Изобретение относится к области измерений разности индукции магнитного поля, созданного подвижным объектом, на фоне помех от линии электротяги на постоянном токе.
Известен способ компенсации магнитных помех от линии электротяги при поверке высокочувствительных квантовых магнитометров (К.К.Барахнин, Н.В.Студенцов, В.Я.Шифрин. Исследование квантового автокомпенсатора вариаций магнитного поля Земли. Труды метрологических институтов Госстандарта. 1976. Вып.215(275). С.24-26). Однако способ компенсирует в общем случае только однородную часть помех линии тяги.
Известен также способ компенсации магнитных помех, который реализуется устройствами, описанными в монографиях (Афанасьев Ю.В. и др. Средства измерения параметров магнитного поля. Л.: Энергия, 1979. С.227; Афанасьев Ю.В. Феррозондовые приборы. Л.: Энергоатомиздат, 1986. С.111 и 161). Этот способ также компенсирует только однородную часть помехи.
По совокупности существенных признаков, способ (Афанасьев, 1986. С.161) является ближайшим аналогом заявляемого способа и принят в качестве его прототипа.
Известный способ основан на измерении разности индукций магнитных полей, созданных испытуемым подвижным объектом между измерительным и компенсационным датчиками.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является то, что известный способ не компенсирует неоднородную часть помехи линии тяги. Этим недостатком можно было бы пренебречь, при расстоянии между зоной измерения и линией тяги примерно в 8 км и более. Однако на практике расстояние это не выбирают, оно задано в пределах примерно 0,5-3 км. Причем, чем меньше расстояние, тем больше погрешность компенсации, которая в указанном диапазоне расстояний является доминирующей погрешностью при измерении разности магнитной индукции.
Задачей, на решение которой направлено заявляемое изобретение заключается в повышении точности измерения разности магнитной индукции за счет повышения точности компенсации магнитных помех от линии тяги.
Технический результат, получаемый при осуществлении изобретения, заключается в том, что заявляемый способ обеспечивает компенсацию помех, включая и неоднородную часть, с расстояний примерно 500 м и далее.
Указанный технический результат достигается тем, что в заявляемом способе компенсации магнитных помех линии электротяги на постоянном токе, использующем измерение разности индукций магнитного поля, созданного подвижным объектом между измерительным и компенсационным датчиками, в отличие от известного способа, при отсутствии поездов на контрольном участке линии дополнительно и синхронно измеряют компоненту приращения индукции магнитного поля линии в поперечном направлении к ней, а также компоненты упомянутой разности при удаленном объекте, при этом находят три коэффициента пропорциональности между каждой компонентой упомянутой разности и соответствующим значением компоненты приращения, затем из каждого текущего значения каждой компоненты разности, измеренной в присутствии объекта, вычитают соответствующее текущее значение компоненты приращения, умноженное на соответствующий коэффициент пропорциональности.
На фиг.1 изображена первая (идеализированная) модель токопроводов двухколейной прямолинейной линии электротяги на постоянном токе.
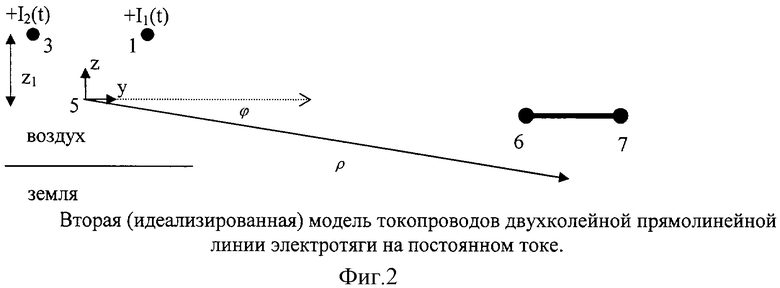
На фиг.2 изображена вторая (идеализированная) модель токопроводов двухколейной прямолинейной линии электротяги на постоянном токе.
