1
Изобретение относится к аэромагнитным средствам лОИска и разведки полезных ископаемых.
Известны устройства для компенсации магнитных помех носителя аэромагнитометра в объеме датчиков магнитного поля.
Устройство содержит системы из трех ортогональных катушек, расположенных на прямой, проходящей через центр датчика -магнитометра, внутри магниточувствительного блока на таком расстоянии от датчика магнитометра, 1при -котором магн-итное поле катушек в объе.ме датчиков достаточно равномерно.
Катушки питаются от источника постоянного тока для компенсации постоянных магнитных помех. Для компенсации индуктивных помех катушки питаются током с выхода вспомогательных магнитометров. Для компенсации помех от вих,ревых токов, возникающих в электропроводных массах конструкции носителя при эволюциях в магнит1ном поле Земли, катушки питаются от тех же вспомогательных магнитометров через схемы дифференцирования.
Недостаток известных устройств для компенсации магнитных помех с компенсационными катушками состоит ъ том, что для обеспечения магнитного поля с заданной раъноме рностью Б объеме датчиков мапнито.метра необходимо удалять катушки на большое расстояние от датчиков. Особенно существенен этот недостаток при использовании ядернопрецессионных датчиков магнитного поля. Градиент магнитного поля катушек приводит к резкому затуханию сигнала ядерной лрецессии, а иногда и к выходу из строя магнитометра.
Предложенное устройство для компенсации магнитных помех позволяет простыми техническими средствами повысить кратность компенсации магнитных помех и сократить габариты при заданной кратности компенсации.
Эти преимущества устройства обеспечиваются тем, что оно снабжено дополнительными компенсационными катущками, ориентированными коллинеарно соответствующим основным катушкам и включенным1И последовательно или параллельно с ними, причем отношение магнитных моментов основных и дополнительных катушек выбрано из условия равенства нулю высших производных магнитного потенциала Е центре датчика магнитометра.
На фиг. 1 изображена схема предлагаемого устройства.
Внутри ма-гниточувствительного блока / расположен датчик 2 .магнитометра, система из трех ортогональных в пространстве катушек 3, 4 5, питаемых током от стабилизированного источнпка тока и от вспомогательных 0 магнитометров (не показаны), система из трех
дополнительных ортогональных компенсационных катушек 6, 7, 8, расположенных «а прямой, проходящей через центр катушек 3, 4 5 и центр датчика магнитометра. Дополнительные компенсационные катушки включены последовательно или параллельно с соответствующими ОСНОВНЫМИ катушками и ориентированы так, что их ООН колли неарны.
Магнитные моменты (M I-w-S, где / - сила тока, га - число витков, 5 - площадь в,итка) выбраны такими, чтобы отношение магнитных моментов основных я- дололиительных катушек было равно четвертой степени отношения расстояний от катушек до центра датчика магнитометра
М R у M,,Rj
При таком соотношении магнитных моментов основных и дополнительных катушек первая 1ПроиЗВОДная магнитного толя дополнительной катушки, включенной навстречу основной катушке, комиеноирует первую производную магнитного поля основной катушки, благодаря чему магнитное 1поле в объеме датчика магнитометра становится более равномерным.
