Изобретение относится к области измерительной техники и может быть исиользовано для измерения угла поворота выходного вала различных устройств в системах коитроля и управления.
Известны датчики угла, содержащие вал, статор с расноложеиными на нем герконами, оси которых параллельиы оси вала, установленный на валу дисковый ротор и закрепленный на нем в рабочей п.чоскости герконов магнитный узел.
Недостатком извест1И11х датчико является невысокая точность измерения из-за разброса чувствительности срабатывания и отпускания герконов вследствие отклонения размеров контактных пластин и межкоитактного зазора от расчетных значений при их изготовлеини.
Предложенный датчик отличается от известного тем, что он снабжен установленным на 1,алу, ось которого коннентрична оси нервого, иторым дисковым ротором с закренленны.м на нем доно.чннтельным магннтным узлом, обран еиным к первому разноименным полюсом, н зубчатой передачей, связывагон ей валы роторов.
Указанное отличие иозволяет повысить точность нзмерення.
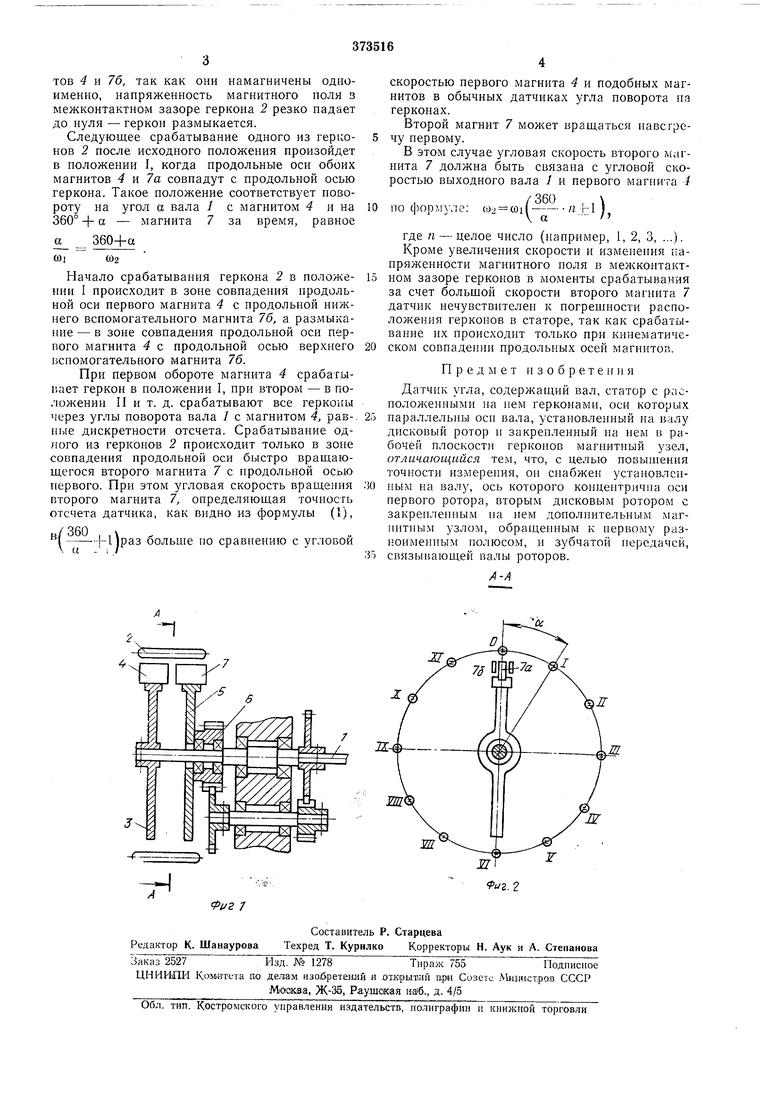
На фиг. 1 иоказан предлагаемый датчик, общий вид; на фиг. 2 - разрез по Л-А на фиг. 1.
Датчик содержит вал I, статор, по окружпости которого параллельно оси вала расположены герконы 2 с угловым шагом а, укрепленный на налу дисковый ротор 3 с закрепленным на нем магннтным узлом 4, второй дисковый ротор 5, соединенный с нервым через зубчатую передачу 6, на котором закреплен дополнительный магнитный узел 7, выполненный в виде основного магнита 7а и установленных с двух сторон с зазором параллельно ему вспомогательных магнитов 76. Параметры и.х выбираются таким образом, чтобы получить круToii фронт нарастания н убывания нанряженности магнитного поля.
