,1
Изобретение относится к горнодобывающей промышленности и может быть использовано для автоматического контроля и учета производительности, рабочих состояний, времени чистой работы, простоя и шагания экскаватора и передачи полученной информации на диспетчерский пункт по радиотелеметрическому каналу для диспетчерского учета.
Цель изобретения - повышение точности учета производительности работы шагающего экскаватора.
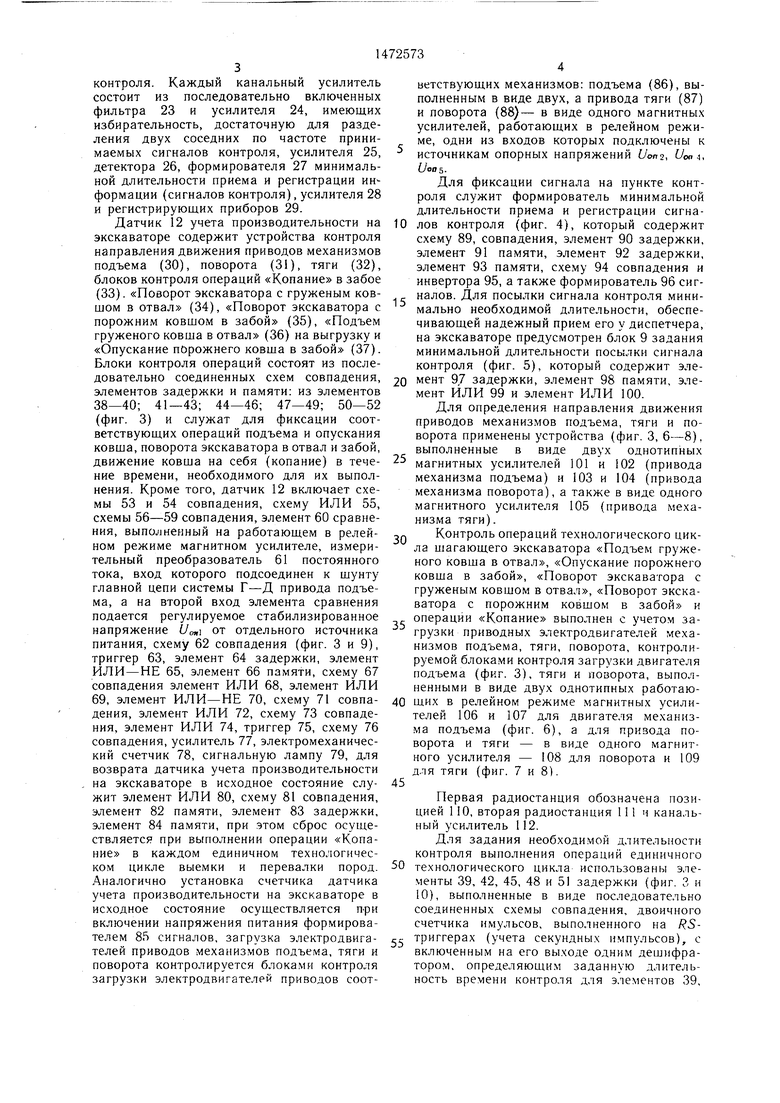
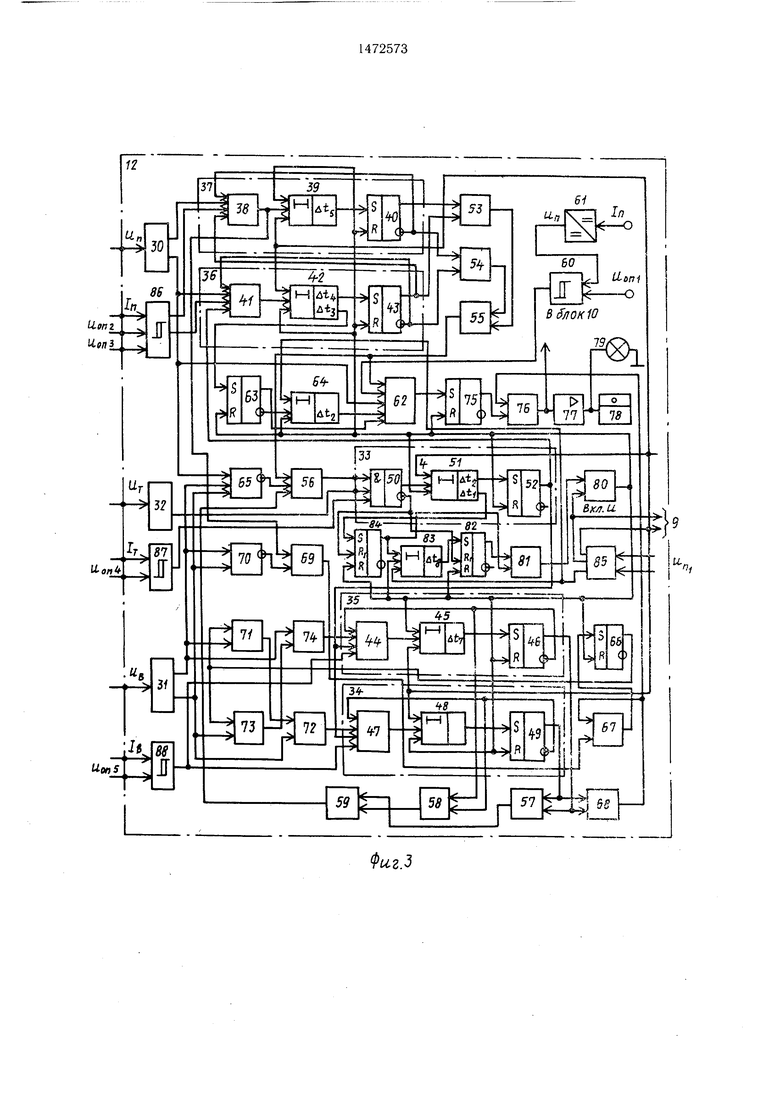
На фиг. 1 изображена структурная схема передающей части устройства; на фиг. 2 - структурная схема приемной части устройства, располагаемой у диспетчера (пункт контроля}; на фиг. 3 - функциональная схема датчика учета производительности на экскаваторе; на фиг. 4 - схема формирователя минимальной длительности приема и регистрации сигналов контроля; на фиг. 5 - схема блока задания минимальной длительности посылки сигналов контроля; на фиг. б - функциональная схема устройства определения направления движения привода подъема и блока контроля загрузки электродвигателя подъема; на фиг. 7 - функциональная схема устройства определения направления движения привода вращения (поворота) и блока контроля загрузки электродвигателя поворота; на фиг. 8 - функциональная схема устройства определения направления движения привода тяги и блока контроля загрузки электродвигателя тяги; на фиг. 9 - схема магнитного усилителя контроля загрузки ковша грунтом; на фиг. 10 - функциональные схемы блоков контроля операции опускания порожнего и подъема груженого ковша (поворота в отвал в с груженым и порожним в забой ковшом) и функциональные схемы элементов задержки; на фиг. 11 -
функциональная схема формирователя сигналов; на фиг. 12 - функциональная схема коммутатора 10; на фиг. 13 -- форма передаваемых сигналов контроля и их длительности. ,
Радиотелеметрическое устройство контроля и учета работы шагающего экскаватора содержит первую ультракоротковолновую радиостанцию, которая включает передатчик 1 с частотным модулятором 2, супергетеродинный приемник 3 с дискриминатором 4, который согласован с выходным низкочастотным усилителем с помощью эмиттерного повторителя 5, и коммутатор 6 управления радиостанцией с микрофонной
трубкой, фильтр 7 звуковых частот для ограничения ширины полосы телефонного канала и ослабления таким образом влияния телефонного канала на работу устройства в режиме передачи сигнала контроля, шифратор 8, блок 9 задания минимальной длительности посылки сигналов контроля, коммутатор 10, датчики И информации, установленные на каждом контролируемом механизме, датчик 12 учета производительности на экскаваторе, вторую радиостанцию,
которая включает супергетеродинный приемник 13 с дискриминатором 14, согласованным с выходным низкочастотным усилителем с помощью эмиттерного повторителя 15, коммутатор 16 управления радиостанцией с микрофонной трубкой, передатчик 17 и частотный модулятор 18, фильтр 19 звуковых частот, полосовой фильтр 20 надтонального диапазона для отделения сигналов контроля от сигналов телефонного канала, групповой резонансный усилитель 21, групповой амплитудный детектор 22, переносящий
спектр всех сигналов контроля из надтонального в субтональный диапазон. К выходу группового детектора подключены канальные усилители по числу принимаемых сигналов
контроля. Каждый канальный усилитель состоит из последовательно включенных фильтра 23 и усилителя 24, имеющих избирательность, достаточную для разделения двух соседних по частоте принимаемых сигналов контроля, усилителя 25, детектора 26, формирователя 27 минимальной длительности приема и регистрации ин формации (сигналов контроля), усилителя 28 и регистрирующих приборов 29.