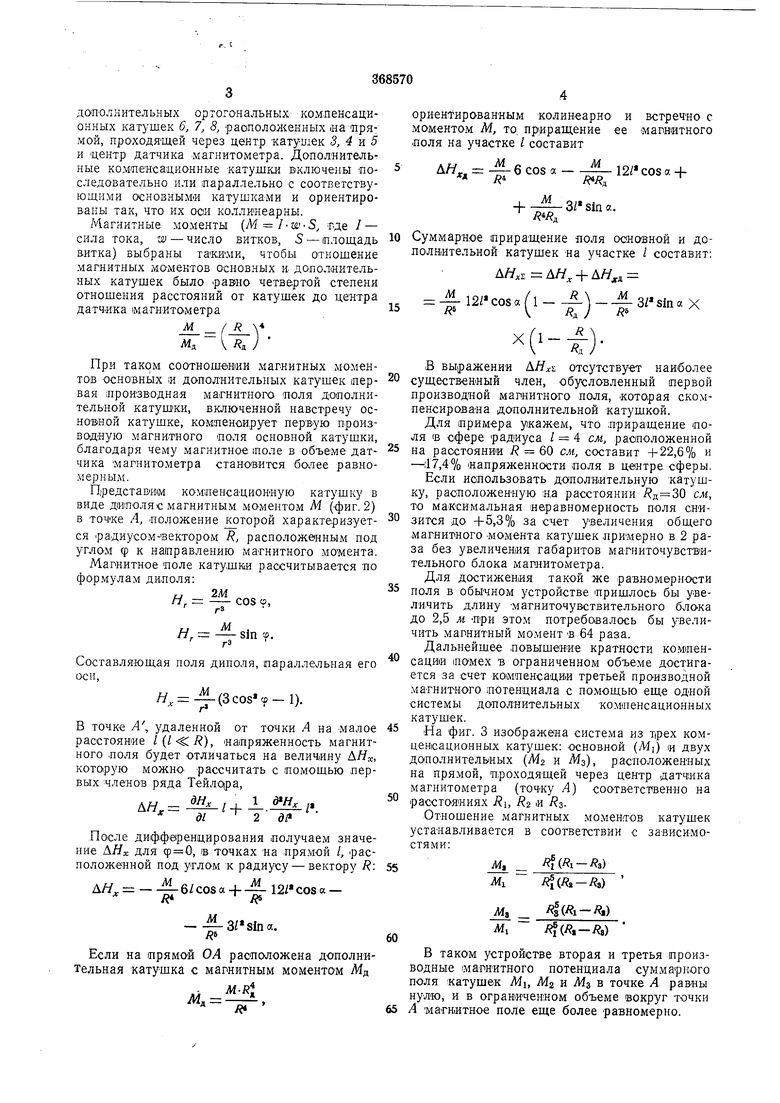
представим ко.чпенсациоННую катушку в виде диполя с магнитным моментом М (фиг. 2) в точке А, положение которой характеризуется радиусом-вектором R, расположенным под углом ф к направлению магнитного момента.
Магнитное поле катушки рассчитывается по формулам дилоля:
//. - COS ср.
гз М
Н -
sin f.
гз
Составляющая поля диполя, параллельная его оси,
М
Н
-( 1).
В точке А удаленной от точки А на -малое расстояние l(), напряженность магнитного поля будет отличаться на велич,ину ДЯ, которую МОЖНО рассчитать с помощью первых членов ряда Тейлора, дН
./+±.
Hj,
/«. 2 д
dl
.После дифференцирования получаем значение ДЯж для ф-О, В точках на прямой /, расположенной под углом -к радиусу - вектОру R:
М
М
- 6/COS а +-: 12/« COS
Л
М
- -i 3/ Slnoc. К.
Если на прямой ОЛ расположена дополнительная катушка с магнитным моментом Мд
M-R
м,
/г«
4
ориентированным колинеарно и встречно с моментом М, то, приращение ее смапнитного поля на участке / составит
М R
М
Я,,
б cos я -
12/«COSa-f
М
.
+
Суммарное приращение поля ооновной и дополнительной катушек на участке / составит:
Д//,,ДЯ, + А//,
- 12/COS а л - -A JW 3/. sin а
irL 12/
X R ) К
R
(X
в вьфажени-и отсутствует наиболее существенный член, обусловленный первой производной малнитного поля, Кото1рая ско.мпенсирована дополнительной катущкои.
Для примера укажем, что приращение поля щ сфере радиуса / - 4 см, расположенной на расстоянии R QQ см, составит +22,6% и , напряженности поля в центре сферы.