Магниты 4 и 7а устанавливаются в датчике , что разноименные полюса их находятся в зоне нерекрытня контактных пластнн герконов 2 и п исходном состоянии продольные оси магнитов -/ н /о совпадают с продольной осью геркопа.
Датчик работает следующнм образом.
Прн повороте нсследуемого вала, вращаюН1,егося со скоростью (Oi на некоторый угол а, оба ротора понорачнваются в ту же сторону, но с разнымн угловымн скоростямн: ротор 3 с уг.по.юй скоростью coi н ротор 5 с
)
(1)
где ;. - дискретность отсчета датчика. 30 3 зоне совиадеиия продольных осей Marini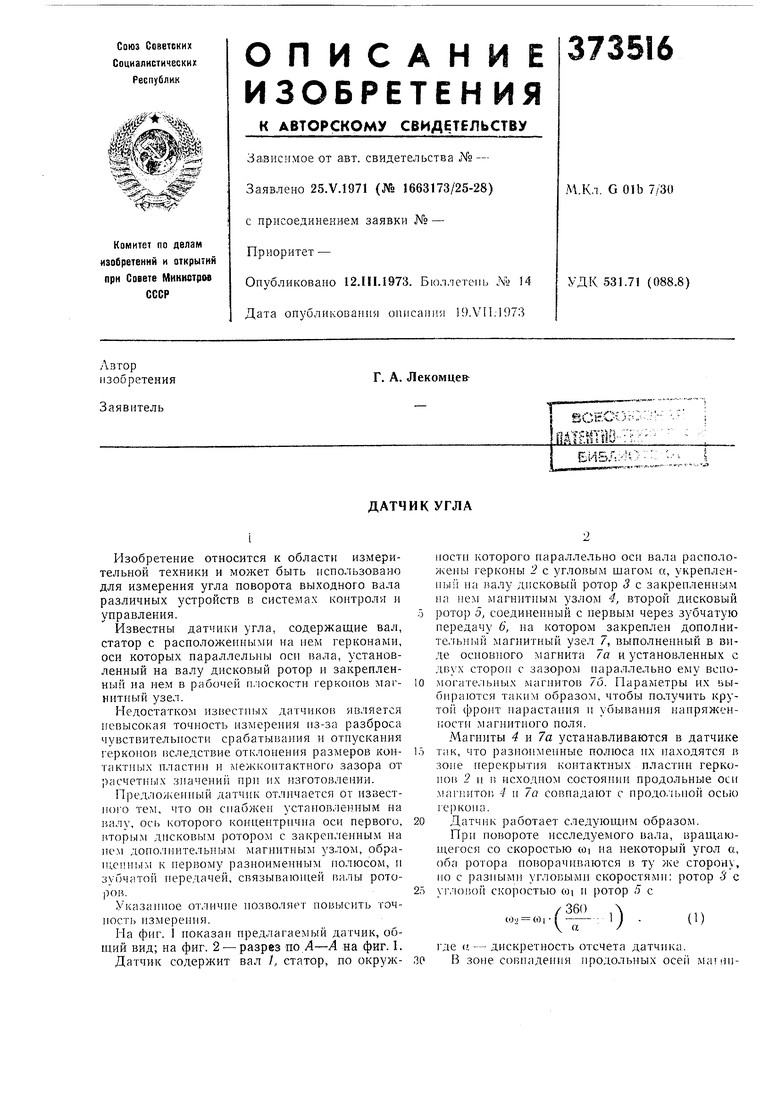
| название | год | авторы | номер документа |
|---|---|---|---|
| КОММУТАТОР НА ГЕРКОНАХ | 1973 |
|
SU393774A1 |
| Датчик угла | 1977 |
|
SU632896A2 |
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОЙ МАГНИТНОЙ ДЕФЕКТОСКОПИИ СТЕНОК СТАЛЬНЫХ ТРУБОПРОВОДОВ | 1993 |
|
RU2102737C1 |
| Датчик угла | 1985 |
|
SU1250845A1 |
| Тахометр постоянного тока | 1989 |
|
SU1704094A1 |
| Устройство для преобразования угловой скорости электродвигателя | 1990 |
|
SU1704095A1 |
| ТОРЦЕВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ВЕТОХИНА (ТЭМВ) | 1993 |
|
RU2041546C1 |
| Устройство для экспериментальных исследований гидравлических движителей | 1988 |
|
SU1615589A1 |
| Поляризованный электромеханический преобразователь для электрочасов | 1984 |
|
SU1277061A1 |
| Переключатель | 1990 |
|
SU1723598A1 |
