Известен одноковшовый экскаватор, включающий привод с поворотной платформой с венцовой шестерней,, устройство для учета показателей работы с датчиками полного тока тяги, динамической составляющей тока подъемл, блок учета веса груза, блок учета циклов, блок учета производительного времени, блок учета угла поворота, блок питания, счетчик импульсов.
Предлагаемый экскаватор позволяет повысить точность учета. Достигается это тем, что устройство для учета показателей работы выполнено со смонтированным на поворотной платформе и взаимодействующим с зубьями венцовой щестерни датчиком угла поворота, выход которого соединен со входом усилитеЛЯ, выход которого, в свою очередь, подключен к счетчику импульсов. Датчик угла поворота выполнен в виде магнитно-индукционного элемента.
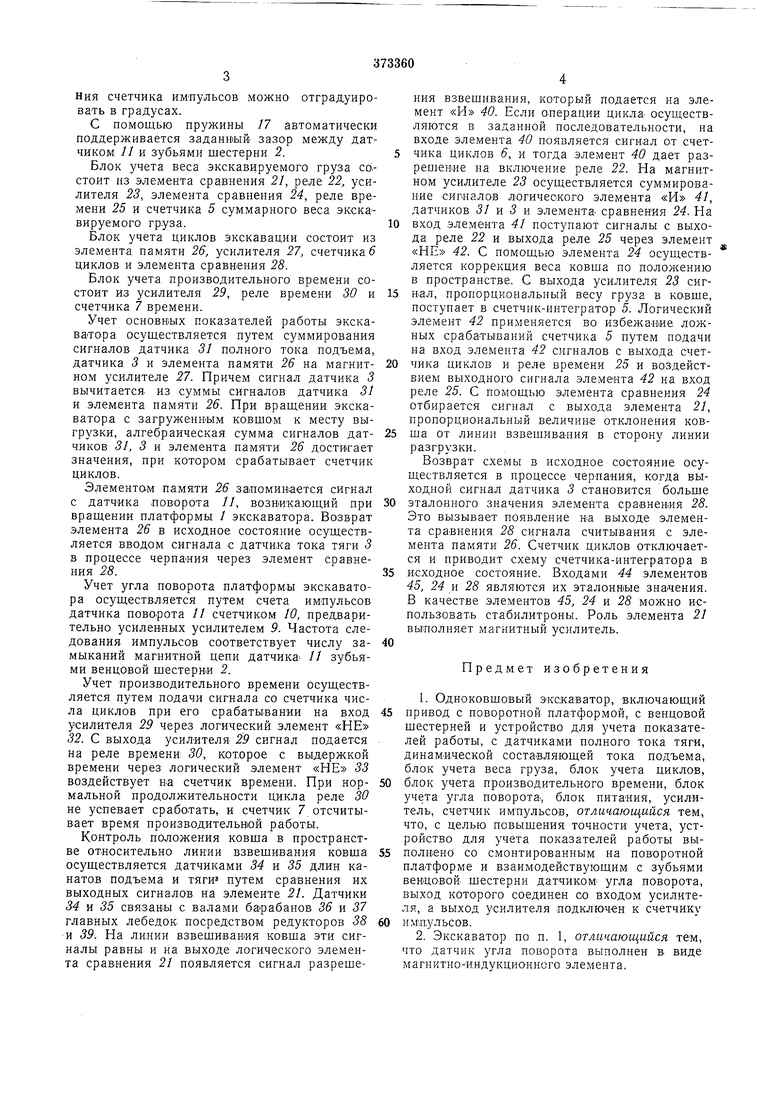
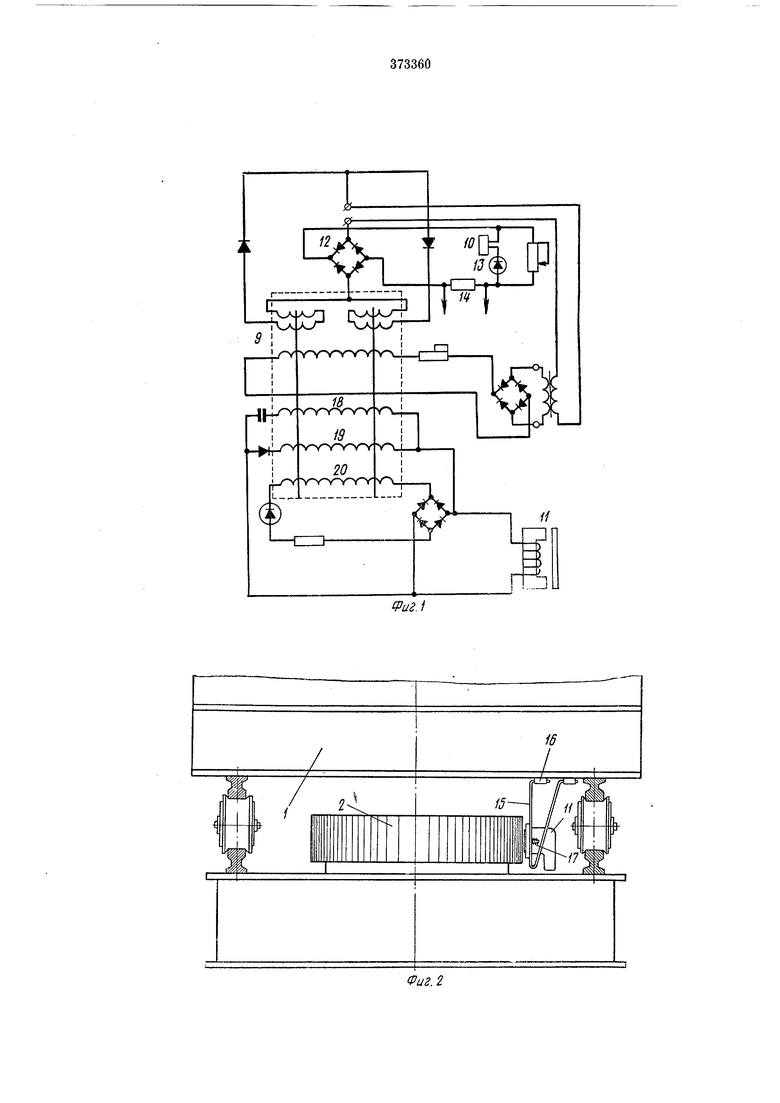
На фиг. 1 представлена схема блока учета угла поворота платформы экскаватора; нафиг. 2- установка датчика угла поворота; на фиг. 3- функциональная схема устройства для учета показателей работы одноковшового экскаватора.
Одноковшовый экскаватор включает привод с поворотной платформой 1 и венцовой шестерней 2, устройство 3 для учета показателей
работы с датчиками полного тока тяги, динамической составляющей 4 тока подъема, блок учета веса груза со счетчиком 5, блок учета циклов со счетчиком б, блок учета производительного времен-и со счетчиком 7, блок 8 питания, блок учета угла поворота платформы экскаватора, состоящий из магнитного усилителя 9, счетчика импульсов 10, датчика // угла поворота, выпрямительного моста 12,