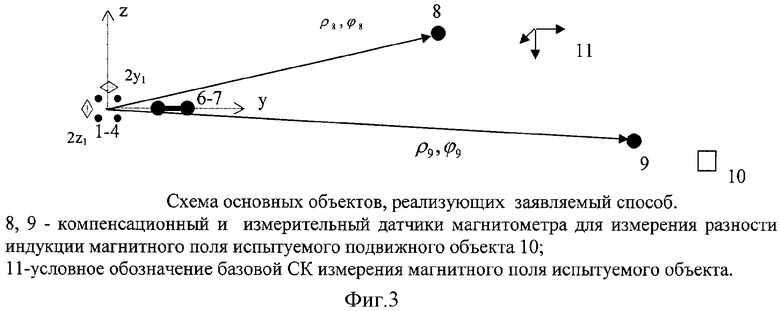
На фиг.3 изображена схема основных объектов, реализующих заявляемый способ.
Модель на фиг.1 включает прямой 1 и обратный 2 токопроводы одной колеи линии, прямой 3 и обратный 4 токопроводы обратной колеи линии. Позиция 5 - след контрольного участка линии, или след продольной оси "х" системы координат (СК) линии "x, y, z". Контрольный участок линии - симметричен относительно начала СК, его длина равна 600-800 м. Позиции 6, 7 - измерительный и компенсационный датчики вспомогательного дифференциального магнитометра на жесткой базе для непрерывных измерений мгновенных значений приращения индукции магнитного поля линии тяги 1-4.
Модель на фиг.2 предполагает, что обратные токи прямых токопроводов 1 и 3 распределены по бесконечной полуплоскости (земля).
Схема на фиг.3 включает позиции 8, 9 - компенсационный и измерительный датчики магнитометра для измерения разности индукции магнитного поля испытуемого подвижного объекта 10. Позиция 11 - условное обозначение базовой СК измерения разности индукции объекта 10.
Заявляемый способ осуществляют следующим образом. По закону Био-Савара-Лапласа (Б.М.Яворский, А.А.Детлаф. Справочник по физике. Наука, 1968. С.427) имеем выражение для индукции магнитного поля от бесконечного прямолинейного провода в СК линии
где B1(ρ1) - индукция от провода 1 с током I1(t) в некоторой точке а, Тл;
ρ1=ρ-r1 - радиус-вектор перпендикуляра, опущенного от провода 1 на точку а, м;
ρ - радиус-вектор перпендикуляра к оси х СК линии, опущенного в точку а, м;
r1 - радиус-вектор перпендикуляра к оси х СК линии, опущенного на провод 1, м;
μ0=4π×10-7 Гн/м - магнитная постоянная;
ρ1=|ρ1| - длина радиус-вектора, м;
ϕ1 - угол, который радиус-вектор ρ1 составляет с осью у СК линии.
Разложим векторную функцию B1(ρ1)=B1(ρ-r1) в ряд Тейлора векторного аргумента ρ, учитывая, что ρ>>r1 (Г.Корн и Т.Корн. Справочник по математике. Наука, 1978 С.173)
 ,
,
где производные берутся по координатам x, y, z вектора ρ:
 .
.
в направлении r1 с координатами x1, y1, z1, т.е.:

Просуммируем (3) для модели на фиг.1 и получим выражение для индукции магнитного поля линии в точке с полярными координатами ρ, ϕ:

Аналогично для модели на фиг.2 получим выражение для индукции магнитного поля линии в точке с полярными координатами ρ, ϕ:

Поскольку по условию ρ>>r1, ограничимся в (4) и (5) первыми членами разложения


Итак, индукция магнитного поля линии пропорциональна сумме токов I1(t)+I2(t), обратно пропорциональна ρ2 для первой модели (фиг.1) и обратно пропорциональна ρ для второй модели (фиг.2) (Поскольку для этой модели обратные низкочастотные токи - I1(t), - I2(t) распределены по бесконечной идеально проводящей полуплоскости, то магнитные поля обратных токов принимаются нулевыми). При ϕ=0 в нуль обращается для первой модели вертикальная составляющая индукции, для второй - горизонтальная.
Первая модель (фиг.1) соответствует физическим воззрениям на рельс, как на идеальный проводник, и на землю (сухую), как на идеальный изолятор. Однако нельзя пренебрегать сопротивлениями стыков рельс, поскольку стыков много. Кроме того, общеизвестно, что сырая земля становится хорошим проводником. Вторая модель (фиг.2) соответствует случаю, когда земля рассматривается как идеальный проводник. Т.е. первая и вторая модели - это крайности, между которыми лежит реальная (неизвестная) модель магнитного поля. Соответственно выражения (6) и (7) описывают магнитные поля линии в двух крайних идеализированных ситуациях. Для простоты дальнейшие выкладки приводятся для первой модели (фиг.1), поскольку для второй модели (фиг.2) они почти аналогичны.
