1
Из(вестны способы автоматического регулирования режи1мов мобильных уборочных машин. Они -натравлены на поддержание постоянства какого-либо технологического параметра, либо на изменение его в соответствии с заранее заданной зависимостью от другого параметра, измеряемого дополнительньш датчиком. Такое управление мобильными уборочньгм машинами косвенно связано .е эффективностью их работы и не позволяет в переменных условиях убор.ки обеспечивать максимальное использование технологических возможностей машин.
В технике из,вестны автоматические управляюодие устройства (автоматические оптимизаторы), обеопечиваюшие поиск экстремальных значений регулируе.мого параметра, когда неизвестна заранее зависи.мость значения регулируемого параметра от управляющего воздействия и значение экстремума является слз гайной вре.мени. Однако до сих пор не было опосо ба, позволяющего строить системы управления мобильными уборочными ма1ш,и.нами с иопользов алием автоматических оптимизаторов.
Цель .изобретения - создание способа построения систем авто матического управления мобильными уборочными ма1шина1м.и с использованием оптимизаторов, датчиков различных .параметров и других элемент-ов автоматики.
обеспечивающих лгаксимальную эффективность выполняемого уборочного процесса при переменных внешних условиях.
Достигается это тем, что измеряют количество готового продукта, получаемого с единицы обра1ботанной площади, и темп обработки этой плош,ади, результаты измерений суммируют, при этом каждое -из слагаемых умножают на соответствующий коэффициент выгоды, сигнал сум:мы подают ,в качестве параметра регулирования на а втоматический оптимизатор, .выходной сигнал которого подают к opraHaiM настройки отдельных рабочих органов и систем автоматического регулирования затруаки уборочной машины.
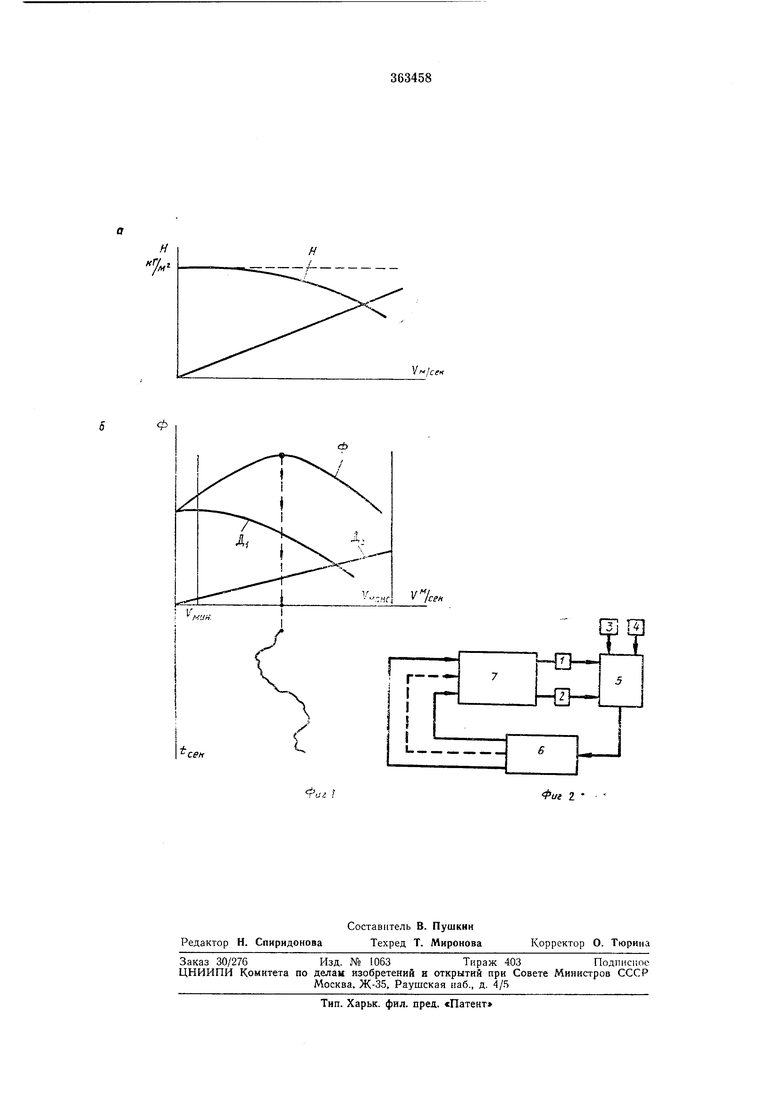
На фиг. j представлены графики, поясняющие предлагаемый способ; на фиг. 2 - блоксхема управления уборочной машиной на примере самоходного зерноуборочного комбайна.
Эффективность работы ко-мбайна характеризуется функцией выгоды Ф, составленной ij виде сум.мы двух видов доходов Дь и . ,-fД2.