стабилитрона 13, токового шунта 14. Датчик 11 выполнен в виде магнитно-индукционного элемента.
Работает устройство следующим образом. Датчик 11 подвешен с помощью кронштейна 15, упора 16 и пружины 17 к П01воротн0й платформе экскаватора /, и при вращении платформы зубья венцовой шестерни 2 поочередно замыкают магнитную цепь датчика, на выходе которого возникают электрические
импульсы напряжения. Эти импульсы подаются в обмотки управления 18, 19 и 20 магнитного усилителя 9, rfa выходе «оторого (в рабочей цепи) возникают импульсы тока, вызывающие -срабатывание счетчика импульсов
10. Каждому зубу шестерни соответствует импульс тока, который можно оценить в градусах по формуле - , где Z - число зубьев
30 венцовой шестерни. Таким образом, показания счетчика им-пульсов можно отградуировать в градусах.
С помощью пружины /7 автоматически поддерживается заданвый зазор между датчиком // и зубьями шестерни 2.
Блок учета веса экскавируемого груза со.стоит из элемента сравнения 21, реле 22, усилителя 23, элемента сравнения 24, реле времени 25 и счетчика 5 суммарного веса экска-вируемого груза.
Блок учета циклов экскавации состоит из элемента памяти 26, усилителя 27, счетчика циклов и элемента сравнения 28.
Блок учета производительного времени состоит из усилителя 29, реле времени 30 и счетчика 7 времени.
