1
Изобретение предназначено преимущественно для управления трубопроводной арматурой.
Известны устройства подобного назначения, в которых с помоидью электромагнитного привода управляются мембранные устройства, неносредственно связанные с арм;атурой.
Предлагаемое устройство отличается от известных тем, что в кинематической цепи между командным соленоидом и исполнительным звеном имеется гидравлическая связь в виде расположенных в корпусе и заполненных жидкостью каналов.
Этим достигается новышение точности срабатывания и расширение диапазона возможных перемещений толкателя.
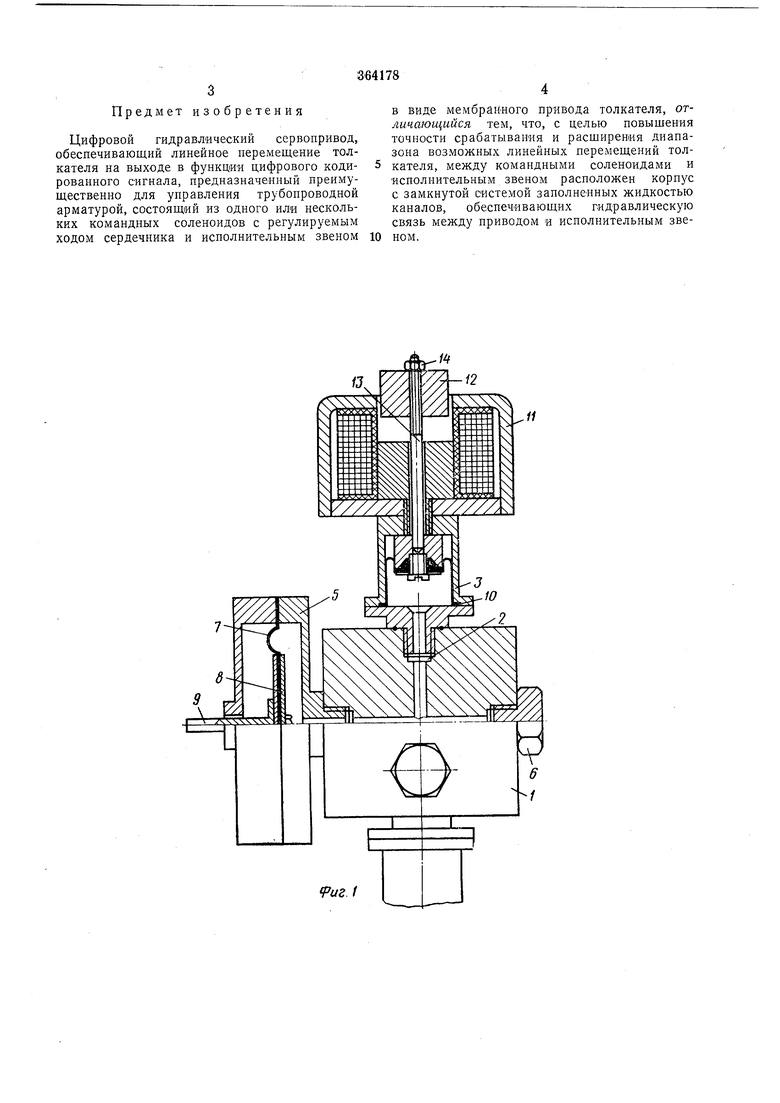
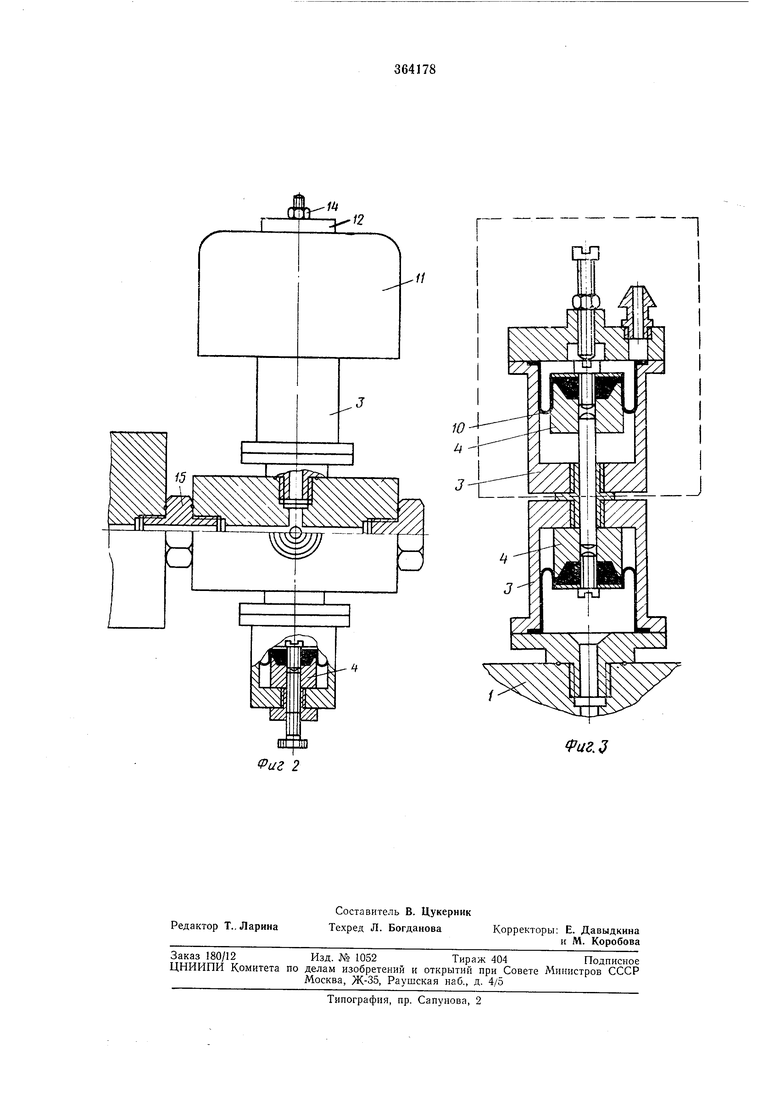
На фиг. 1 представлен описываемый сервопривод, общий вид; на фиг. 2 - блочное расширение конструкции по фиг. 1; на фиг. 3 - блок плунжеров с гидравлическим управлением. Сервопривод состоит из многогранного корпуса / с системой внутренних каналов. В стенках корпуса имеется ряд отверстий 2. В них ввернуты один или несколько цилиндров 3, в которых расположены плунжеры 4. В одно из отверстий 2 ввернута резьбовая часть корпуса 5 мембранного привода толкателя. Неиспользуемые отверстия 2 заглушены пробками 6.
В корпусе 5 размещена ме.мбрана 7, к которой с помощью тарели 8 жестко прикреплен толкатель 9, непосредственно воздействующий на шток или запорный орган арматуры (на чертежах не показана).
Плунжеры 4 уплотнены посредством мембранного диска 10. На каждом плунжерном цилиндре 3 установлен электромагнит /Л подвижный сердечник 12 которого через штангу 13 воздействует на плунжер 4. Путь пере.мещения последнего можно регулировать
вращением сердечника 12 по резьбе на штанге /5. Для установки на нуль и дополнительной регулировки при небольших утечках служит гайка 14. С помощью переходной муфты 15 (см. фиг. 2) можно соединять корпусы в