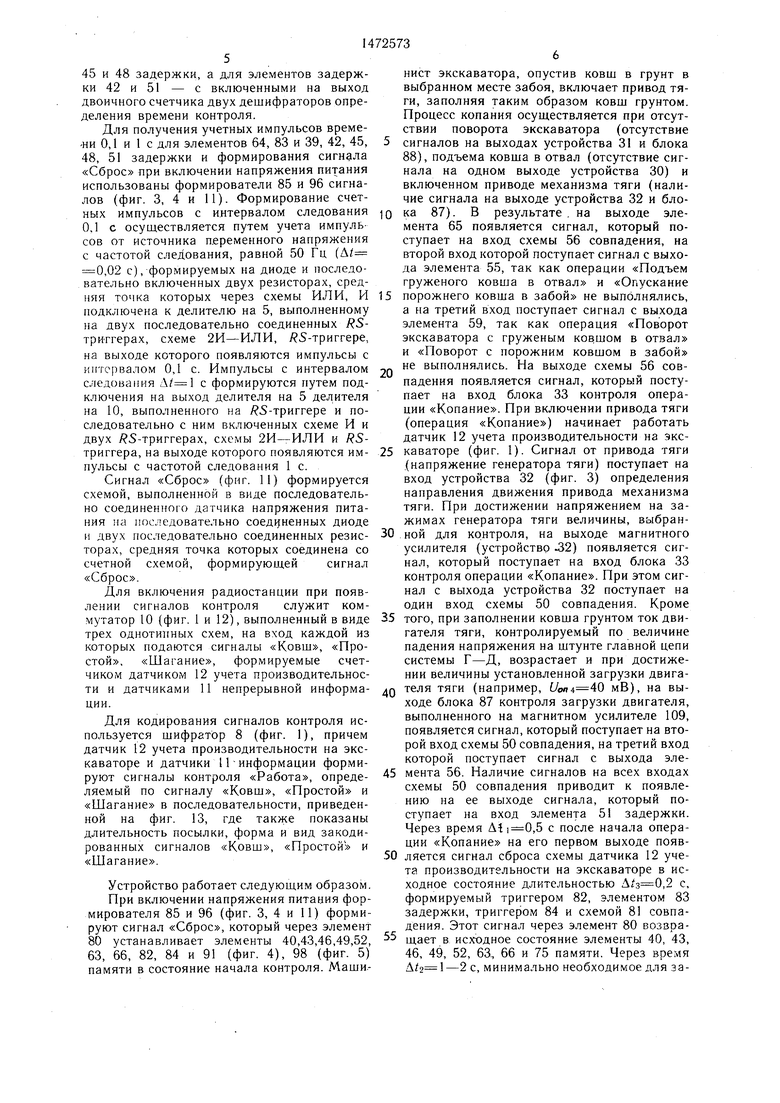
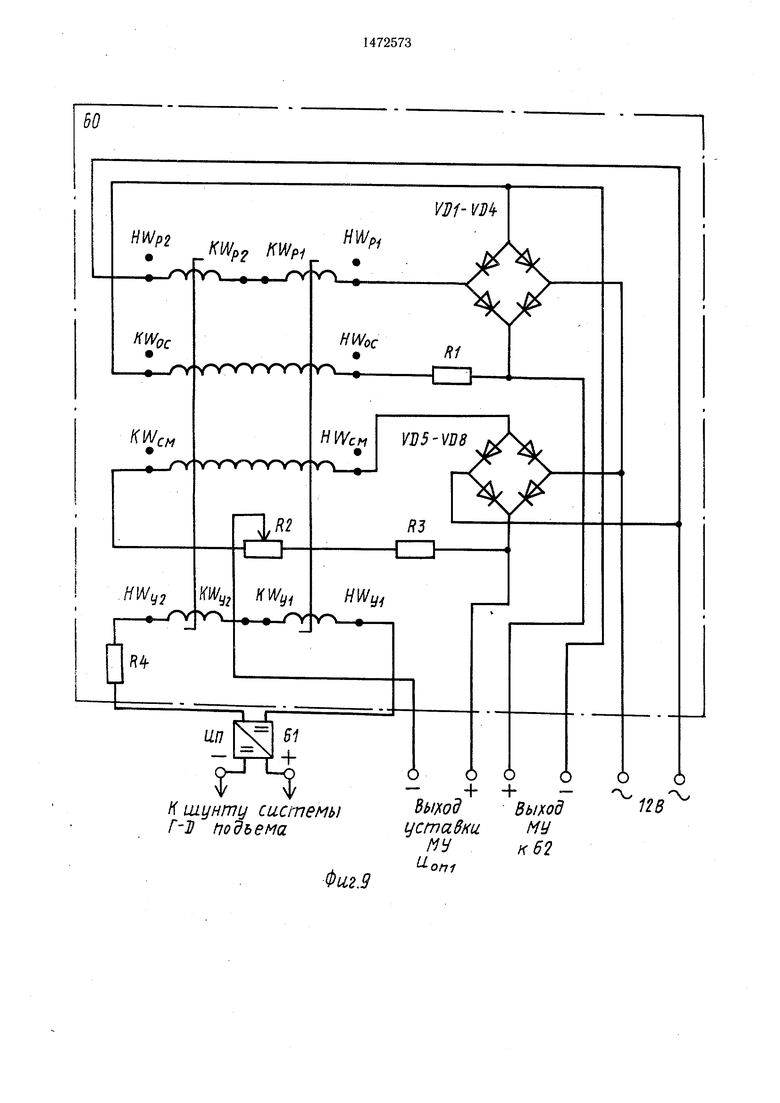
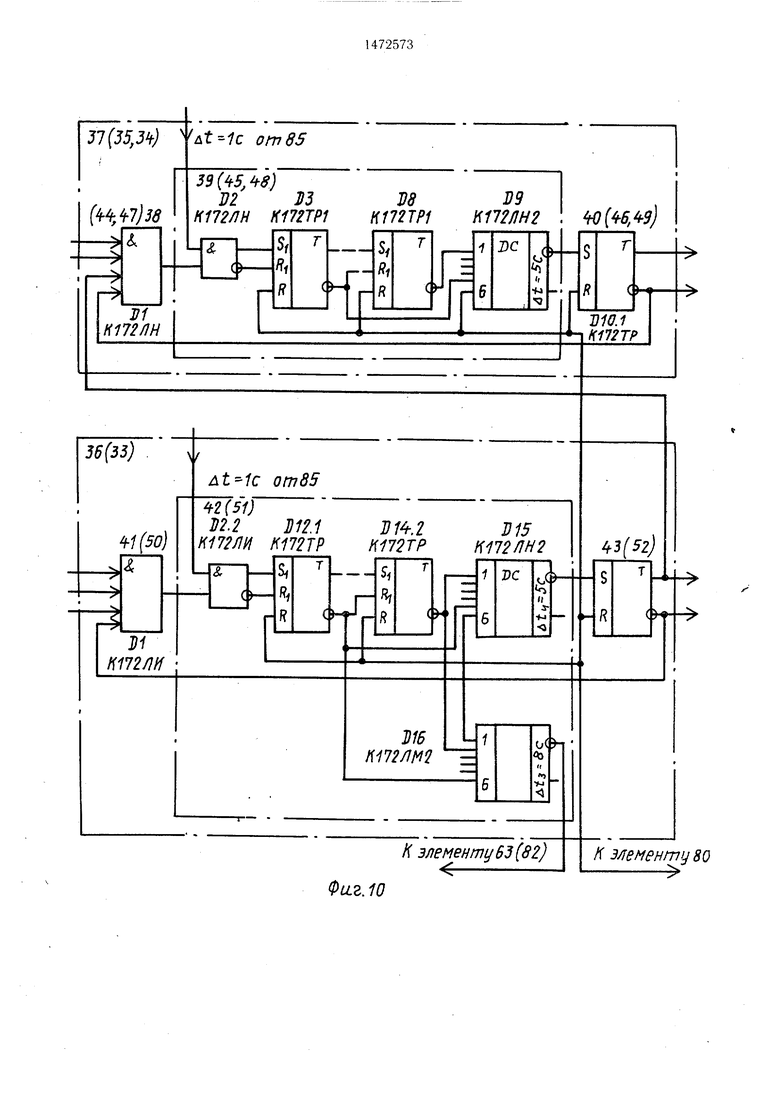
Датчик 12 учета производительности на экскаваторе содержит устройства контроля направления движения приводов механизмов подъема (30), поворота (31), тяги (32), блоков контроля операций «Копание в забое (33). «Поворот экскаватора с груженым ков- щом в отвал (34), «Поворот экскаватора с порожним ковщом в забой (35), «Подъем груженого ковша в отвал (36) на выгрузку и «Опускание порожнего ковща в забой (37). Блоки контроля операций состоят из последовательно соединенных схем совпадения, элементов задержки и памяти: из элементов 38-40; 41-43; 44-46; 47-49; 50-52 (фиг. 3) и служат для фиксации соответствующих операций подъема и опускания ковща, поворота экскаватора в отвал и забой, движение ковща на себя (копание) в течение времени, необходимого для их выполнения. Кроме того, датчик 12 включает схемы 53 и 54 совпадения, схему ИЛИ 55, схемы 56-59 совпадения, элемент 60 сравнения, выполненный на работающем в релейном режиме магнитном усилителе, измерительный преобразователь 61 постоянного тока, вход которого подсоединен к щунту главной цепи системы Г-Д привода подъема, а на второй вход элемента сравнения подается регулируемое стабилизированное напряжение t/o от отдельного источника питания, схему 62 совпадения (фиг. 3 и 9), триггер 63, элемент 64 задержки, элемент ИЛИ-НЕ 65, элемент 66 памяти, схему 67 совпадения элемент ИЛИ 68, элемент ИЛИ 69, элемент ИЛИ-НЕ 70, схему 71 совпадения, элемент ИЛИ 72, схему 73 совпадения, элемент ИЛИ 74, триггер 75, схему 76 совпадения, усилитель 77,электромеханический счетчик 78, сигнальную лампу 79, для возврата датчика учета производительности на экскаваторе в исходное состояние служит элемент ИЛИ 80, схему 81 совпадения, элемент 82 памяти, элемент 83 задержки, элемент 84 памяти, при этом сброс осуществляется при выполнении операции «Копание в каждом единичном технологическом цикле выемки и перевалки пород. Аналогично установка счетчика датчика учета производительности на экскаваторе в исходное состояние осуществляется при включении напряжения питания формирователем 85 сигналов, загрузка электродвигателей приводов механизмов подъема, тяги и поворота контролируется блоками контроля загрузки электродвигателей приводов соот0
5
0
5
0
5
0
5
0
5
ветствующих механизмов: подъема (86), выполненным в виде двух, а привода тяги (87) и поворота (88)- в виде одного магнитных усилителей, работающих в релейном режиме, одни из входов которых подключены к источникам опорных напряжений LJon, LJoa ,