Учет основных показателей работы экскаватора осуществляется путем суммирования сигналов датчика 31 полного тока подъема, датчика 3 и элемента памяти 26 на магнитном усилителе 27. Причем сигнал датчика 3 вычитается, из суммы сигналов датчика 31 и элемента памяти 26. При вращении экскаватора с загруженным ковшом к месту выгрузки, алгебраическая сумма сигналов датчиков 31, 3 и элемента памяти 26 достигает значения, при котором срабатывает счетчик циклов.
Элементом памяти 26 заломин:ается сигнал с датчика поворота 11, возникающий при вращепии платформы / экскаватора. Возврат элемента 26 в исходное состояние осуществляется вводом сигнала с датчика тока тяги 3 в процессе черпа«ия через элемент сравнения 28.
Учет угла поворота платформы экскаватора осуществляется путем счета импульсов датчика поворота // счетчиком 10, предварительно усиленных усилителем 9. Частота следования импульсов соответствует числу замыканий магнитной цепи датчика. // зубьями венцовой шестерни 2.
Учет производительного времени осуществляется путем подачи сигнала со счетчика числа циклов при его срабатывании на вход усилителя 29 через логический элемент «НЕ 32. С выхода усилителя 29 сигнал подается на реле времени 30, которое с выдержкой времени через логический элемент «НЕ 33 воздействует счетчик времени. При нормальной продолжительности цикла реле 30 не успевает сработать, и счетчик 7 отсчитывает время произв.одительвой работы.
Контроль положения ковща в пространстве от-носительно линии взвешивания ковша осуществляется датчиками 34 и 35 длин канатов подъема и тяги путем сравнения их выходных сигналов на элементе 21. Датчики 34 и 35 связаны с валами барабанов 36 и 37 главных лебедок, посредством редукторов 38 и 39. На линии взвешивания ковша эти сигналы равны и на выходе логического элемента сравнения 21 появляется сигнал разрешения взвешивания, который подается на элемент «И 40. Если о.перации цикла, осуществляются в заданной последовательности, на входе элемента 40 появляется сигнал от счетчика циклов 6, и тогда элемент 40 дает разрешение на включение реле 22. На магнитном усилителе 23 осуществляется суммирование сигналов логического элемента «И 41, датчиков 5/ и 5 и элемента, сравнения 24. На вход элемента 41 поступают сигналы с выхода реле 22 и выхода реле 25 через элемент «НЕ 42. С помощью элемента 24 осуществляется коррекция веса ковша по положению в пространстве. С выхода усилителя 23 сигн-ал, пропорциональный весу груза в ковше, поступает в счетчик-интегратор 5. Логический элемент 42 применяется во избежание ложных срабатываний счетчика 5 путем подачи на вход элемента 42 сигналов с выхода счетчика циклов и реле времени 25 и воздействием выходного сигнала элемента 42 на вход реле 25. С помощью элемента сравнения 24 отбирается сигнал с выхода элемента 21, пропорциональный величине отклонения ковша от линии взвешивания в сторону линии разгрузки.
Возврат схемы в исходное состояние осуществляется в процессе черлания, когда выходной сигнал датчика 3 становится больще эталонного значения элемента сравнения 28. Это вызывает появление на выходе элемента сравнения 23 сигнала считывания с элемента памяти 26. Счетчик циклов отключается и приводит схему счетчика-интегратора в исходное состояние. Входами 44 элементов 45, 24 и 28 являются их эталонные значения. В качестве элементов 45, 24 и 28 можно использовать стабилитроны. Роль элемента 21 выполняет магнитный усилитель.
Предмет изобретения
1.Одноковшовый экскаватор, включающий привод с поворотной платформой, с венцовой шестерней и устройство для учета показателей работы, с датчиками полного тока тяги, динам.ической составляющей тока подъема, блок учета веса груза, блок учета циклов, блок учета производительного времени, блок учета угла поворота., блок питания, усилитель, счетчик импульсо.в, отличающийся тем,, что, с целью повышения точности учета, устройство для учета показателей работы выполнено со смонтированным на поворотной платформе и взаимодействуюшим с зубьями венЦовой шестерни датчиком угла поворота, выход которого соединен со входом усилителя, а выход усилителя подключен к счетчику
ИМИЛЛЬСОВ.
2.Экскаватор по п. 1, отличающийся тем, что датчик угла поворота выполнен в виде магнктно-индукционного элемента.