Как показано на фиг.3, на расстоянии порядка 75-100 м от линии измеряют приращение(«Приращение» и «разность» - синонимы. Но мы условно используем термин «приращение» для дифференциального магнитомера с малой базой (0.7-2 м), т.е. для 6-7 (см. фиг.1 и 2), а термин «разность» - применительно к дифференциальному магнитомеру с компенсационным 8 и измерительным 9 датчиками, разнесенными на относительно большое расстояние (500-700 м)) индукции магнитного поля на базе 6-7, взятой на оси у.
Смысл измерения пространственного приращения индукции, а не самой индукции в том, что приращение реагирует только на неоднородную часть поля, которая в нашем случае является информативной частью и не реагирует на сильные однородные поля, например поле Земли. Приращения могут быть измерены с помощью любого из следующих способов (Патент RU 2257593. Способ минимизации погрешностей в дифференциальном магнитометре или Патент RU 2256930. Способ минимизации погрешностей в переносном дифференциальном магнитометре).
С помощью (6) запишем выражение для разности («Приращение» и «разность» - синонимы. Но мы условно используем термин «приращение» для дифференциального магнитометра с малой базой (0.7-2 м), т.е. для 6-7 (см. фиг.1 и 2), а термин «разность» - применительно к дифференциальному магнитометру с компенсационным 8 и измерительным 9 датчиками, разнесенными на относительно большое расстояние (50-700 м)) индукций между измерительным 9 и компенсационным 8 датчиками в базовой СК 11 при достаточно удаленном испытуемом объекте 10
где σ матрица ортогонального преобразования координат из СК линии в базовую СК 11;
ρ8, ρ9, ϕ8, ϕ9 - полярные координаты компенсационного 8 и измерительного 9 датчиков в СК линии.
(В общем случае компонента "х" (9) не останется нулевой после преобразования матрицей σ.)
Итак, три компоненты (9) пропорциональны компоненте у (8), поскольку все четыре компоненты пропорциональны текущему значению суммы токов линии. Поэтому при удаленном объекте 10 синхронно измеряют ряд значений ΔBy6-7(t) и Bx9-8(t)=(B9-B8)x, By9-8(t)=(B9-B8)y, Bz9-8(t)=(B9-B8)z. Откуда с помощью метода наименьших квадратов определяют три коэффициента пропорциональности вида
В дальнейшем при измерении разности индукции магнитного поля объекта 10 из результатов измерений каждого текущего значения компоненты разности вычитают соответствующее текущее значение приращения, умноженное на соответствующий заранее определенный коэффициент пропорциональности
где волнистая линия означает измерение в присутствии объекта 10.
Заявляемый способ основан на плоскопараллельном характере магнитных полей линии (нуль компоненты "х" в выражениях (1)-(8)). При поезде на контрольном участке линии длиной 600-800 м плоскопараллельный характер нарушается. Поэтому интервалы времени, когда поезд оказывается на контрольном участке, исключаются из компенсации помех от линии и соответственно из измерений полей информативного объекта 10.
С помощью выражений (6)-(9) можно получить удобные соотношения для расчета оценок СКО магнитных полей линии:
где σB - СКО индукции магнитного поля, созданного линией электротяги в точке на расстоянии ρ от линии, Тл;
σ1 - СКО суммы токов I1(t)+I2(t) линии, А;


Для второй модели (см. фиг.2) аналог (12) имеет вид: 
В качестве иллюстрации размера погрешности рассчитаем СКО погрешности измерения разности индукции в функции расстояния между линией и компенсационным датчиком 8 при ϕ8=ϕ9=0 при нескольких значениях расстояний l между измерительным 9 и компенсационным 8 датчиками для второй модели (фиг.2) и σ1=55 А. Последнее соответствует экспериментальным данным (Барахнин и др. 1976. С.25). Результаты расчета сведены в таблицу.
