(54) АВТОБАЛАНСИРУЮЩЕЕ УСТРОЙСТВО
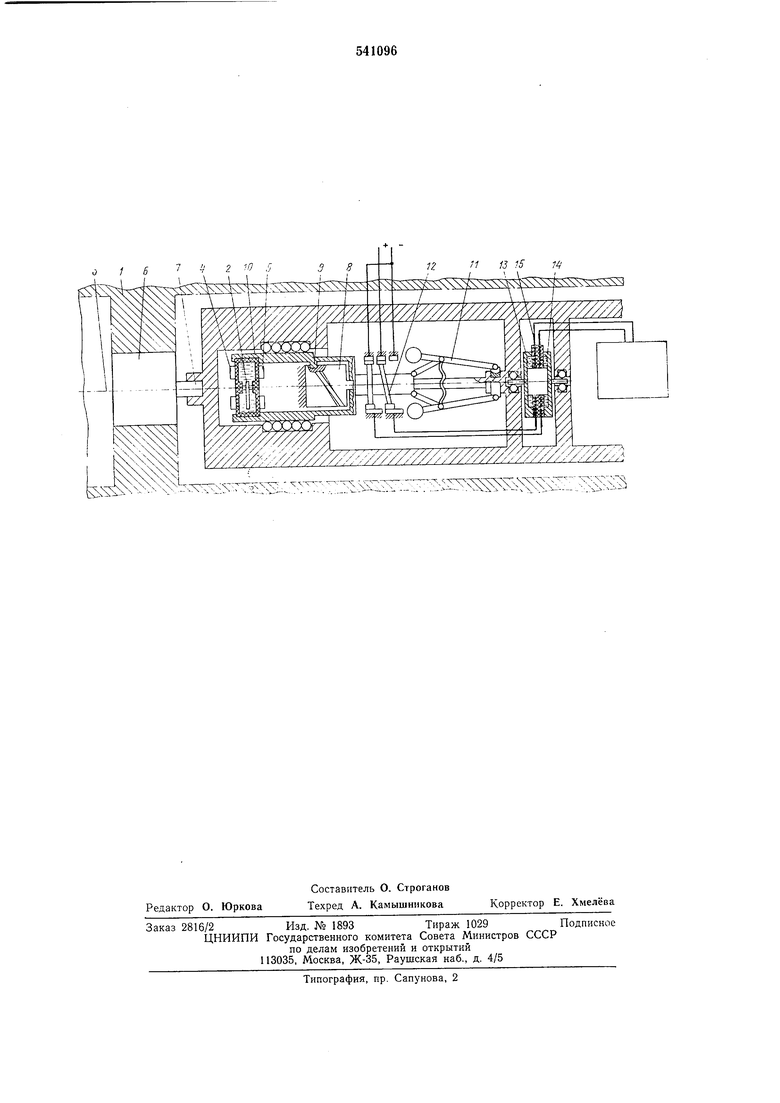
cTii, перпендикулярной к осп 3 ротора 1, фотореле, состоящего из двух источников 4 света п фоторезисторов 5, мостовой схемы (не показана), в плечи которой включены фоторезисторы, а в диагональ - поляризованное реле, и электропривода 6, связанного с поляризованным реле.
С валом 7 электропривода следящей системы передвижения грузов вокруг ротора жестко связан пространственный кулачок 8, снабженный толкателем 9. Фотореле установлено на жестко связанной с толкателем муфте 10 центробежного регулятора И, установленного с возможностью поворота вокруг ротора. Профиль кулачка 8 соответствует фазовой характеристике балансируемого ротора, т. е. развернут таким образом, что при определенной скорости вращения ротора угол поворота центробежного регулятора равен соответствующему фазовому углу балансируемой системы. Центробежный регулятор 11 отрегулирован таким образом, что с помощью контактов 12 после достижения критической скорости настройка системы управления следящей системы передвижения грузов перпендикулярно оси ротора меняется на обратную. Следящая система передвижения грузов перпендикулярно к оси ротора выполнена в виде чувствительного элемента 13, соединенного с одной стороны с контактами 12 центробежного регулятора И, а с другой стороны - с входами двигателей электропривода, кинематически связанными с балансировочными грузами. Корпус 14 чувствительного элемента 13, в качестве которого используется электропроводная жидкость, с двумя парами контактов 15, находящимися в диаметральной плоскости, выполнен в виде маятника, центр тяжести которого расположен в плоскости контактов 12 центробежного регулятора.
