1
Изобретение относится к области автоматического уравновешивания роторов в процессе эксплуатации, когда начальное уравновешивание, достигнутое при изготовлении машины, может нарушиться в процессе работы из-за износа и смещения элементов ротора и других причин или обусловлено самим рабочим процессом.
Известные автоматические уравновешивающие устройства, обеспечивают динамическую балансировку валов с применением свободно движущихся балансировочных масс.
Однако уравновешивание с их помощью обеспечивается только на скоростях вращения, выше критической.
Предложенное устройство содержит блок динамической балансировки вала с балансировочными грузами и отличается от известных тем, что, с целью расширения диапазона уравновешивания, блок динамической балансировки содержит следящую систему установки балансировочных грузов в плоскости неуравновешенности, выполненную в виде чувствительного элемента, например сегментного маятника, расположенного в плоскости, перпендикулярной оси вала, двух источников света и фоторезисторов, расположенных симметрично по обе стороны оси вала в плоскости чувствительного элемента, и мостовой схемы, в плечи которой включены фоторезисторы, а в диагональ - поляризованное реле, соединенное с приводом, установленным на оси вала, и жестко связанную с приводом следящую систему компенсации неуравновещенности, выполненную в виде чувствительного элемента определения направления компенсации, соединенных с ним двигателей, кинематически связанных с балансировочными грузами. Устройство отличается также тем,
чем в нем установлен центробежный регулятор с контактами, размещенный вдоль оси вала, причем контакты регулятора соединены через чувствительный элемент определения направления компенсации с двигателями.
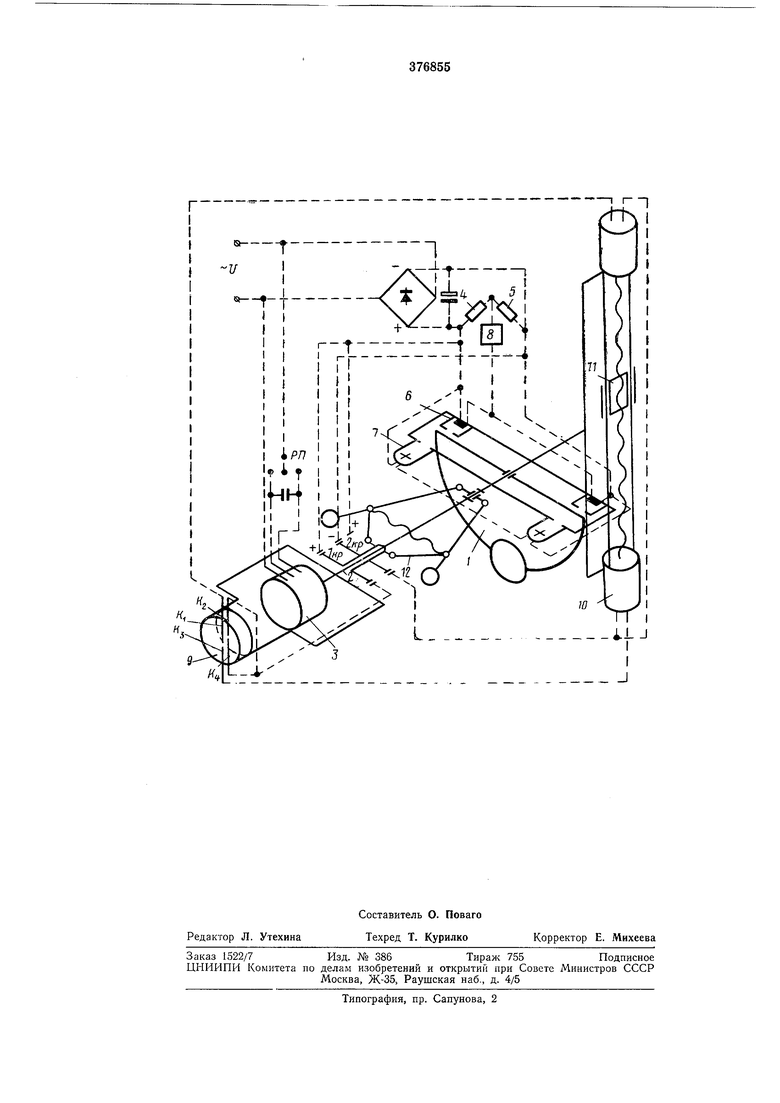
Схема предлагаемого автоматического уравновешивающего устройства представлена на чертеже.