Штатные средства измерений разностей индукции магнитного поля подвижного объекта 10 (например, аппаратура М047/2) имеют чувствительные диапазоны измерения ±3 нТ и ±10 нТ. Однако из-за высокого уровня неоднородных помех при расстояниях ρ=500÷2000 м (см. Табл.1) эти чувствительные диапазоны вообще не используются и измерения проводятся на диапазонах ±100 нТ и выше при погрешностях выше нормированных.
Заявляемый способ позволяет компенсировать неоднородные помехи от линии электротяги на постоянном токе при расстояниях ρ≥500 м и l=100-400 м, что дает возможность использовать чувствительные диапазоны ±3 нТ и ±10 нТ и существенно повысить точность измерений на диапазонах ±100 нТ и выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2012 |
|
RU2497139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕЙ ПОМЕХИ В ЦЕНТРЕ МЕРЫ МАГНИТНОЙ ИНДУКЦИИ | 2008 |
|
RU2394251C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО МОМЕНТА КРУПНОГАБАРИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2303792C1 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ПЕРЕНОСНОМ ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2256930C2 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503026C1 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2257593C2 |
| Способ измерения приращения индукции магнитного поля дифференциальным магнитометром | 2021 |
|
RU2789143C2 |
Изобретение относится к области измерения индукции магнитного поля, созданного подвижным объектом, на фоне помех от линии электротяги на постоянном токе. Способ компенсации магнитных помех линии электротяги на постоянном токе заключается в том, что вблизи линии измеряют компоненту приращения индукции магнитного поля линии и синхронно измеряют компоненты разности индукции между измерительным и компенсационным датчиками при удаленном подвижном объекте, находят коэффициенты пропорциональности между каждой компонентой разности и компонентой приращения, затем из каждого текущего значения каждой компоненты разности, измеренной в присутствии объекта, вычитают соответствующее текущее значение компоненты приращения, умноженное на соответствующий коэффициент пропорциональности. Технический результат: компенсация неоднородных помех от линии при измерении полей подвижного объекта на расстоянии 500 м и далее. 3 ил., 1 табл.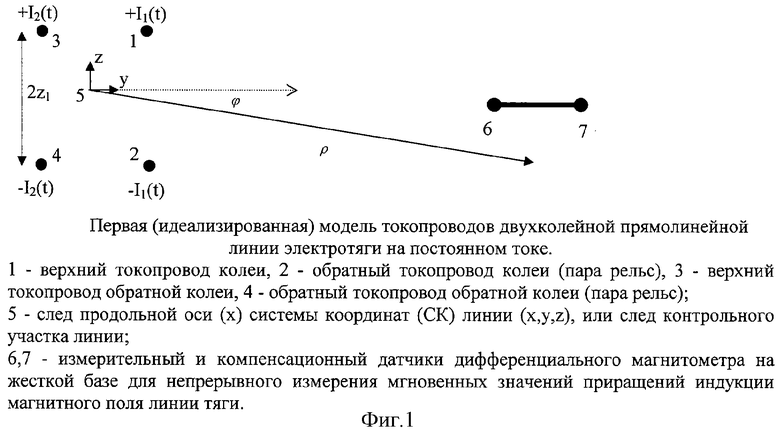
Способ компенсации магнитных помех линии электротяги на постоянном токе, использующий измерение разности индукций магнитного поля, созданного подвижным объектом между измерительным и компенсационным датчиками, отличающийся тем, что при отсутствии поездов на контрольном участке линии дополнительно и синхронно измеряют компоненту приращения индукции магнитного поля линии в поперечном направлении к ней, а также компоненты упомянутой разности при удаленном объекте, при этом находят три коэффициента пропорциональности между каждой компонентой упомянутой разности и соответствующим значением компоненты приращения, затем из каждого текущего значения каждой компоненты разности, измеренной в присутствии объекта, вычитают соответствующее текущее значение компоненты приращения, умноженное на соответствующий коэффициент пропорциональности.
| Афанасьев Ю.В | |||
| Феррозондовые приборы | |||
| Л., Энергоатомиздат, 1986, с.161 | |||
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2257593C2 |
| Компонентный дифференциальный магнитометр | 1978 |
|
SU739454A1 |
| Способ получения ацетата ацетопропилового спирта | 1975 |
|
SU614091A1 |
| US 5990677 A, 11.23.1999. | |||