Доход Д является величиной, пропорциональной количеству уб1 раемого продукта с единицы , например для зерноуборочного комбайна это намолот зерна
д,((о,
где Я - намолот зерна (кг/м-);
3
k - коэффициент выгоды. Величина коэффициента трспорциональности, называемого коэффициентом выгоды k, устаиавлилается IB аа Вис1 МОСТ1И от хозяйствениой цениости продукта с учетом местных и общегосударственных инте1)есов.
Доход Дг является величиной, пропорциональной темиу Т обработки единицы площади.
Д /г2-Г
Темю обработки может определяться велич.иной скорости движения ;машины К« (м/сек), величиной, обратной времени 4/., затрачивае,мому на обр1аботку единицы площади, т. е.
-- разностью (). где о -
обра-ботки единицы 1площади при движении уборочной машины -с минимальной скоростью.
Величина коэффициента выгоды 2 устанавливается Б зависимости от величины эксплуатационных затрат, необходимых для обеспечения работы м ашины и содержания обслуживающего персонала.
С увеличвние.м темоа обработки площади, т. е. увеличением скорости движения комбайна, потери увеличиваются и доход Д уменьшается. Это уменьшение тем значительнее, чем больше величина скорости движения.
В результате этого функция выгоды Ф имеет эк)стрему.м (макси.мум), который соответствует равенству темпо(в приращения дохода Д2 и (Падения дохода Д при единично.м изменении скорости движения уборочной ма1Ш.ины.
Экстремум функции вьггоды Ф соответствует фунищианированию машины с максим.альной выгодой.
Посколыку условия уборки (урожайность убираемой культуры, ее физико-механические свойства и т. |д.) меняются, то значение экс4
тремума функции ,Быг{)ды Переменно и является случайной функцией вре.мени.
Величина цохода Л эа/виспт также от режима работы технологических органов. Измеияя эти режимы, можно определенным образом влИять на величину Д2.
Цель }1правления - обеспечить функцЮнирование уборочной машины с Максимальной выгодой. Автоматическое управление л-борочной .машиной с целью обеспечения ее фуииционирования (см. фиг. 2) .выполняется следующим образом. С помощью датчиков / и 2 измеряют количество продукта, убираемого с единицы площади, и темп обработки
этой Площади. Полученные сигналы умножают на соответствующие коэффициенты выгоды 3, 4 и подают в сум матор 5, сигнал которого поступает на автоматический оптимизатор 6, воздействующий на узлы настройки
технологических органов, авто.матических регуляторов загрузки .или непосредственно на органы 1правления скоростью Движения агрегата 7.
Предмет изобретения
Способ авто.матического упра.вления уборочной мащиной путем изменения поступательной скорости ее двилсения и режимов работы отдельных рабоч.их аргано.в, отличающийся тем, что, с щелью достижения максимальной эффективности .вьтолнения уборочного процесса в 1перемен;ных условиях, измеряют количество готового продукта, получаемого с единицы обработанной площади, и темп обр-аботки этой , формируют с. учетом относительной выгодности использования иэмеряе.мых Параметров сигнал, пропорциональный алгебраической сумма результатов измерений, .и исйольэуют его в качестве параМепра оптимизации.
И %
| название | год | авторы | номер документа |
|---|---|---|---|
| ВПТБ^.щгаэ1Ж | 1973 |
|
SU395041A1 |
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2643250C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ПРОЦЕССОМ ЗЕРНОУБОРОЧНОЙ МАШИНЫ | 1973 |
|
SU383426A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛЕВОГО ЗНАЧЕНИЯ ПАРАМЕТРА УПРАВЛЕНИЯ РАБОЧЕГО АГРЕГАТА УБОРОЧНОЙ СЕЛЬХОЗМАШИНЫ, УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ АГРЕГАТОМ И УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2006 |
|
RU2403698C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2796063C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ПОТОКА УБРАННОЙ МАССЫ СЕЛЬСКОХОЗЯЙСТВЕННОГО МАТЕРИАЛА | 2004 |
|
RU2339209C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2015 |
|
RU2676959C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ С ЖАТВЕННЫМ АППАРАТОМ И ИЗМЕЛЬЧИТЕЛЬНО-РАСПРЕДЕЛИТЕЛЬНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) | 2004 |
|
RU2355155C2 |
| БУНКЕР ЗЕРНОУБОРОЧНОГО КОМБАЙНА С ПНЕВМАТИЧЕСКОЙ ЗАГРУЗКОЙ ЗЕРНА НАГНЕТАТЕЛЬНОЙ СИСТЕМЫ | 2018 |
|
RU2683540C1 |
Ф
ft)
-сен
Ф,л I
НС I /сен
if
Фиг 2
