КСущноЬть предлагаемой транспортной системы заключается в том, что дорожное полотно ее выполнено в виде во1нутого цилиндрического потока, а подвижной состав представляет собою конструкцию, опирающуюся на две расположенные по концам вагона опоры в форме нолых тел вращения со сферической поверхностью и с двигателем, помещенным внутри указанных тел вращения.
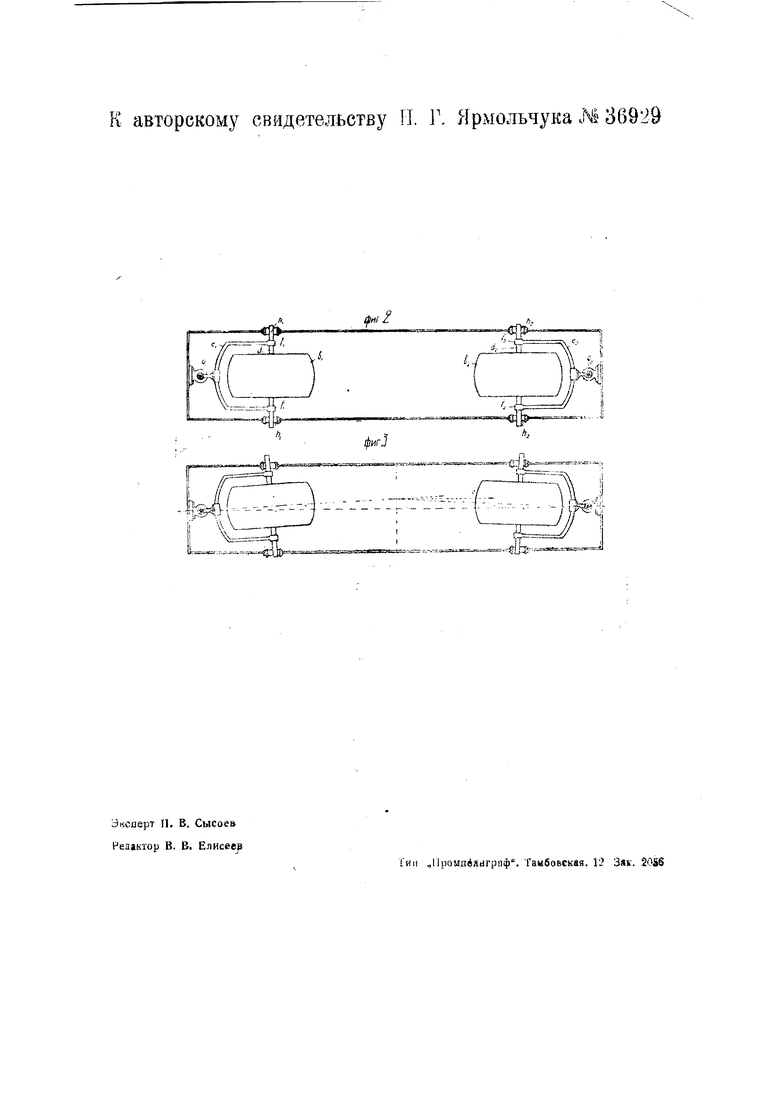
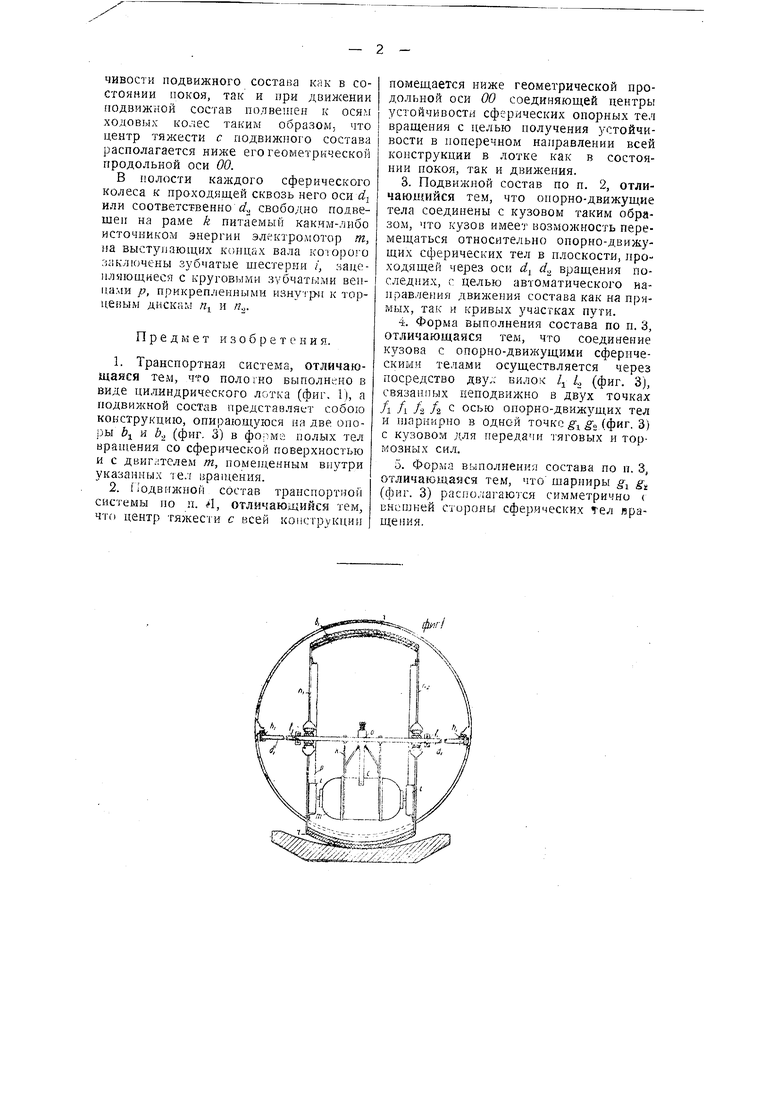
На чертеже фиг. 1 изображает поперечный разрез подвижного состава предлагаемой транспортной системы по оси сферической опоры, служащей ходовым колесом; фиг. 2-план вагона на прямом участке пути; фиг. 3-то же на закруглении.
