть ссылки в описании
1. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта / Решение о выдаче патента на изобретение от 29.05.2017 по заявке №2016119832/28(031267) от 23.05.2016 - МПК 8 G01C 23/00; авторы: Хмелевский А.С., Щипицын А.Г., Лысов А.Н., Коваленко В.В.
2. Ткачев Л.И. Системы инерциальной ориентировки: Учебное пособие. - М.: МЭИ, 1973.
3. Щипицын А.Г. Бесплатформенные инерциальные навигационные системы: Учебное пособие. - Челябинск, ЧГТУ, 1993.
4. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009.
5. Способ построения инерциальной навигационной системы. А.с. №155519 / Челяб. политех, ин-т, автор Щипицын А.Г. - Заявлено 20.04.79 №2276932 МКИ3 G01C19/00. Зарегист.5.02.81.
6. Способ построения инерциальной навигационной системы. А.с. №183269 / Челяб. политех, ин-т, авторы: Щипицын А.Г., Хмелевский А.С. - Заявлено 16.03.82 №3042080 МКИ3 G01C 19/00. Зарегист.7.01.83.
7. Способ построения инерциальной навигационной системы. А.с. №201020 / Челяб. политех, ин-т, авторы: Щипицын А.Г., Хмелевский А.С, Губницкий А.Ф. - Заявлено 4.05.83 №3065109 МКИ3 G01C 19/00. Зарегист. 27.03.84.
8. Способ построения инерциальной навигационной системы. А.с. №241291 / Челяб. политех, ин-т, авторы: Щипицын А.Г., Хмелевский А.С., Губницкий А.Ф., Слепова С.В. - Заявлено 9.10.85 №3125843 МКИ3 G01C 19/00. Зарегист. 1.08.86.
9. Брозгуль Л.И., Смирнов Е.Л. Вибрационные гироскопы. - М.: Машиностроение, 1970.
10. Осесиметричный кориолисовый вибрационный гироскоп. Патент на изобретение №2476824 (RU) от 24.05.2012 / ООО «Инналабс». Автор Яценко Ю.А.
11. Проблемы твердотельных вибрационных (волновых) гироскопов: Материалы секции Совета РАН от 29 июня 2016 г. - ГНЦ РФ АО «Концерн ЦНИИ «Электроприбор», 2016.
12. Малов В.В. Пьезоэлектрические датчики. - 2-е изд. - М.: Энергоатомиздат, 1989.
13. Гроховский С.С., Лущиков Р.И., Прохоров Н.И. Интеллектуальный датчик силы. / Патент РФ 2165601 от 20.04.2001. [Электронный ресурс] - Режим доступа: http://www.freepatent.ru/patents/2165601
14. Григорьев В.А., Лагутенко О.И., Распаев Ю.А.. Системы и сети радиодоступа. М.,: Эко Трендз, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесплатформенная инерциальная навигационная система подвижного носителя | 2018 |
|
RU2682060C1 |
| Бесплатформенная инерциальная навигационная система подвижного объекта | 2017 |
|
RU2676941C1 |
| Инерциальный навигационный комплекс для высокоскоростного маневренного объекта | 2016 |
|
RU2657293C1 |
| Способ непрерывного съёма навигационной информации с кориолисова вибрационного гироскопа | 2016 |
|
RU2662456C2 |
| Способ компенсации погрешности от углового ускорения основания для кориолисова вибрационного гироскопа с непрерывным съёмом навигационной информации | 2016 |
|
RU2659097C2 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2257547C1 |
| Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе | 2022 |
|
RU2794283C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
