1
Известен способ позиционирования квадрантных углов поворотных систем, основанный на преобразовании угла поворота в сигналы, изменяющиеся по закону синуса и косинуса.
Цель изобретения - расширить диапазон позиционирования квадрантных углов.
Это достигается тем, что формируют опорный сигнал и изменяют угол поворота до получения сначала минимума разности между опорным сигналом и сигналом, изменяющимся по закону косинуса (синуса), а затем - минимума сигнала, изменяющегося по закону синуса (косинуса).
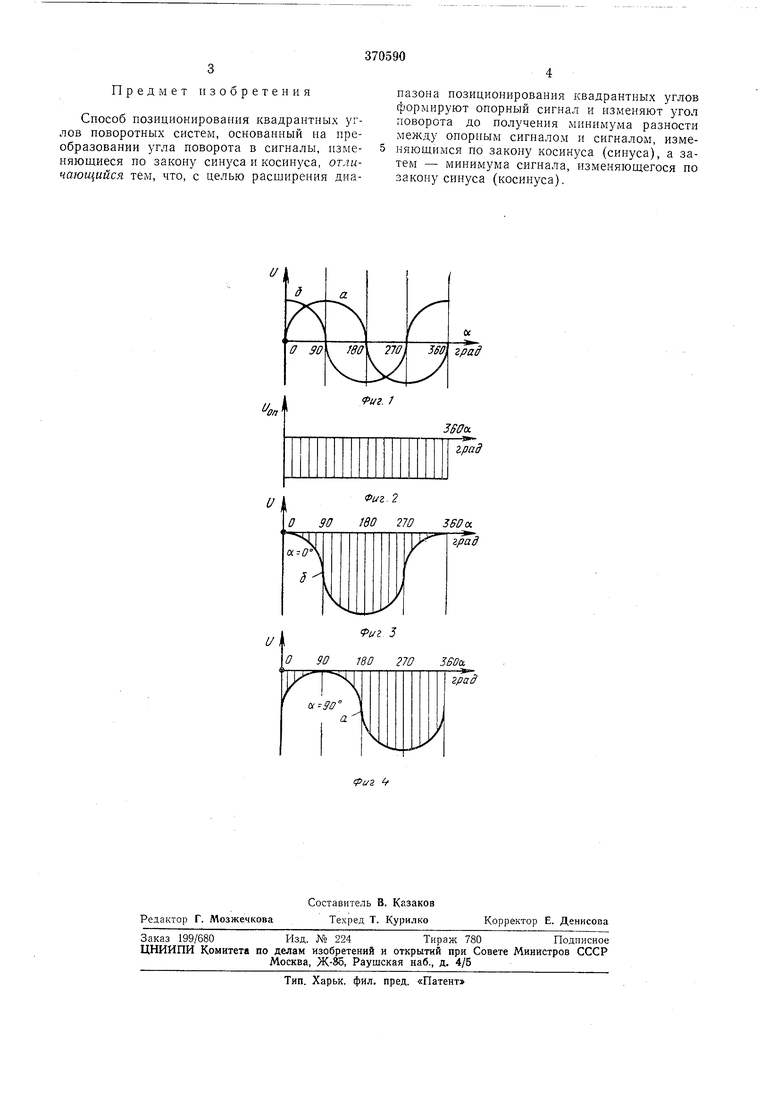
На фиг. 1 показана эпюра сигнала, изменяющегося по закону синуса (1а) и сигнал, изменяющейся по закону косинуса (16); на фиг. 2 - спорный сигнал; на фиг. 3-разностный сигнал при позиционирОва ии квадрантного угла 0°; на фиг. 4 - разностный сигнал при позиционировании квадрантного угла 90°.
Способ реализуется следующим образом.
Грубое приведение системы в квадрантный угол 0° производят путем сравнения выбранного с определенной фазой опорного сигнала (фиг. 2) с сигналом, изменяющимся по закону косинуса (фиг. 16). При этом в пределах одного оборота системы получают такое угловое положение, когда сигнал рассогласования между опорным и косинусным сигналами наименьший (фиг. 3).
Это угловое положение системы является близким к квадрантному углу 0°, но так как крутизна сигнала рассогласования от угла поворота при этом близка к наименъщей, то и точность установления квадрантного угла невысокая.
Более точное приведение системы в заданный квадрантный угол осуществляют по сигналу, изменяющемуся по закону синуса, который находится около нулевого положения и крутизна которого от угла поворота при этом наибольщая.
Приведение системы в положение квадрантного угла 90° производят аналогичным образом, только грубое приведение системы осуществляют путем сравнения опорного сигнала с сигналом, изменяющимся по закону
синуса, а точное приведение осуществляют по сигналу, изменяющемуся по закону косинуса.
Для приведения системы в положения квадрантных углов 180° или 270° изменяют фазу опорного сигнала и вновь производят аналогичные операции.
Таким образом, заданный квадрантный угол определяют выбором фазы опорного сигнала и сигнала, изменяющегося по закону синуса или косинуса.
Предмет изобретения
Способ позиционирования квадрантных углов поворотных систем, основанный на преобразовании угла поворота в сигналы, изменяющиеся по закону синуса и косинуса, отличающийся тем, что, с целью расширения диапазона позиционирования квадрантных углов формируют опорный сигнал и изменяют угол поворота до получения минимума разности между опорным сигналом и сигналом, изменяющимся по закону косинуса (синуса), а затем - минимума сигнала, изменяющегося по закону синуса (косинуса).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифроаналоговая следящая система | 1988 |
|
SU1697055A1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ КВАДРАНТНЫХ УГЛОВ | 1972 |
|
SU359636A1 |
| Способ определения высоты полёта низколетящей цели моноимпульсной РЛС сопровождения в реальном масштабе времени | 2023 |
|
RU2816168C1 |
| Преобразователь угол-код | 1975 |
|
SU520607A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1580554A1 |
| Двухканальная следящая система | 1983 |
|
SU1200236A1 |
| ПРЕОБРАЗОВАТЕЛЬ КОДА В УГОЛ ПОВОРОТА ВАЛА | 1969 |
|
SU251955A1 |
| Способ определения параметров датчиков угла | 1980 |
|
SU890426A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| ИНФРАНИЗКОЧАСТОТНЫЙ АНАЛИЗАТОР ПЕРЕДАТОЧНЫХФУНКЦИЙ | 1965 |
|
SU174805A1 |
аа
г
О 90
и О 90 180 270 360 а.
и О 90 180 270 ЗБОй.
град
Jffdl
Фиг. J
Фиг. 2
Фиг 3