Кузов вагона предлагаемой транспортной системы имеет удобообтекаедчую форму и нодвещен к осям d и d двух расположенных по концам его опор Й1 и Ь., выполненных, каждая, в виде полого тела вращения со сферической поверхностью, например в виде полого щара, усеченного двумя симметрично расположенными по отношению к продольной оси вагона вертикальными плоскостями. Сферические опоры подвижного состава покоятся в вогнутом цилиндрическом лотке а, образую(439)
щем дорожное полотно предлагаемой Транспортной системы, я служат Ko.ie.сами подвижного состава. В целях смягчения ударов о неровности лоткового пути наружная поверхность сферических колес Ь и Ло может быть снабжена резиновой или другой упругой обкладкой л
Подвеска кузова вагона к осям d и d., выполнена таким -образом, что допускает перемещения кузова относительно сферических колес й и Ь в горизонтальной плоскости, проходящей через оси d и d этих колес, что необходимо дли автоматического направления движения подвижного состава как на прямых, так и на кривых уч;5стках пути, а также для осуществления радиальной установки ходовых колес при движении вагона по закруглению. С указанными целями, а также для передачи кузову тяговых и тормозных усилий, буксы /, п h., подпижпого состава неплотно охватывают цапфы осей d и d.2, соединенных с кузовом подвижного состава посредством вилок е и е.,, поворотно прикрепленных к кузову шарнирами g- и g.,, симметрично расположенными с вне:пней стороны сферических ходовых KO.iec b и b. Для обеспечения поперечной устойчивости подвижного состава как в состоянии покоя, так и при движении подвижной состав подвешен к осям ходовых колес таким образом, что центр тяжести с подвижного состава располагается ниже его геометрической продольной оси 00.
В полости каждого сферического колеса к проходящей сквозь него оси «fj или соответственно и., свободно подвешен на раме k питаемый какид1-либо источником энергии электромотсф т, на выступающих концах вала которого заключены зубчатые шестерни /, нацепляющиеся с круговыми зубчатыми венцами р, прикрепленными изнутри к торцевым дискам «1 и /г.,.
Предмет изобретения.
1.Транспортная система, отличающаяся тем, что полотно выполнено в виде цилиндрического лотка (фиг. Г), а подвижной состав представляет собою конструкцию, опирающуюся на две опоры Ь и Ь., (фиг. 3) в полых тел вращения со сферической поверхностью и с двигателем т, помещенным внутри указанных тел 1фап1ения.
2.Подвижной состав транспортноп системы по н. Л, отличаюягийся тем, что центр тяжести с всей конструкция
помещается ниже геометрической продольной оси 00 соединяющей центры устойчивости сферических опорных тел вращения с целью получения устойчивости в нонеречном направлении всей конструкции в лотке как в состоянии покоя, так и движения.
3.Подвижной состав по н. 2, отличающийся тем, что онорно-движущие тела соединены с кузовом таким образом, что кузов имеет возможность перемещаться относительно опорно-движущих сферических тел в плоскости, лроходящей через оси d d, вращения последних, с целью автоматического направления движения состава как на прямых, так и кривых участках пути.
4.Форма выполнения состава по п. 3, отличающаяся тем, что соединение кузова с опорно-движущими сферическими телами осуществляется через посредство дву.: вилок 4 /., (фиг. 3), связанных неподвижно в двух точках /: /1 /а /2 - осью опорно-движладих тел и HjapHnpHo в одной точке g,, (фиг. 3) с кузовом для передачи тяговых н тормозных сил.
5.Форма выполнения состава по н. 3, отличающаяся тем, что шарниры g g (фиг. 3) располагаются симметрично внешней стороны сферических тел вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНОЙ СОСТАВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2001 |
|
RU2188775C1 |
| ДВУХКОЛЕСНЫЙ ВАГОН С ДВУМЯ РАСПОЛОЖЕННЫМИ ПО КОНЦАМ ВАГОНА КОЛЕСАМИ | 1929 |
|
SU33169A1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА КОНВЕРТИРУЕМОГО ТИПА | 1999 |
|
RU2158211C1 |
| ТРАНСПОРТНАЯ СИСТЕМА С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ "ТРАНСЛИД-МИИТ" | 2001 |
|
RU2206465C1 |
| Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом | 2017 |
|
RU2678917C2 |
| Способ обнаружения вагонов с отрицательной динамикой | 2023 |
|
RU2806916C1 |
| Транспортное устройство | 1933 |
|
SU40400A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УСТРОЙСТВАМИ ДЛЯ ПРОТИВОДЕЙСТВИЯ БОКОВОЙ КАЧКЕ | 2006 |
|
RU2406630C2 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| Транспортное устройство | 1979 |
|
SU846349A1 |