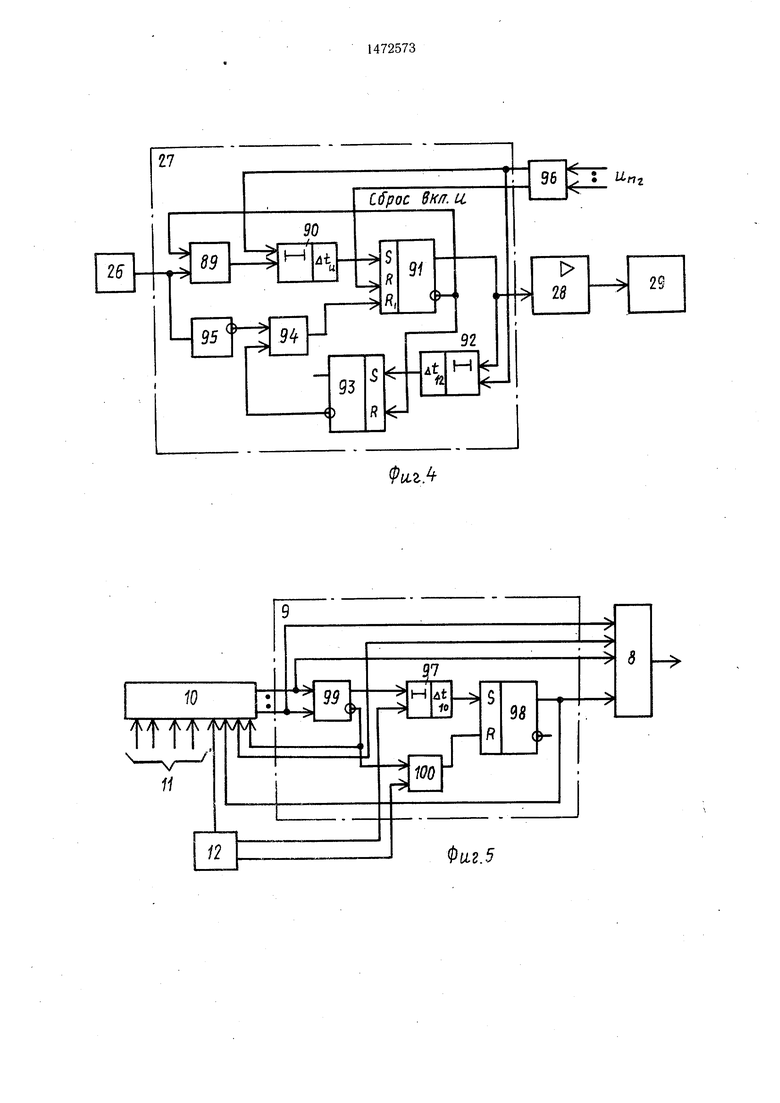
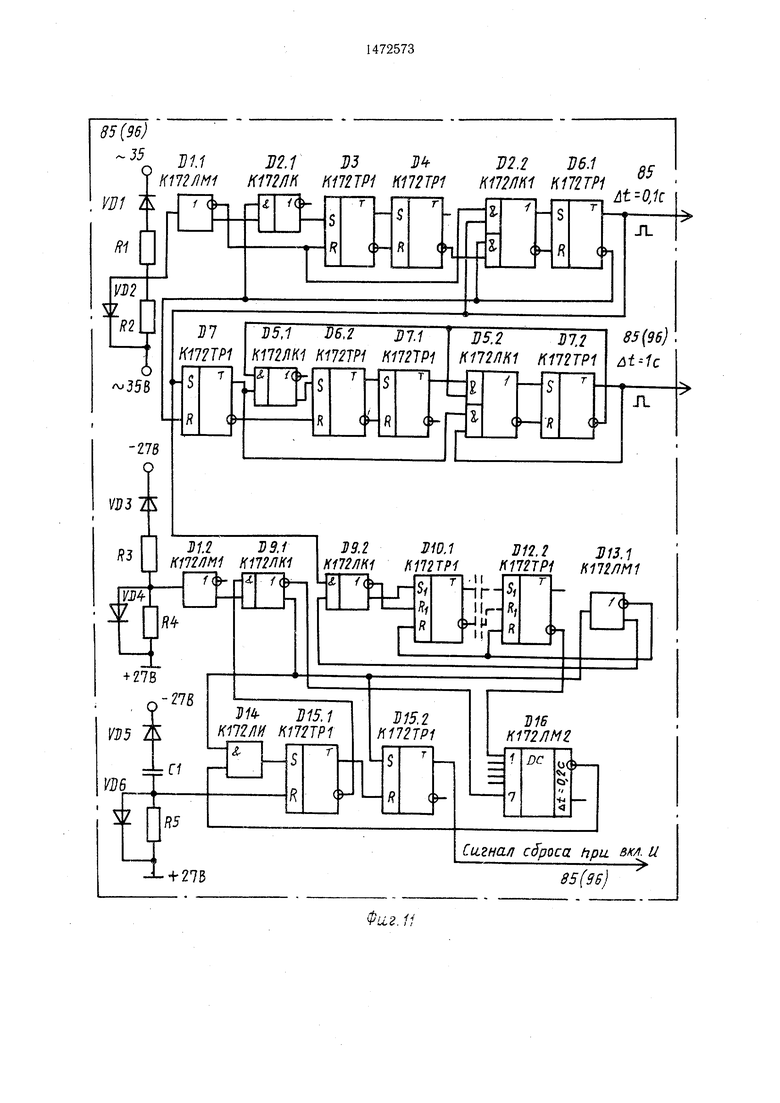
UoObДля фиксации сигнала на пункте контроля служит формирователь минимальной длительности приема и регистрации сигналов контроля (фиг. 4), который содержит схему 89, совпадения, элемент 90 задержки, элемент 91 памяти, элемент 92 задержки, элемент 93 памяти, схему 94 совпадения и инвертора 95, а также формирователь 96 сигналов. Для посылки сигнала контроля минимально необходимой длительности, обеспечивающей надежный прием его у диспетчера, на экскаваторе предусмотрен блок 9 задания минимальной длительности посылки сигнала контроля (фиг. 5), который содержит элемент 9,7 задержки, элемент 98 памяти, элемент ИЛИ 99 и элемент ИЛИ 100.
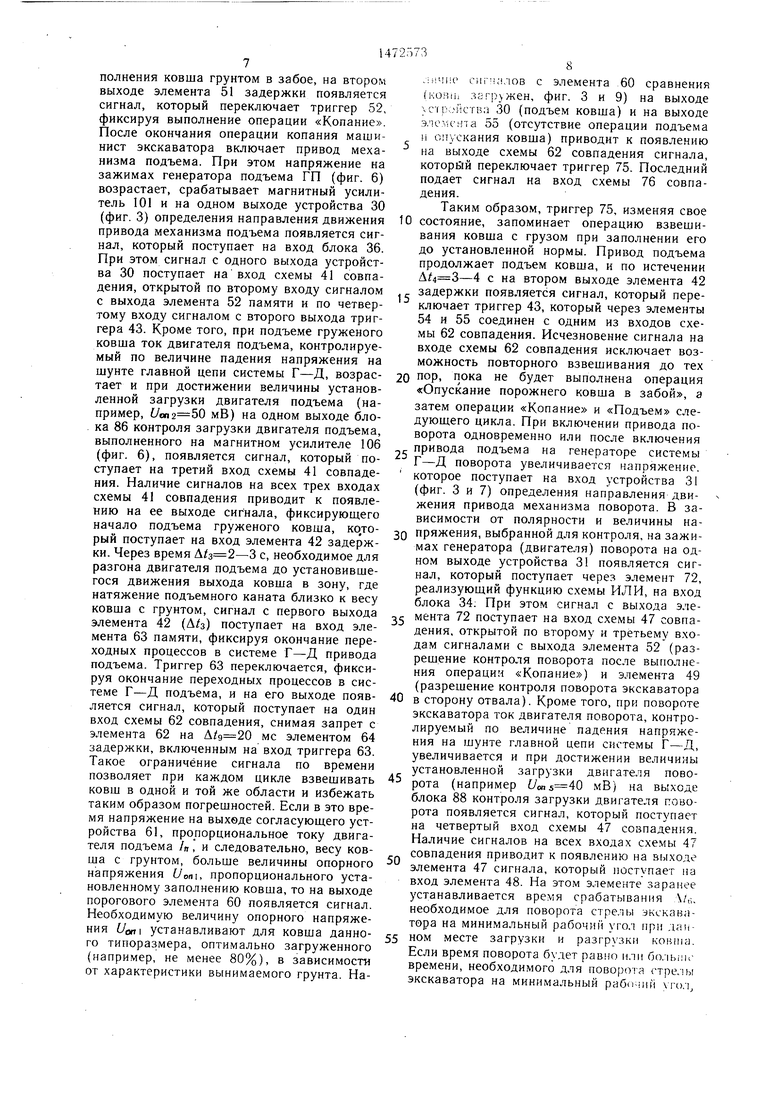
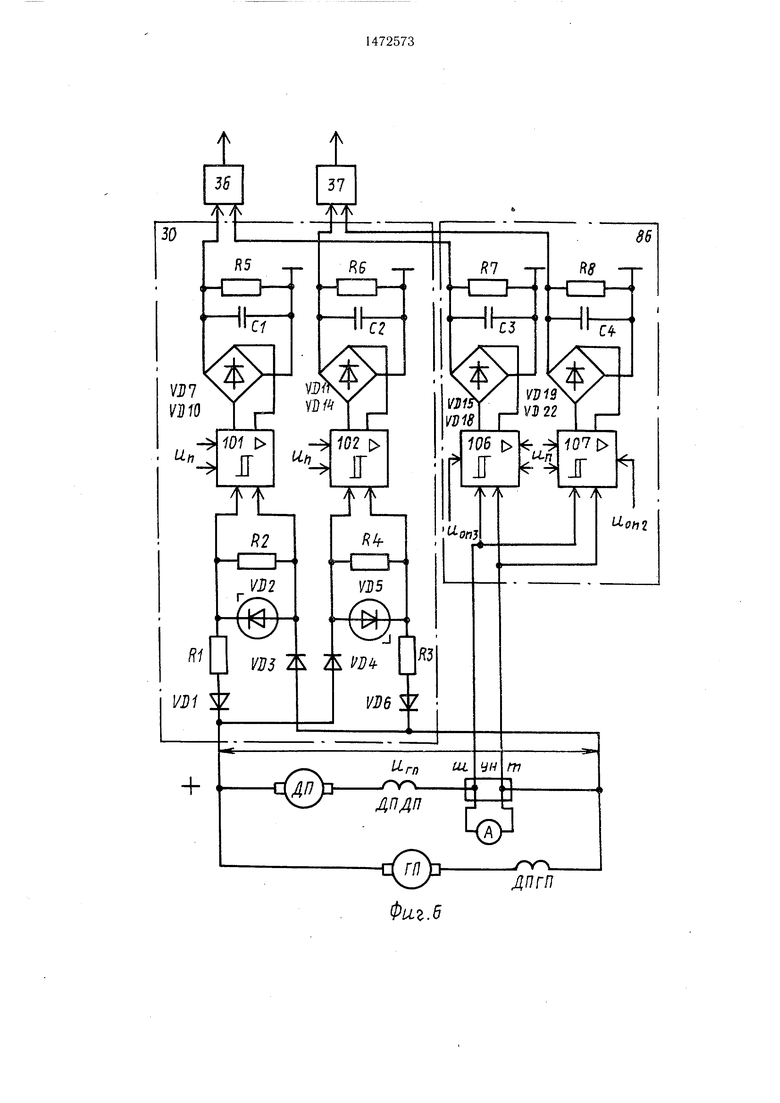
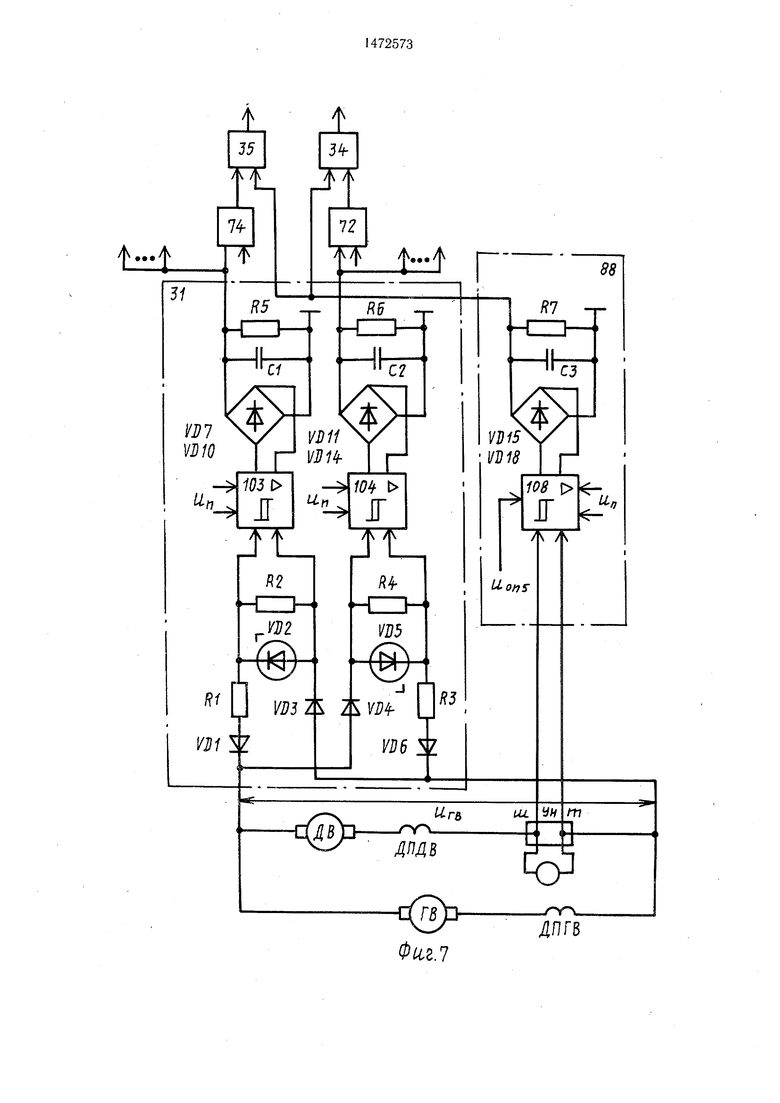
Для определения направления движения приводов механизмов подъема, тяги и поворота применены устройства (фиг. 3, 6-8), выполненные в виде двух однотипных магнитных усилителей 101 и 102 (привода механизма подъема) и 103 и 104 (привода механизма поворота), а также в виде одного магнитного усилителя 105 (привода механизма тяги).
Контроль операций технологического цикла шагающего экскаватора «Подъем груженого ковща в отвал, «Опускание порожнего ковща в забой, «Поворот экскаватора с груженым ковщом в отвал, «Поворот экскаватора с порожним ковщом в забой и операции «Копание выполнен с учетом загрузки приводных электродвигателей механизмов подъема, тяги, поворота, контролируемой блоками контроля загрузки двигателя подъема (фиг. 3), тяги и поворота, выполненными в виде двух однотипных работающих в релейном режиме магнитных усилителей 106 и 107 для двигателя механизма подъема (фиг. 6), а для привода поворота и тяги - в виде одного магнитного усилителя - 108 для поворота и 109 для тяги (фиг. 7 и 8).
Первая радиостанция обозначена позицией 110, вторая радиостанция 111 ч канальный усилитель 112.
Для задания необходимой длительности контроля выполнения операций единичного технологического цикла использованы элементы 39, 42, 45, 48 и 51 задержки (фиг. 3 и 10), выполненные в виде последовательно соединенных схемы совпадения, двоичного счетчика нмульсов, выполненного на RS- триггерах (учета секундных импульсов), с включенным на его выходе одним дешифратором, определяющим заданную длительность времени контроля для элементов 39,