Изобретение относится к области приборостроения и может быть использовано при создании бесплатформенных инерциальных навигационных систем для высокоскоростного маневренного объекта. Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта, содержащая датчики угловой скорости и датчики кажущегося ускорения, подключенные к бортовому компьютеру, в котором хранится априорная информация о вращении Земли, ее гравитационном поле и начальных условиях о движении объекта и в каждый текущий момент времени последовательно вычисляются шесть переменных инерциальной информации, пятнадцать переменных навигационной информации и функция управления движением объекта. При этом в качестве инерциальных датчиков использованы пять кориолисовых вибрационных гироскопов камертонного типа с идентифицированными массогеометрическими характеристиками и заданными гармоническими законами движения во времени четырех точечных масс, подвес каждого из которых установлен в опорный узел посредством двадцати работающих на сжатие безынерционных датчиков сил, подключенных к бортовому компьютеру, в котором последовательно вычисляются реакции опор подвесов инерциальных датчиков, тридцать переменных инерциальной информации с использованием избыточности для контроля правильности вычислений и повышения надежности, пятнадцать переменных навигационной информация и функция управления движением объекта. Технический результат – обеспечение получения точных навигационных измерений для высокоскоростного маневренного объекта. 6 ил.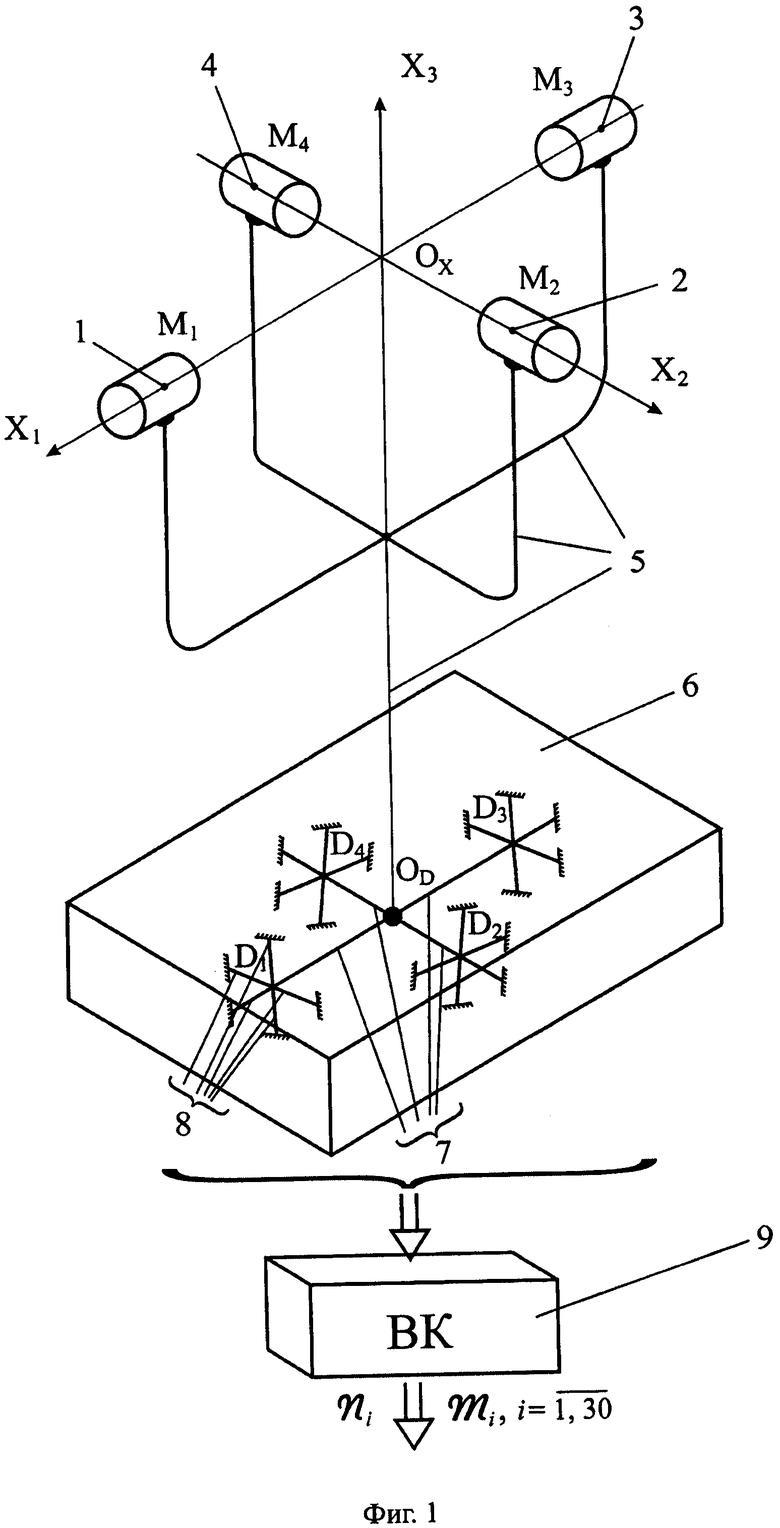
Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта, содержащая датчики угловой скорости и датчики кажущегося ускорения, подключенные к бортовому компьютеру, в котором хранится априорная информация о вращении Земли, ее гравитационном поле и начальных условиях о движении объекта и в каждый текущий момент времени последовательно вычисляются шесть переменных инерциальной информации, пятнадцать переменных навигационной информации и функция управления движением объекта, отличающаяся тем, что в качестве инерциальных датчиков использованы пять кориолисовых вибрационных гироскопов камертонного типа с идентифицированными массогеометрическими характеристиками и заданными гармоническими законами движения во времени четырех точечных масс, подвес каждого из которых установлен в опорный узел посредством двадцати работающих на сжатие безынерционных датчиков сил, подключенных к бортовому компьютеру, в котором последовательно вычисляются реакции опор подвесов инерциальных датчиков, тридцать переменных инерциальной информации с использованием избыточности для контроля правильности вычислений и повышения надежности, пятнадцать переменных навигационной информации и функция управления движением объекта.
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| ОСЕСИММЕТРИЧНЫЙ КОРИОЛИСОВЫЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ВАРИАНТЫ) | 2010 |
|
RU2476824C2 |
| US 6155115 A, 05.12.2000 | |||
| US 6658354 B2, 02.12.2003. | |||