Если использовать дополнительную катушку, расположенную на расстоянии см, то максимальная неравномерность поля снизится до -f 5,3% за счет увеличения обш,его .магнитного -момента катушек примерно в 2 раза без увеличения габаритов магниточувствительного блока магнитометра.
Для достижения такой же равномерности поля в обычном устройстве пришлось бы увели.чить длину магниточувствительного блОКг. до 2,5 М при этом потребовалось бы увеличить магнитный момент в 64 раза.
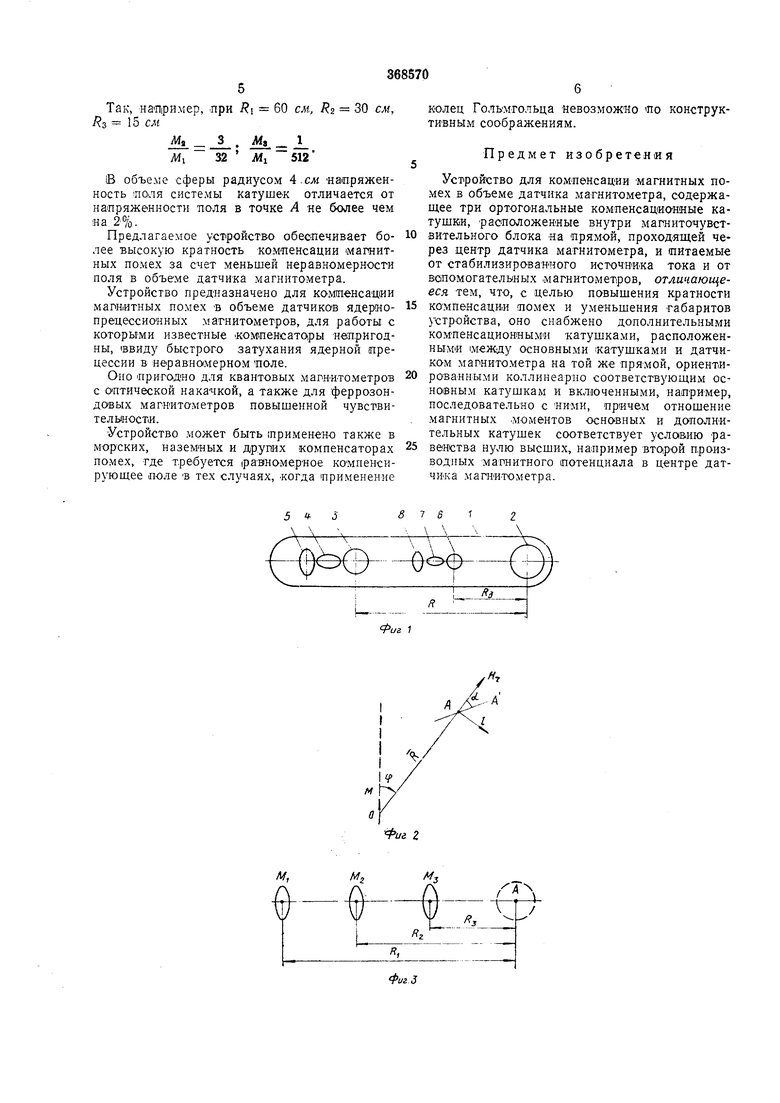
Дальнейшее повышение кратности компенсация помех в ограниченном объеме достигается за .счет компенсации третьей производной .магнитного потенциала с помощью еще одной системы дополнительных коматенсационных катушек.
На фиг. 3 изоб.ражена система из трех комценсационных катушек: основной (Mi) и двух дополнительных (Mz и М), расположенных на прямой, проходящей через центр магнитометра (точку Л) соответственно на расстояниях Ri, Rz и Rz.