45 и 48 задержки, а для элементов задержки 42 и 51 - с включенными на выход двоичного счетчика двух дешифраторов определения времени контроля.
Для получения учетных импульсов време- -ни 0,1 и 1 с для элементов 64, 83 и 39, 42, 45, 48, 51 задержки и формирования сигнала «Сброс при включении напряжения питания использованы формирователи 85 и 96 сигналов (фиг. 3, 4 и 11). Формирование счетных импульсов с интервалом следования 0,1 с осуществляется путем учета импульсов от источника переменного напряжения с частотой следования, равной 50 Гц (Д 0,02 с), формируемых на диоде и последовательно включенных двух резисторах, сред10
нист экскаватора, опустив ковш в грунт в выбранном месте забоя, включает привод тяги, заполняя таким образом ковш грунтом. Процесс копания осуществляется при отсутствии поворота экскаватора (отсутствие сигналов на выходах устройства 31 и блока 88), подъема ковша в отвал (отсутствие сигнала на одном выходе устройства 30) и включенном приводе механизма тяги (наличие сигнала на выходе устройства 32 и блока 87). В результате . на выходе элемента 65 появляется сигнал, который поступает на вход схемы 56 совпадения, на второй вход которой поступает сигнал с выхода элемента 55, так как операции «Подъем груженого ковша в отвал и «Опускание
30
няя точка которых через схемы ИЛИ, И 15 порожнего ковша в забой не выполнялись, подключена к делителю на 5, выполненному на двух последовательно соединенных RS- три ггерах, схеме 2И-ИЛИ, / 5-триггере, на выходе которого появляются импульсы с интервалом 0,1 с. Импульсы с интервалом 20 следования с формируются путем подключения на выход делителя на 5 делителя на 10, выполненного на / 5-триггере и последовательно с ним включенных схеме И и двух / 5-триггерах, схемы и RS- триггера, на выходе которого появляются импульсы с частотой следования 1 с.
Сигнал «Сброс (фиг. 11) формируется схемой, выполненной в виде последовательно соединенного датчика напряжения питания на последовательно coeд нeнныx диоде и двух последовательно соединенных резисторах, средняя точка которых соединена со счетной схемой, формирующей сигнал «Сброс.
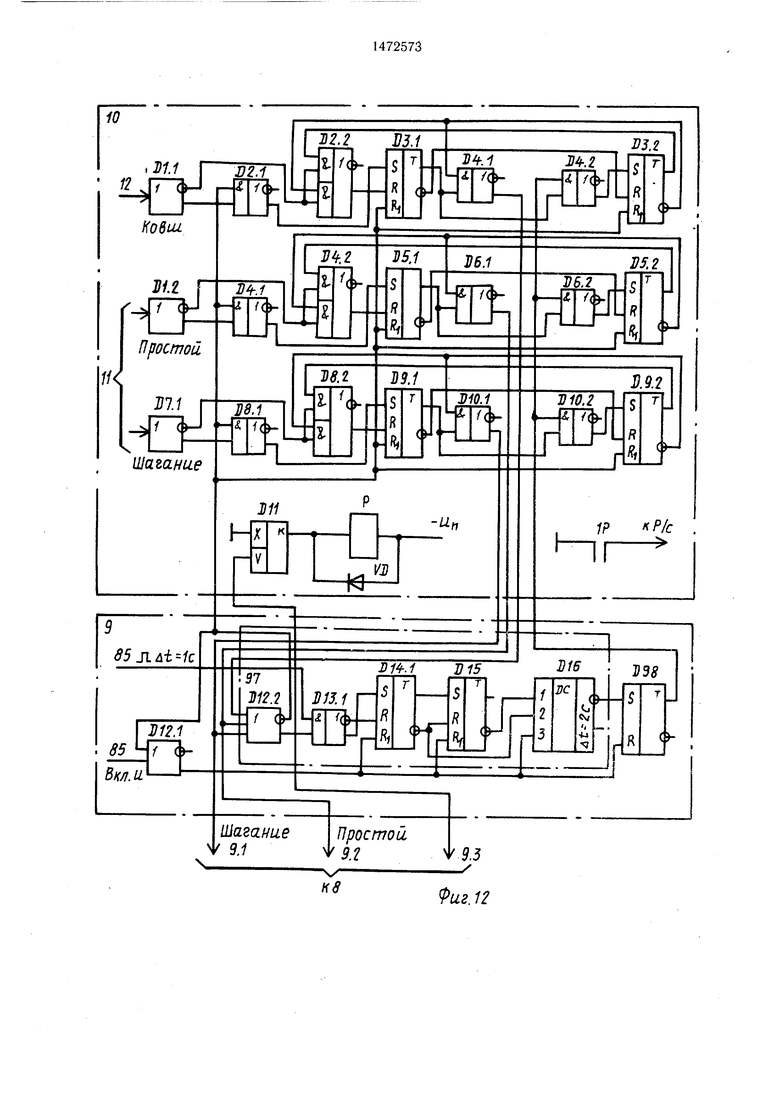
Для включения радиостанции при появлении сигналов контроля служит коммутатор 10 (фиг. 1 и 12), выполненный в виде 35 трех однотипных схем, на вход каждой из которых подаются сигналы «Ковш, «Простой, «Шагание, формируемые счетчиком датчиком 12 учета производительности и датчиками 11 непрерывной информации.