Устройство содержит блок динамической балансировки вала, включающий чувсувительный элемент 1, который указывает плоскость расположения неуравновешенности и выполнен в виде сегмента, свободно посаженного на вал 2 привода 3, резисторы 4 и 5, два фоторезистора 6, включенных в плечи
мостовой схемы, два источника света 7, поляризованное реле 8 с контактами РП, чувствительный элемент 9 с контактами , который показывает наличие неуравновешенности ротора, двигатели 10, балансировочный груз
11 и центробежный регулятор 12. Последний
Отрегулирован таким образом, что с помощью контактов 1КР и 2КР после достижения критической скорости настройка системы управления изменяется на обратную.
Геометрические оси регулятора 12 чувствительных элементов / и Я привода 3 при установке в ротор совмещают с продольной осью последного.
В Предложенном устройстве чувствительные элементы / и 5 не предназначены непосредственно для уравновещивания роторов.
Элементы 7 и 9 работают за счет динамических свойств системы. На докритических скоростях чувствительные элементы автоматически показывают «тяжелую, а на закритических - противоположную («легкую) стороны ротора. При отсутствии прогибов, т. е. при уравновешенном роторе, уравновешивающее устройство отключается.
Устройство работает следующим образом.
При вращении неуравновещенного ротора с докритической скоростью вектор его прогиба совпадает с вектором неуравновешенности. Груз чувствительного элемента 1 устанавливается в диаметральной плоскости, проходящей через вектор прогиба. Если при этом чувствительный элемент одинаково закрывает фоторезисторы, мост, в который они включены, уравновешен. Контакт РП реле 8 находится в среднем положении. В случае, когда чувствительный элемент поворачивается и закрывает одно из фотосопротивлений, второе полностью освещено. При этом мост разбалансируется, и через реле 8 идет ток, контакт РП замыкается и включает привод 3, который поворачивает вал 2, а вместе с ним чувствительный элемент 9 и двигатели 10 с балансировочным грузом до того положения, при котором оба фоторезистора 6 освещены наполовину. Одновременно чувствительный элемент 9 указывает направление неуравновешенности и, замыкая контакты Ki, К.2 или Кз, Ki включает двигатели 10, которые, вращаясь в ту или другую сторону, перемешают груз 11 в направлении, в котором существующая неуравновешенность компенсируется. Двигатели перемешают груз до тех пор, пока существуюшая неуравновешенность не уравновесится (т. е. пока не разомкнутся все контакты чувствительного элемента 9.
В устройстве, где роторы работают на скоростях, выше критической, если их неуравновешенность изменяется во время работы, введен регулятор 12, отрегулированный таким образом, что по достижении критической скорости настройка системы управления двигателей 10 изменяется на обратную.
Это необходимо потому, что чувствительный элемент всегда показывает направление вектора прогиба, который при скоростях, больших критической, направлен противоположно вектору неуравновешенности.
Предлагаемое устройство обеспечивает автоматическое уравновешивание ротора на всех скоростях как ниже, так и выше критической.
Применение нескольких устройств соответственно расположенных на гибком роторе, обеспечивает автоматическое уравновешивание последнего по нескольким формам колебаний.
Предмет изобретения
1.Автоматическое уравновешивающее устройство, содержащее блок динамической балансировки вала с балансировочными грузами, отличающееся тем, что, с целью расщирения диапазона уравновешивания, блок динамической балансировки вала содержит следяшую систему установки балансировочных грузов в плоскости неуравновешенности, выполненную в виде чувствительного элемента, например сегментного маятника, расположенного в плоскости, перпендикулярной оси вала, двух источников света и фоторезисторов, расположенных симметрично по обе стороны оси вала в плоскости чувствительного элемента, и мостовой схемы, в плечи которой включены фоторезисторы, а в диагональ - поляризованное реле, соединенное с приводом, установленным на оси вала, и жестко связанную с приводом следящую систему компенсации неуравновещенности, выполненную в виде чувствительного элемента определения направления компенсации, соединенных с ним двигателей, кинематически связанных с балансировочными грузами.
2.Устройство по п. 1, отличающееся тем, что в нем установлен вдоль оси вала центробежный регулятор с контактами, соединенными через чувствительный элемент определения направления компенсации с двигателями. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Автобалансирующее устройство | 1974 |
|
SU541096A1 |
| Способ балансировки гибкого ротора с распределенной неуравновешенностью | 1956 |
|
SU114957A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| Устройство для сигнализации дебаланса вращающихся тел | 1972 |
|
SU478210A1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| Способ автоматической многовекторной балансировки рабочих колёс турбомашин и устройство для его реализации | 2022 |
|
RU2789214C1 |
| Автоматическое балансировочное устройство | 1972 |
|
SU460464A1 |
| Способ автоматической балансировки центрифуги | 1984 |
|
SU1650256A1 |
| Автоматическое балансирующее устройство | 1986 |
|
SU1352270A1 |