Устройство работает следующим образом.
При вращении неуравновещенного (несбалансированного) ротора 1 с докритической скоростью центр тяжести чувствительного элемента 2 устанавливается в диаметральной плоскости, проходящей через вектор прогиба. С помощью центробежного регулятора 11 происходит поворот фотореле. Если чувствительный элемент одинаково закрывает фоторезисторы 5, мост, в который они включены, уравновешен, и контакты поляризованного реле находятся в среднем положении. В случае, когда чувствительный элемент 2 поворачивается и закрывает одно из фотосопротивлений, происходит разбаланс моста, через поляризованное реле идет ток, а его контакты замыкаются и включают электропровод 6.
Привод поворачивает вал 7, а вместе с ним источники 4 света, фоторезисторы 5, центробежный регулятор 11 и следящую систему передвижения грузов перпендикулярно к оси ротора до того положения, при котором оба фоторезистора освещены наполовину. Одновременно корпус 14 поворачивается вокруг вала ротора и устанавливается своим центром тяжести в диаметральной плоскости, проходящей через вектор прогиба. При этом плоскость расположения контактов 15 совпадает с плоскостью вектора прогиба. Толщина электропроводной жидкости, распределенной под действием центробежных сил по стенке корпуса 14 при наличии несбалансированности, неодинакова по окружности; она максимальна с той
стороны, куда направлен прогиб ротора. Жидкость замыкает одну из пар контактов 15, в результате чего включаются двигатели, перемещающие груз перпендикулярно к оси ротора. При достижении уравновешенности контакты 15 размыкаются.
Сравнительный анализ известных конструкций и описываемого устройства показывает, что последнее, учитывая изменение фазовой характеристики балансируемой роторной системы при изменении рабочей скорости, повыщает точность балансировки и позволяет расширить ассортимент роторов, подлел ащих точному балансированию.
Формула изобретения
Автобалансирующее устройство, содержащее ротор, балансировочные грузы, следящую систему передвижения грузов вокруг ротора,
выполненную в виде последовательно включенных динамического чувствительного элемента, фотореле и электропривода грузов, центробежный регулятор и следящую систему передвижения грузов перпендикулярно к оси
ротора, выполненную в виде чувствительного элемента и электропривода грузов, управляемого центробежным регулятором, отличающееся тем, что, с целью повышения точности балансировки, оно снабжено обратным пространственным кулачком, жестко связанным с валом электропривода следящей системы передвижения грузов вокруг ротора, и толкателем кулачка, а фотореле установлено на жестко связанной с толкателем муфте центробежного регулятора, установленного с возможностью поворота вокруг ротора.
Источники информации, принятые во внимание при экспертизе:
1- Колебания и уравновещивание роторов. Сборник. Под ред. А. Гусарова. М., «Наука, 1973, с. 107-113.
2. Авт. св. № 376855, кл. Н 02 К 7/04, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ УРАВНОВЕШИВАЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU376855A1 |
| Устройство для сигнализации дебаланса вращающихся тел | 1972 |
|
SU478210A1 |
| Автоматическое балансирующее устройство | 1986 |
|
SU1352270A1 |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 1998 |
|
RU2148806C1 |
| Машина для устройства горизонтальной разметки | 1988 |
|
SU1599462A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| Автоматическое балансировочное устройство | 1972 |
|
SU460464A1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ НИЗКОЧАСТОТНОГО ДИНАМИЧЕСКОГО БАЛАНСИРОВОЧНОГО СТЕНДА | 2010 |
|
RU2434212C1 |