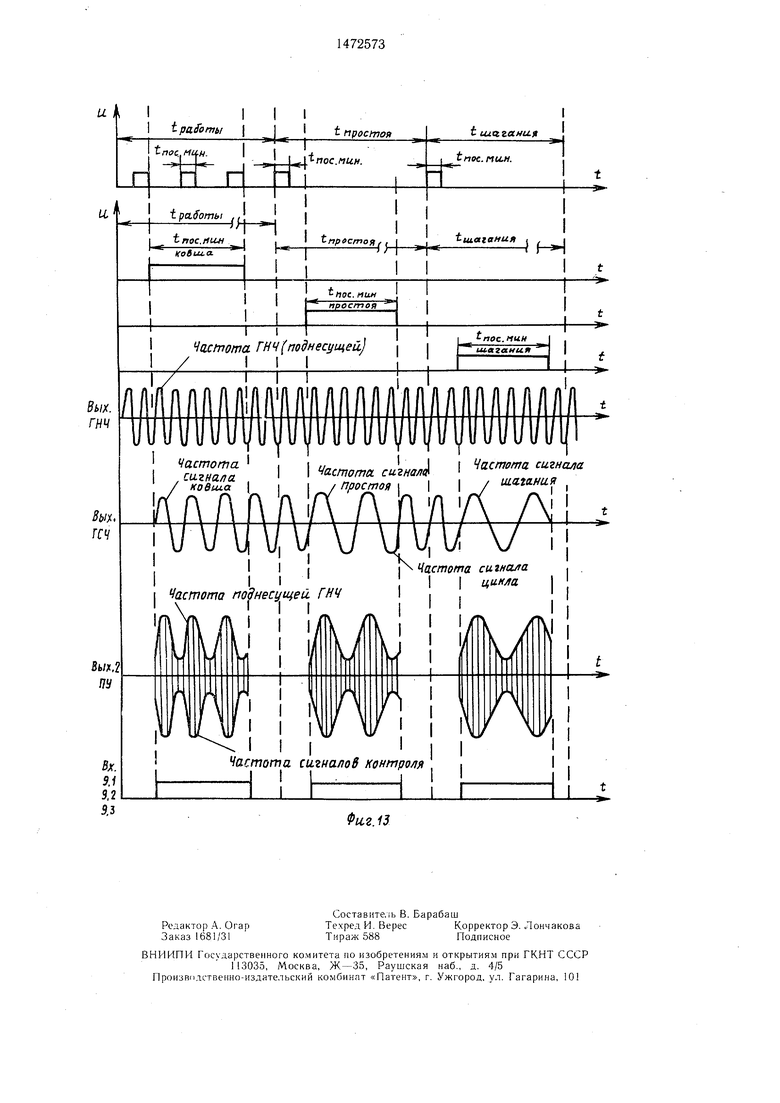
Для кодирования сигналов контроля используется шифратор 8 (фиг. 1), причем датчик 12 учета производительности на экскаваторе и датчики 11-информации формируют сигналы контроля «Работа, определяемый по сигналу «Ковш, «Простой и «Шагание в последовательности, приведенной на фиг. 13, где также показаны длительность посылки, форма и вид закодированных сигналов «Ковш, «Простой и «Шагание.
а на третий вход поступает сигнал с выхода элемента 59, так как операция «Поворот экскаватора с груженым коЕ1ШОм в отвал и «Поворот с порожним ковшом в забой не выполнялись. На выходе схемы 56 совпадения появляется сигнал, который поступает на вход блока 33 контроля операции «Копание. При включении привода тяги (операция «Копание) начинает работать датчик 12 учета производительности на экс25 каваторе (фиг. 1). Сигнал от привода тяги (напряжение генератора тяги) поступает на вход устройства 32 (фиг. 3) определения направления движения привода механизма тяги. При достижении напряжением на зажимах генератора тяги величины, выбранной для контроля, на выходе магнитного усилителя (устройство -32) появляется сигнал, который поступает на вход блока 33 контроля операции «Копание. При этом сигнал с выхода устройства 32 поступает на один вход схемы 50 совпадения. Кроме того, при заполнении ковша грунтом ток двигателя тяги, контролируемый по величине падения напряжения на штунте главной цепи системы Г-Д, возрастает и при достижении величины установленной загрузки двигателя тяги (например, ( мВ), на выходе блока 87 контроля загрузки двигателя, выполненного на магнитном усилителе 109, появляется сигнал, который поступает на второй вход схемы 50 совпадения, на третий вход которой поступает сигнал с выхода элемента 56. Наличие сигналов на всех входах схемы 50 совпадения приводит к появлению на ее выходе сигнала, который поступает на вход элемента 51 задержки. Через время ,5 с после начала операции «Копание на его первом выходе появ.50 ляется сигнал сброса схемы датчика 12 учета производительности на экскаваторе в исходное состояние длительностью ,2 с, формируемый триггером 82, элементом 83 задержки, триггером 84 и схемой 81 совпадения. Этот сигнал через элемент 80 воззра40
45
Устройство работает следующим образом.
При включении напряжения питания формирователя 85 и 96 (фиг. 3, 4 и II) формируют сигнал «Сброс, который через элемент
.50 ляется сигнал сброса схемы датчика 12 учета производительности на экскаваторе в исходное состояние длительностью ,2 с, формируемый триггером 82, элементом 83 задержки, триггером 84 и схемой 81 совпадения. Этот сигнал через элемент 80 воззра80 устанавливает элементы 40,43,46,49,52, щает в исходное состояние элементы 40, 43, 63, 66, 82, 84 и 91 (фиг. 4), 98 (фиг. 5)46, 49, 52, 63, 66 и 75 памяти. Через время
памяти в состояние начала контроля. Маши- с, минимально необходимое для за
нист экскаватора, опустив ковш в грунт в выбранном месте забоя, включает привод тяги, заполняя таким образом ковш грунтом. Процесс копания осуществляется при отсутствии поворота экскаватора (отсутствие сигналов на выходах устройства 31 и блока 88), подъема ковша в отвал (отсутствие сигнала на одном выходе устройства 30) и включенном приводе механизма тяги (наличие сигнала на выходе устройства 32 и блока 87). В результате . на выходе элемента 65 появляется сигнал, который поступает на вход схемы 56 совпадения, на второй вход которой поступает сигнал с выхода элемента 55, так как операции «Подъем груженого ковша в отвал и «Опускание
порожнего ковша в забой не выполнялись,
порожнего ковша в забой не выполнялись,
а на третий вход поступает сигнал с выхода элемента 59, так как операция «Поворот экскаватора с груженым коЕ1ШОм в отвал и «Поворот с порожним ковшом в забой не выполнялись. На выходе схемы 56 совпадения появляется сигнал, который поступает на вход блока 33 контроля операции «Копание. При включении привода тяги (операция «Копание) начинает работать датчик 12 учета производительности на экскаваторе (фиг. 1). Сигнал от привода тяги (напряжение генератора тяги) поступает на вход устройства 32 (фиг. 3) определения направления движения привода механизма тяги. При достижении напряжением на зажимах генератора тяги величины, выбранной для контроля, на выходе магнитного усилителя (устройство -32) появляется сигнал, который поступает на вход блока 33 контроля операции «Копание. При этом сигнал с выхода устройства 32 поступает на один вход схемы 50 совпадения. Кроме того, при заполнении ковша грунтом ток двигателя тяги, контролируемый по величине падения напряжения на штунте главной цепи системы Г-Д, возрастает и при достижении величины установленной загрузки двигателя тяги (например, ( мВ), на выходе блока 87 контроля загрузки двигателя, выполненного на магнитном усилителе 109, появляется сигнал, который поступает на второй вход схемы 50 совпадения, на третий вход которой поступает сигнал с выхода элемента 56. Наличие сигналов на всех входах схемы 50 совпадения приводит к появлению на ее выходе сигнала, который поступает на вход элемента 51 задержки. Через время ,5 с после начала операции «Копание на его первом выходе появляется сигнал сброса схемы датчика 12 учета производительности на экскаваторе в исходное состояние длительностью ,2 с, формируемый триггером 82, элементом 83 задержки, триггером 84 и схемой 81 совпадения. Этот сигнал через элемент 80 воззра
щает в исходное состояние элементы 40, 43, 46, 49, 52, 63, 66 и 75 памяти. Через время
7
полнения ковша грунтом в забое, на втором выходе элемента 51 задержки появляется сигнал, который переключает триггер 52 фиксируя выполнение операции «Копание После окончания операции копания машинист экскаватора включает привод механизма подъема. При этом напряжение на зажимах генератора подъема ГП (фиг. 6) возрастает, срабатывает магнитный усилитель 101 и на одном выходе устройства 30 (фиг. 3) определения направления движения привода механизма подъема появляется сигнал, который поступает на вход блока 36. При этом сигнал с одного выхода устройства 30 поступает на вход схемы 41 совпадения, открытой по второму входу сигналом с выхода элемента 52 памяти и по четвертому входу сигналом с второго выхода триггера 43. Кроме того, при подъеме груженого ковша ток двигателя подъема, контролируемый по величине падения напряжения на шунте главной цепи системы Г-Д, возрастает и при достижении величины установленной загрузки двигателя подъема (например, f/on2 50 мВ) на одном выходе блока 86 контроля загрузки двигателя подъема, выполненного на магнитном усилителе 106 (фиг. 6), появляется сигнал, который поступает на третий вход схемы 41 совпадения. Наличие сигналов на всех трех входах схемы 41 совпадения приводит к появлению на ее выходе сигнала, фиксирующего начало подъема груженого ковша, который поступает на вход элемента 42 задержки. Через время с, необходимое для разгона двигателя подъема до установившегося движения выхода ковша в зону, где натяжение подъемного каната близко к весу ковша с грунтом, сигнал с первого выхода элемента 42 (Д/з) поступает на вход элемента 63 памяти, фиксируя окончание переходных процессов в системе Г-Д привода подъема. Триггер 63 переключается, фиксируя окончание переходных процессов в системе Г-Д подъема, и на его выходе появляется сигнал, который поступает на один вход схемы 62 совпадения, снимая запрет с элемента 62 на мс элементом 64 задержки, включенным на вход триггера 63. Такое ограничение сигнала по времени позволяет при каждом цикле взвешивать ковш в одной и той же области и избежать таким образом погрешностей. Если в это вре- мя напряжекие на выходе согласующего устройства 61, пропорциональное току двигателя подъема In, и следовательно, весу ковша с грунтом, больше величины опорного напряжения Uon, пропорционального установленному заполнению ковша, то на выходе порогового элемента 60 появляется сигнал. Необходимую величину опорного напряжения f/ofii устанавливают для ковша данного типоразмера, оптимально загруженного (например, не менее 80%), в зависимости от характеристики вынимаемого грунта. На
10
15
20
25
30
35
40
5
0
5
8
.:г.ч1;е сигчллов с элемента .60 сравнения (KOHih ла.гружен, фиг. 3 и 9) на выходе с-|р.;;йства 30 (подъем ковша) и на выходе эломснта 55 (отсутствие операции подъема и опускания ковша) приводит к появлению на выходе схемы 62 совпадения сигнала, которйй переключает триггер 75. Последний подает сигнал на вход схемы 76 совпадения.