Отношение магнитных моментов катушек устанавливается в соответствии с зависимостями:
В таком устройстве вторая и третья производные магнитного потенциала суммарного поля катушек М, М и MZ в точке Л рав-ны нулю, и в ограниченном объеме вокруг точки Л магнитное поле еще более равномерно.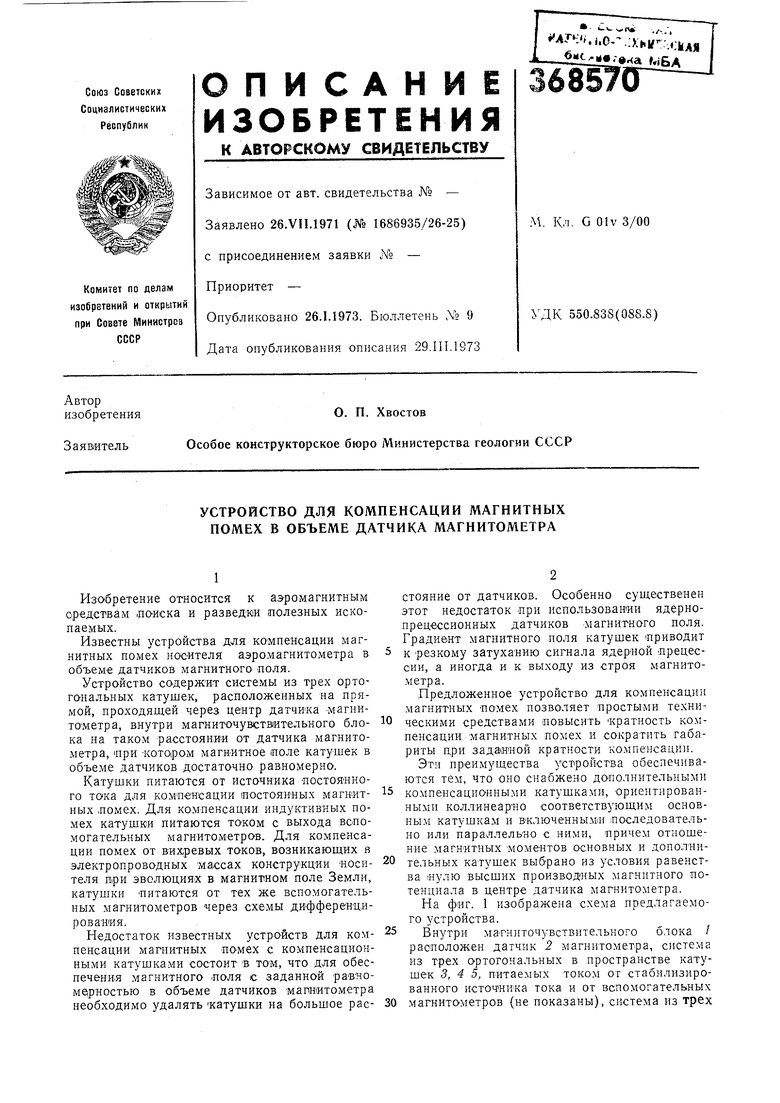
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕЙ ПОМЕХИ В ЦЕНТРЕ МЕРЫ МАГНИТНОЙ ИНДУКЦИИ | 2008 |
|
RU2394251C1 |
| СПОСОБ КОМПЕНСАЦИИ МАГНИТНЫХ ПОМЕХ ЛИНИИ ЭЛЕКТРОТЯГИ НА ПОСТОЯННОМ ТОКЕ | 2006 |
|
RU2319973C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2010 |
|
RU2433420C1 |
| ГРАДИЕНТОМЕТР | 1994 |
|
RU2091806C1 |
| СПОСОБ МАГНИТНЫХ ИЗМЕРЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019859C1 |
| Компонентный дифференциальный магнитометр | 1978 |
|
SU739454A1 |
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| ВИБРАЦИОННЫЙ МАГНИТОМЕТР | 2004 |
|
RU2279689C2 |