блоки, формируя многопозиционное устройство. Внутренние каналы в корпусе заполнены жидкостью. При срабатывании электромагнита // плунжер 4 перемещается на величину хода сердечника 12. Комбинацией различных ходов плунжеров при определенной последовательности их срабатывания можно реализовать на выходе (толкатель 9} требуемое перемещение.
Предмет изобретения
Цифровой гидравлический сервопривод, обеспечивающий линейное перемещение толкателя на выходе в функции цифрового кодированного сигнала, предназначенный преимущественно для управления трубопроводной арматурой, состоящий из одного или нескольких командных соленоидов с регулируемым ходом сердечника и исполнительным звеном
в виде мембранного привода толкателя, отличающийся тем, что, с целью повышения точности срабатывания и расширения диапазона возможных линейных перемещений толкателя, между командными соленоидами и исполнительным звеном расположен корпус с замкнутой системой заполненных жидкостью каналов, обеспечивающих гидравлическую связь между приводом и исполнительным звеном.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАПИРАЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU324756A1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 1973 |
|
SU389655A1 |
| ТЕХНИЧЕСКАЯ ^'••Иностранцы Херберт Бель и Курт Диттмар(Германская Демократическая Республ 1ка) | 1970 |
|
SU263520A1 |
| ГДРОпубликовано 13.XI 1.1972. Бюллетень Xs 2за 1973Дата опубликования описания 6.П.1973М. Кл. G 06k 7/01G 06d 7/00УДК 681.327(088.8) | 1973 |
|
SU362548A1 |
| ЦИФРОВОЙ ИСПОЛНИТЕЛЬНЫЙ ПРИВОД | 1971 |
|
SU304767A1 |
| РАЗГРУЗОЧНОЕ |УСТРОЙСТВО К ВЕРТИКАЛЬНЫМ ПЛИТОЧНЫМ МОРОЗИЛЬНЫМ АППАРАТАМ | 1967 |
|
SU201250A1 |
| ФОТОАППАРАТ СО ВСТРОЕННЫМ ЭКСПОНОМЕТРОМ | 1971 |
|
SU313383A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 1971 |
|
SU289246A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВИДАЛШ ОПЕРАЦИЙ НА МЕХАНИЧЕСКИХ ВЫЧИСЛИТЕЛЬНЫХ Л'.АШИНАХ | 1970 |
|
SU287400A1 |
| ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАВЛЕНИЙ | 1972 |
|
SU354676A1 |
Риг. I
//
fpu2.3