Таким образом, триггер 75, изменяя свое состояние, запоминает операцию взвешивания ковша с грузом при заполнении его до установленной нормы. Привод подъема продолжает подъем ковша, и по истечении с на втором выходе элемента 42 задержки появляется сигнал, который переключает триггер 43, который через элементы 54 и 55 соединен с одним из входов схемы 62 совпадения. Исчезновение сигнала на входе схемы 62 совпадения исключает возможность повторного взвешивания до тех пор, пока не будет выполнена операция «Опускание порожнего ковша в забой, а затем операции «Копание и «Подъем следующего цикла. При включении привода поворота одновременно или после включения привода подъема на генераторе системы Г-Д поворота увеличивается напряжение которое поступает на вход устройства 31 (фиг. 3 и 7) определения направления движения привода механизма поворота. В зависимости от полярности и величины напряжения, выбранной для контроля, на зажимах генератора (двигателя) поворота на одном выходе устройства 31 появляется сигнал, который поступает через элемент 72, реализующий функцию схемы ИЛИ, на вход блока 34; При этом сигнал с выхода элемента 72 поступает на вход схемы 47 совпадения, открытой по второму и третьему входам сигналами с выхода элемента 52(разрешение контроля поворота после выполнения операции «Копание) и элемента 49 (разрешение контроля поворота экскаватора в сторону отвала). Кроме того, при повороте экскаватора ток двигателя поворота, контролируемый по величине падения напряжения на шунте главной цепи системы Г-Д, увеличивается и при достижении величины установленной загрузки двигателя поворота (например f/on5 40 мВ) на выходе блока 88 контроля загрузки двигателя поворота появляется сигнал, который поступает на четвертый вход схемы 47 совпадения. Наличие сигналов на всех входах схемы 47 совпадения приводит к появлению на выходе элемента 47 сигнала, который поступает на вход элемента 48. На этом элементе заранее устанавливается время срабатывания Л/,;, необходимое для поворота стре.ль, экскаватора на минимальный рабочий угол при данном месте загрузки и разгрузки ковша. Если время поворота будет равно или бо.пыпг времени, необходимого для поворота стрелы экскаватора на минимальный рабочий vro i
то с выхода элемента 48 сигнал поступает на вход триггера 49, который срабатывает, фиксируя выполнение операции «Поворот экскаватора с груженым ковшом в сторону отвала на рабочий угол. Сигнал с выхода элемента 49 через схему ИЛИ 68 поступает на второй вход схемы 76 совпадения. Наличие сигналов на обоих входах схемы 76 свидетельствует о том, что ковш заполнен, поднят и перенесен на рабочий угол. На выходе элемента 76 появляется сигнал, который через усилитель 77 включает счетчик 78 учета ковшей и сигнальную лампу 79, разме- ш,енные на экскаваторе, для представления данных машинисту экскаватора с целью са10
тивным фильтром 19 звуковых частот и подается в телефонный канал радиостанции. Закодированные сигналы контроля, представляющие собой амплитудно-модулиро- ванные колебания поднесущей субтональной частоты (фиг. 14), с помощью полосового фильтра 20 отделяются от общего сигнала и подаются на груповой резонансный усилитель 21, нагруженный на групповой амплитудный детектор 22, выделяющий низкие частоты, которые являются первичными сигналами контроля. Напряжение низких частот подается на вход канальных усилителей 112, количество которых соответствует количеству контролируемых показатемоконтроля своей работы и поступает на ком- лей работы экскаватора.
мутатор 10 (фиг. 1 и 12). Кроме того, в процессе работы экскаватора датчики 11 информации, установленные на каждом контролируемом механизме и .включенные в их электрические цепи, вырабатывают сигналы, поступающие в коммутатор 10. Сигналы датчиков II информации и счетчика датчика 12 учета производительности на экскаваторе через коммутатор 10 (фиг. 1 и 12) и блок 9 задания минимальной длительности посылки сигналов контроля (фиг. 1 и 5) управляют работой шифратора 8 (фиг. 1).
Минимальная длительность посылки сигнала контроля задается следующим образом. Сигнал с выхода коммутатора 10 поступает на вход схемы ИЛИ 99 и на вход шифратора 8 (фиг. 5). При этом на выходе элемента 99 появляется сигнал, который включает шифратор 8.
Кроме того, сигнал с выхода схемы ИЛИ 99 поступает на вход схемы элеменВ канальных усилителях при помощи фильтров 23 выделяется сигнал, соответствующий только одному контролируемому показателю работы (например, «Ковш), затем этот сигнал усиливается усилителями
20 24 и 25, детектируется диодным детектором 26 и через формирователь 27 минимальной длительности приема и регистрации поступает на вход усилителя 28 сигналов, который включает регистрирующее устройство 29. Прием и регистрация сигналов контроля у диспетчера происходит следующим образом. Сигнал с детектора 26 поступает на один вход схемы 89 совпадения (фиг. 4), открытой по второму входу сигналом с второго выхода триггера 91. На выходе эле30 мента 89 появляется сигнал, который поступает на вход элемента 90 задержки на появление сигнала. Величина временной задержки выбирается в пределах ,2 0,5 с для того, чтобы обеспечить надежный прием передаваемого сигнала у дис25
та 97 задержки на появление сигнала. По 35 петчера и исключить ложное срабатывание
истечении заданной минимальной длительности А/10, необходимой для надежного приема сигнала контроля, на выходе элемента 97 задержки появляется сигнал, который через триггер 98 включает шифратор 8.
регистрирующего устройства при приходе сигнала помехи, что также повышает точность работы устройства. По истечении задержки сигнала на выходе элемента 90 появляется сигнал, который поступает на перСигналы, закодированные в шифраторе 8 40 вый вход триггера 91. Триггер 91 сраба(фиг. 13), поступают на вход модулятора 2 радиостанции 111. Параллельно на вход частотного модулятора может подаваться сигнал телефонного канала, полоса пропускания которого ограничивается сверху фильтывает, сигнал на его втором выходе исчезает, закрывая схему 89 совпадения по второму входу и отключая элемент 90, а на первом выходе триггера 91 появляется сигнал, который поступает на вход усилитетром 7 для ослабления влияния телефонно- ля 28 сигналов, который включает регистго канала на канал сигналов контроля. Закодированные сигналы усиливаются в радиостанции 110 и обычны.м образом излучаются при помощи антенны. На диспетчерском
рирующее устройство 29, и на вход второго элемента 92 задержки на появление сигнала, выходной сигнал которого поступает на первый вход второго элемента 93 памяти.
пункте сигналы принимаются обычным об-который срабатывает, и на его первом выхоразом другой радиостанцией такого же типа, входящей в приемную часть устройства (фиг. 2). Поступающие сигналы проходят обычный тракт приемника радиостанции и де- модулируются при помощи дискриминатора 14, нагруженного на усилитель 15. На выходе усилителя получается суммарный сигнал - телефонный и сигналы контроля. Телефонный сигнал отфильтровывается акде появляется сигнал, поступающий на один вход схемы 94 совпадения, на второй вход которой поступает сигнал с инвертора 95, вход которого соединен с выходом детектора 26 сигналов. Наличие сигналов на обоих 55 входах схемы 94 совпадения свидетельствует о том, что сигнал контроля принят и регистрирующим устройством зарегистрирован. Выходной сигнал эле.мента 94 поступает
тивным фильтром 19 звуковых частот и подается в телефонный канал радиостанции. Закодированные сигналы контроля, представляющие собой амплитудно-модулиро- ванные колебания поднесущей субтональной частоты (фиг. 14), с помощью полосового фильтра 20 отделяются от общего сигнала и подаются на груповой резонансный усилитель 21, нагруженный на групповой амплитудный детектор 22, выделяющий низкие частоты, которые являются первичными сигналами контроля. Напряжение низких частот подается на вход канальных усилителей 112, количество которых соответствует количеству контролируемых показателей работы экскаватора.
лей работы экскаватора.
В канальных усилителях при помощи фильтров 23 выделяется сигнал, соответствующий только одному контролируемому показателю работы (например, «Ковш), затем этот сигнал усиливается усилителями
20 24 и 25, детектируется диодным детектором 26 и через формирователь 27 минимальной длительности приема и регистрации поступает на вход усилителя 28 сигналов, который включает регистрирующее устройство 29. Прием и регистрация сигналов контроля у диспетчера происходит следующим образом. Сигнал с детектора 26 поступает на один вход схемы 89 совпадения (фиг. 4), открытой по второму входу сигналом с второго выхода триггера 91. На выходе эле30 мента 89 появляется сигнал, который поступает на вход элемента 90 задержки на появление сигнала. Величина временной задержки выбирается в пределах ,2 0,5 с для того, чтобы обеспечить надежный прием передаваемого сигнала у дис25
35 петчера и исключить ложное срабатывание
регистрирующего устройства при приходе сигнала помехи, что также повышает точность работы устройства. По истечении задержки сигнала на выходе элемента 90 появляется сигнал, который поступает на первый вход триггера 91. Триггер 91 срабатывает, сигнал на его втором выходе исчезает, закрывая схему 89 совпадения по второму входу и отключая элемент 90, а на первом выходе триггера 91 появляется сигнал, который поступает на вход усилителя 28 сигналов, который включает регистля 28 сигналов, который включает регистрирующее устройство 29, и на вход второго элемента 92 задержки на появление сигнала, выходной сигнал которого поступает на первый вход второго элемента 93 памяти.
который срабатывает, и на его первом выходе появляется сигнал, поступающий на один вход схемы 94 совпадения, на второй вход которой поступает сигнал с инвертора 95, вход которого соединен с выходом детектора 26 сигналов. Наличие сигналов на обоих 55 входах схемы 94 совпадения свидетельствует о том, что сигнал контроля принят и регистрирующим устройством зарегистрирован. Выходной сигнал эле.мента 94 поступает
на второй вход триггера 91 и переключает его, отключая при этом сигналом с первого выхода усилителя 28 и регистрирующее устройство 29, а сигналом с второго выхода открывает схему 89 совпадения по второму входу и возвращает в исходное состояние элемент 93 памяти.
При включении напряжения питания установка триггера 91 в исходное состояние осуществляется подачей сигнала «Сброс с формирователя 96 сигналов на третий вход триггера 91. Кроме того, с формирователя 96 на входы элементов 90 и 92 задержки для их работы поступают секундные импульсы. Длительность включения A/i2 регистрирующего прибора 29 определяется его быстродействием и устанавливается с учетом надежной регистрации сигнала контроля.
Такой способ передачи, приема и регистрации сигналов контроля позволяет установить на передающей части устройства минимально необходимую длительность посьглки сигнала контроля, величина которой определяется инерционностью приемного устройства и длительностьью надежного приема сигналов, исключая при этом возможность срабатывания устройства при поступлении сигнала помехи, что позволяет увеличить точность отображения ковшей у диспетчера, путем исключения постоянной времени регистрирующего устройства 29 из приема сигнала контроля у диспетчера. В процессе передачи, приема и регистрации параметров контроля на экскаваторе и у диспетчера экскаватор продолжает выполнять технологический цикл. После подъема ковша на заданную высоту выгрузки и поворота на заданный рабочий угол осуществляется операция «Разгрузка ковша в отвал. При работе экскаватора операция «Разгрузка ковша может выполняться с остановкой привода поворота и без остановки, т. е. выгрузка может производиться при повороте экскаватора и отсыпке веерного отвала при работе на рабочий угол более 150°.
Фиксация операции «Разгрузка при работе с остановкой (реверсом привода поворота) экскаватора (фиг. 3) осуществляется элементом 66, на вход которого поступает сигнал с выхода схемы 67 совпадения, открытой по первому входу сигналом с выхода схемы ИЛИ 68, на вход которой поступают сигналы с выходов триггеров 49 и 46, фиксирующих соответственно поворот экскаватора в отвал и забой, а на второй вход схемы 67 совпадения поступает сигнал с выхода элемента 69, на вход которого поступает сигнал с выхода элемента 70, при отсутствии сигналов с выхода устройства 31 определения направления движения привода механизма поворота. Сигнал с выхода элемента 66 поступает на входы схем 71 и 73 совпадения, включенных соответственно между блоком 34 контроля операции «Поворот в отвал через элемент ИЛИ 72
0
0
и блоком 35 контроля операции «Поворот в забой через элемент ИЛИ 74 и выходами устройства 3. При выгрузке ковща экскаватора без остановки на отвале (без реверса привода поворота) фиксация операции «Разгрузка осуществляется также элементом 66, но только сигналом с выхода элемента 38, фиксирующего начало опускания порожнего ковща в забой после его выгрузки, который поступает через элемент ИЛИ 69 и схему 67 совпадения на вход триггера 66. После выгрузки ковша экскаватор поворачивается в сторону забоя. Контроль операции «Поворот в забой при остановке экскаватора на выгрузку осуще- 5 ствляется следующим образом. При повороте экскаватора на втором выходе устройства 31 определения направления движения привода механизма поворота появляется сигнал, который поступает на вход схемы 44 совпадения через схему ИЛИ 74. На выходе элемента 44, открытого по второму входу сигналом с триггера 52 (операция «Копание), сигналом с второго выхода триггера 46 и сигналом с выхода блока 88, появляется сигнал, который поступает на 5 вход элемента 45, и по истечении времен11 А/7 поворота стрелы экскаватора в забой на рабочий угол на его выходе появляется сигнал, фиксирующий выполнение операции «Поворот в забой, который поступает на вход схемы ИЛИ 68. Но так как на одном ее входе присутствует сигнал с выхода элемента 49 (поворот экскаватора в отвал), то состояние триггера 66 не изменяется, на его выходе есть сигнал. Кроме того, с выхода элемента 46 сигнал поступает на второй вход схемы 57 совпадения, открытой по первому входу сигналом с выхода элемента 49 (поворот в отвал). При этом на выходе схемы 57 появляетя сигнал, который фиксирует выполнение операции «Поворот в забой. Этот сигнал через элемент ИЛИ 59 поступает на один вход схемы 56 совпадения, подготавливая разрешение для контроля операции «Копание. Одновременно на втором выходе э,темента 46 сигнал исчезает, действие блока 35 контроля операции «Поворот экскаватора в забой блокируется путем снятия сигнала с первого входа схемы 44 совпадения. Появление сигнала на первом выходе триггера 46 свидетельствует о том, что поворот экскаватора в забой на заданный рабочий угол выполнен.
При работе экскаватора на угол 180° 0 и более, когда выгрузка ковша осуществляется без остановки экскаватора, с устройства 31 контроля направления движения сигнал снимается с одного и того же выхода («Поворот в отвал) и поступает на второй вход схемы 73 совпадения, закрытой по пер- 5 вому входу сигналом с выхода элемента 66. В процессе поворота экскаватора в забой начинает выполняться операция «Опускание порожнего ковша в забой и на втором выхо0
5
0
5
де устройства 30 появляется сигнал, который поступает на вход схемы 38 совпадения, открытой по второму, третьему и четвертому входам сигналами с выхода элементов 40 и 43 и первого выхода блока 86. На выходе элемента 38 появляется сигнал, который поступает на вход элемента 69, на выходе которого появляется сигнал, который поступает на второй вход схемы 67 совпадения, открытой по первому входу сигналом с выхода элемента 68. На выходе элемента 67 появляется сигнал, который переключает триггер 66, фиксируя операцию «Разгрузка в отвал. Сигнал с выхода элемента 66 поступает на вход схемы 73 совпадения и если поворот выполняется в ту же сторону, что и .на выгрузку, то на первом выходе устройства 31 присутствует сигнал, который через схему 73 совпадения и схему ИЛИ 74 поступает на вход блока 35 контроля операции «Поворот экскаватора в забой. При этом сигнал с выхода элемента 73 20 через элемент 74 и схему 44 совпадения, открытую по второму, третьему и четвертому входам сигналам с элементов 52, 46 и блока 88, поступает на вход элемента 45 задержки. По истечении выдержки времени Л/у, равной
На выходе элемента 38 появляется сигнал, который через элемент 39, определяющий необходимое время опускания ковша 3 забой в данных условиях , поступает . на вход триггера 40, фиксирующего выпол- пение операции опускания порожнего ковша. Сигнал с выхода элемента 49 поступает на второй вход второй схемы 54 совпадения, открытой по первому входу сигналом с элемента 43. Наличие обоих сигналов на вхо- 0 дах элемента 54 пр1иводит к появлению на его выходе сигнала, поступающего через элемент ИЛИ 55 на вход элемента 62, подготавливая его схему для контроля заполнения ковша при его подъеме в следующем цикле, а поступает на вход элемента 56, разрешая контроль операции «Копание после выполнения операций подъема груженого и опускание порожнего ковша. Кроме того, на втором выходе триггера 40 сигнал пропадает, запирая схему 38.
Если операции технологического цикла шагающего экскаватора «Поворот на выгрузку в отвал и «Поворот в забой (на заданные рабочие углы) и «Подъем груженого и опускание порожнего ковша выполнены, то на первый и третий входы эле30
времени поворота экскаватора на рабочий мента 56 поступают сигналы соответствен- угол в забой, на выходе элемента 45 за-но с элементов 55 и 59 и при отсутствии
держки появляется сигнал, который переключает триггер 46, фиксируя операцию «Поворот экскаватора в забой. Сигнал с выхода элемента 46 через вторую схему 57 совпадения, открытую по второму входу сигналом с выхода элемента 49 («Поворот в отвал), поступает на первый вход схемы 56 совпадения через элемент 59, реализующий функцию ИЛИ, разрешая контроль операции
«Копание после поворота экскаватора в; Копание, который поступает на вход блока
отвал и забой. Кроме того, сигнал на-втором33 контроля операции «Копание,
выходе элемента 46 пропадает и закрывается схема 44 совпадения, запрещая повторный
подъема ковша (второй выход устройства 30) и вращения экскаватора (отсутствие сигналов на первом и втором входах устройства 31) на выходе элемента 65 появляется сигнал, поступающий на второй вход схемы 56 совпадения. Наличие сигналов на трех входах схемы 56 совпадения при водит к появлению на выходе элемента 56 сигнала разрещения контроля операции
контроль поворота экскаватора в забой. Если при работе экскаватора поворот его
Этот сигнал поступает на один вход схемы 50 совпадения, второй вход которой соединен с выходом устройства 32, а третий - с выходом блока 87. При выполнении
будет осуществляться в противоположную 40 операции «Копание на выходе устройства 32
сторону, то на втором выходе устройства 31 появляется сигнал и схема работает аналогично описанному. Так осуществляется контроль операции «Поворот экскаватора в отвал и забой при выгрузке ковша в отвал
и блока 87 появляются сигналы, которые поступают на схему 50 совпадения, открытую по второму входу сигналом с элемента 56, который появляется после выполнения экскаватором операций «Подъем грус остановкой и без остановки экскаватора. 45 женого и опускание порожнего ковша,
«Поворот на выгрузку в отвал с груженым После выгрузки ковша машинист экскаватора продолжает выполнял,.:; технологический цикл, поворачивая стрелу экскаватора в
забой, опуская при этом в забой порожи в забой с порожним ковшом на заданный рабочий угол, что приводит к появлению на выходе элемента 50 сигнала, который поступает на элемент 51, который
ВИЙ ковш. При опускании ковша на втором в процессе операции копания формирует выходе устройства 30 появляется сигнал,через время ,5 с после начала операции «Копание сигнал «Сброс, который формируется элементами 82-84 и 8i и через элемент 80 возвращает в исходное состояние
который поступает на один вход блока 37 контроля операции «Опускание порожнего ковша в забой. Сигнал при этом подается
на схему 38 совпадения, на второй вход ко-55 элементы 40, 43, 45, 49, 52, 63, 66 и 75 памяти, торой поступает сигнал с выхода элемен-а также элемент 98 блока 9 (фиг. 5). та 40, а на третий - с выхОлТ.а элемен-После этого схема готова к учету слета 43, зафиксировавшего операцию «Подъемдующего цикла работы шагающего экска- груженого ковша в отвал.ватора.
На выходе элемента 38 появляется сигнал, который через элемент 39, определяющий необходимое время опускания ковша 3 забой в данных условиях , поступает на вход триггера 40, фиксирующего выпол- пение операции опускания порожнего ковша. Сигнал с выхода элемента 49 поступает на второй вход второй схемы 54 совпадения, открытой по первому входу сигналом с элемента 43. Наличие обоих сигналов на вхо- дах элемента 54 пр1иводит к появлению на его выходе сигнала, поступающего через элемент ИЛИ 55 на вход элемента 62, подготавливая его схему для контроля заполнения ковша при его подъеме в следующем цикле, а поступает на вход элемента 56, разрешая контроль операции «Копание после выполнения операций подъема груженого и опускание порожнего ковша. Кроме того, на втором выходе триггера 40 сигнал пропадает, запирая схему 38.
Если операции технологического цикла шагающего экскаватора «Поворот на выгрузку в отвал и «Поворот в забой (на заданные рабочие углы) и «Подъем груженого и опускание порожнего ковша выполнены, то на первый и третий входы элемента 56 поступают сигналы соответствен- но с элементов 55 и 59 и при отсутствии
мента 56 поступают сигналы соответствен- но с элементов 55 и 59 и при отсутствии
; Копание, который поступает на вход блока
подъема ковша (второй выход устройства 30) и вращения экскаватора (отсутствие сигналов на первом и втором входах устройства 31) на выходе элемента 65 появляется сигнал, поступающий на второй вход схемы 56 совпадения. Наличие сигналов на рех входах схемы 56 совпадения при водит к появлению на выходе элемента 56 сигнала разрещения контроля операции
33 контроля операции «Копание,
Этот сигнал поступает на один вход схемы 50 совпадения, второй вход которой соединен с выходом устройства 32, а третий - с выходом блока 87. При выполнении
операции «Копание на выходе устройства 32
и блока 87 появляются сигналы, которые поступают на схему 50 совпадения, открытую по второму входу сигналом с элемента 56, который появляется после выполнения экскаватором операций «Подъем груженого и опускание порожнего ковша,
Такая последовательность контроля операций технологического цикла работы шагающего экскаватора создает замкнутую систему их контроля, исключая возможность ложного счета датчиком учета производительности экскаватора, что повышает в целом точность всего устройства.
Применение радиотелеметрического устройства контроля и учета работы шагающего экскаватора повышает его производи- тельнос ть в среднем на 5% за счет сокращения времени непроизводительных работ и простоев.
Формула изобретения
10
ля и формирователи сигналов но чи(м канальных усилителей, выходы формирова телей сигналов соединены с другими входа ми канальных усилителей, одни выходы блока задания минимальной длительности посылки сигналов соединены с входами шифратора, а другие выходы соединены с другими входами коммутатора, другие выходы датчика учета производительности на экскаваторе соединены с одними входами блока задания минимальной длительности посылки сигналов контроля, выходы коммутатора соединены с другими входами блока задания минимальной длительности посылки сигналов.
20
2. Устройство по п. 1, отличающееся тем, 1. Радиотелеметрическое устройство конт- 15 что блок задания минимальной длительности роля и учета работы шагающего экска-посылки сигналов контроля содержит триггер, два элемента ИЛИ и элемент задержки, выход которого соединен с первым входом триггера, первый выход первого элемента ИЛИ соединен с первым входом элемента задержки, второй вход которого и первый вход второго элемента ИЛИ подключены к одним входам блока задания минимальной длительности посылки сигналов контроля, другие входы которого соединены с входами
повой резонансный усилитель и групповой 25 первого элемента ИЛИ и соединены вместе амплитудный детектор соединен с одними вхо- с выходом первого элемента ИЛИ и выходом дами канальных усилителей, датчики информации, датчик учета производительности на
ватора, содержащее первую радиостанцию, выход которой через первый фильтр соединен с первым входом первой радиостанции, шифратор, выход которого соединен с вторым входом первой радиостанции, вторую радиостанцию, первый выход которой через второй фильтр соединен с входом второй радиостанции, выход которой через последовательно соединенные третий фильтр, груптриггера, с одними выходами блока минимальной длительности посылки сигналов контроля, второй выход первого элемента ИЛИ соединен с вторым входом второго
экскаваторе, один выход которого соединен с управляющим входом коммутатора, к одним
триггера, с одними выходами блока минимальной длительности посылки сигналов контроля, второй выход первого элемента ИЛИ соединен с вторым входом второго
входам которого подключены датчики инфор- 30 элемента ИЛИ, выход которого соединен
мации, отличающееся тем, что, с целью повыщения точности учета производительности работы щагающего экскаватора, в устройство введены блок задания минимальной длительности посылки сигналов контрос вторым входом триггера, выход которого вместе с первым и вторым входами первого элемента ИЛИ соединен с другими выходами блока задания минимальной длительности посылки сигналов контроля.
ля и формирователи сигналов но чи(м канальных усилителей, выходы формирова телей сигналов соединены с другими входа ми канальных усилителей, одни выходы блока задания минимальной длительности посылки сигналов соединены с входами шифратора, а другие выходы соединены с другими входами коммутатора, другие выходы датчика учета производительности на экскаваторе соединены с одними входами блока задания минимальной длительности посылки сигналов контроля, выходы коммутатора соединены с другими входами блока задания минимальной длительности посылки сигналов.
20
первого элемента ИЛИ и соединены вместе с выходом первого элемента ИЛИ и выходом
триггера, с одними выходами блока минимальной длительности посылки сигналов контроля, второй выход первого элемента ИЛИ соединен с вторым входом второго
элемента ИЛИ, выход которого соединен
с вторым входом триггера, выход которого вместе с первым и вторым входами первого элемента ИЛИ соединен с другими выходами блока задания минимальной длительности посылки сигналов контроля.
V
15
u
/7
/
/5
г
I
L
I
/
1
l1
16 I

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| УСТРОЙСТВО для КОНТРОЛЯ и УЧЕТА СУЛ1МАРНОГО УГЛА ПОВОРОТА ПЛАТФОРМЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1971 |
|
SU290088A1 |
| Устройство для управления драглайном | 1977 |
|
SU682607A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для определения производительности экскаватора | 1977 |
|
SU674058A2 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
| Устройство для управления процессом копания карьерного экскаватора | 1986 |
|
SU1425284A2 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |


Изобретение относится к области горнодобывающей промышленности и позволяет осуществлять автоматический контроль и учет работы шагающего экскаватора (ШЭ). Цель изобретения - повышение точности учета производительности работы ШЭ. Для этого радиостанция (РС) передающей части устройства снабжена блоком 9 задания длительности посылки сигналов (ДПС) контроля, а РС приемной части - формирователями сигналов, подключенными к канальным усилителям. На каждом контролируемом механизме ШЭ установлены датчики учета производительности 12 и информации 11. Сигналы с датчиков 11 и 12 через коммутатор 10 и блок 9 поступают на вход шифратора 8. Закодированные сигналы поступают на вход передающей РС, которая содержит передатчик 1 с частотным модулятором 2, супергетеродинный приемник 3 с дискриминатором 4, согласованный с помощью эмиттерного повторителя 5 с выходным низкочастотным усилителем, коммутатор 6 управления РС с микрофонной трубкой. Для ограничения ширины полосы телефонного канала служит фильтр 7 звуковых частот. Радиосигналы контроля принимаются приемной РС на диспетчерском пункте. Там они выделяются с помощью фильтров, группового резонансного усилителя и группового амплитудного детектора и поступают на входы канальных усилителей. Их количество соответствует числу контролируемых показателей работы ШЭ. Блок 9 выполнен на логических элементах и содержит элемент задержки. Блок 9 позволяет установить на РС передающей части устройства минимально необходимую ДПС. Величина ДПС определяется инерционностью приемной части и длительностью надежного приема сигналов. При этом исключается срабатывание устройства при поступлении сигнала помехи. 1 з.п. ф-лы, 13 ил.
/ f f
Фиг. 2
23
//Л
V
24
4
25
jL
25
28
M/
27
Фиг.З
10
99
/к/к /tCytv /
ff
Фаг.
97
9S
R
Фа2.5
VS13 V)22 Т ,-I
ЛПГП
Фиг.5
i
ф...ф
т
DW
VJ)i1 /Dl
Ш5 18
Фиг.
ЛЛГВ
r
к шунту системы Подъема
Фи2.9
Вы)(од
МУ
к 62
37(35,3)
о т 85
39(5,8)
Фи.г. 10
U1.1 m.i )3 D кт/im Ki72/jn нттР1 НП2ТР1
Ш 2i
т
35В
W37S
V
УМ
Я4
.-27S
1)1 D15.1 кт/1И K172JP1
1)2.2 JJ6.1 К172ЛК1 K172TP1
65
-|Г
/О
d
6-1р иг
(Н
D15.2 К172ГР1
Т) 16
ктлмг
Сигнал при. вм. и
85(96)
Фи,2.11
s/
К8
иг. 12
и ;,
Фиг. 13
| Борисюк Н | |||
| И., Яворский В | |||
| А | |||
| Аппаратура автоматического непрерывного диспетчерского контроля и учета работы шагающих экскаваторов.-Вестник Киевского политехнического института | |||
| Горная электромеханика и автоматика | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Механический грохот | 1922 |
|
SU41A1 |
| Устройство для контроля работы машины циклического действия, например, шагающего эскаватора | 1968 |
|
SU307672A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
