1
Изобретение относится к автоматике, а именно к устройствам программного управления, использующим информацию в унитарном импульсном коде.
Известно устройство по авт. св. № 238647, в котором с целью повышения рабочей частоты фазового датчика обратной связи без повышения требований к быстродействию электронных элементов применен двухкаскадный импульсно-фазовый преобразователь.
Однако наличие специфических погрешностей, обусловленных дискретным во времени характером работы двухкаскадного импульсно-фазового преобразователя, ycлoжняet работу устройства.
Целью изобретения является повышение точности работы устройства.
Это достигается тем, что устройство содержит сумматор, два согласующих звена и два статических триггера. Одни из входов последних соединены с выходами делителей первого каскада импульсно-фазового преобразователя, а другие - с выходом рабочего канала второго каскада преобразователя. Выходы через согласующие звенья присоединены к соответствующим входам сумматора, выход которого соединен с приводом, а один из входов - с выходом фазового индикатора.
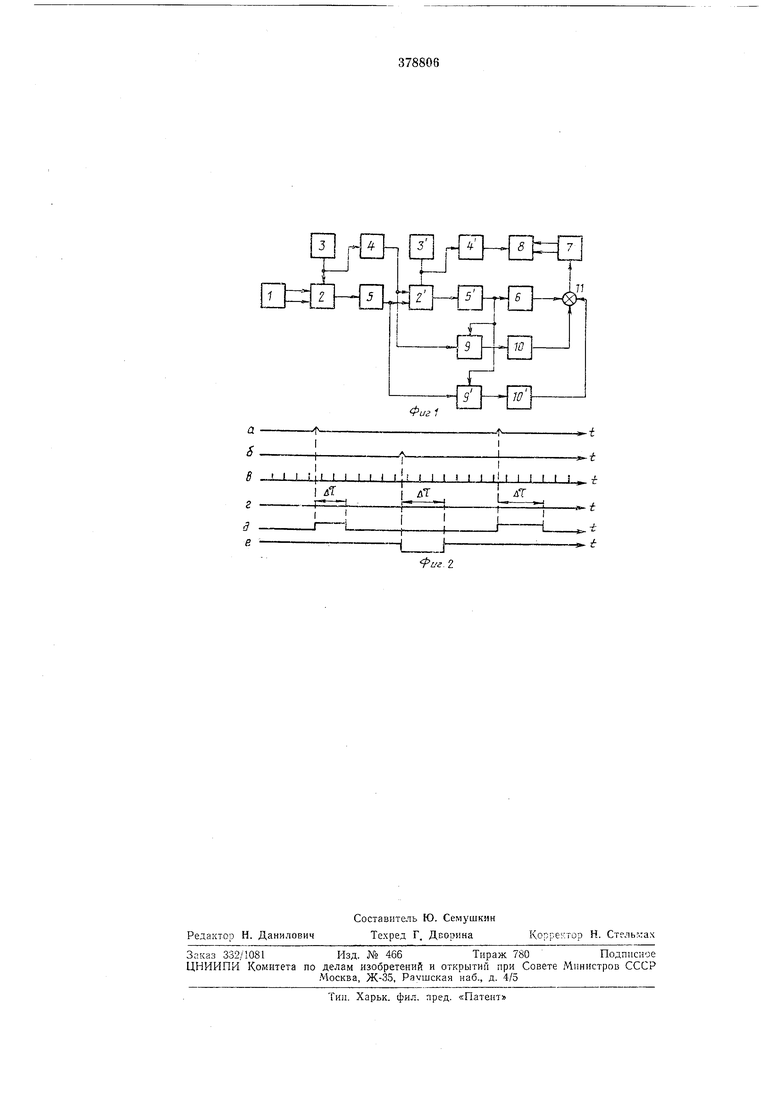
На фиг. 1 показана структурная схема предлагаемого устройства.
Оно содержит источник / импульсов унитарного кода, блоки 2 и 2 сложения-вычитания, генераторы 3, 3 тактовых импульсов, делители 4 т 4 R 5 и 5 частоты, фазовый индикатор 6, привод 7, датчик 8 обратной связи, статические триггеры 9 и 9, согласующие звенья 10 и 10, сумматор 11.
На фиг. 2 изображены временные диаграммы, поясняющие работу импульсно-фазового
преобразователя, где а - импульсы низкой частоты на положительном входе схемы сложения-вычитания 2; б - импульсы низкой частоты на отрицательном входе схемы ело. жения-вычитания 2; в - выходные импульсы генератора; г - импульсы на выходе делителя 5; д - импульсы на выходе триггера 9; е - импульсы на выходе триггера 9; г - длительность импульса.
Элементы 2-5 образуют преобразователь унитарного кода в сдвиг фаз двух последовательностей низкочастотных импульсов. Элементы 2-5 образуют второй каскад импульсно-фазового преобразователя, включенный последовательно с первым. Он преобразует
сдвиг фаз последовательностей низкочастотных импульсов G выхода первого каскада в сдвиг фаз двух высокочастотных последовательностей импульсов используемых для запитки датчика обратной связи и выделения сигнала рассогласования следящей системы. Сигнал рассогласования, выделяемый фазо-вЫМ индикатор DIM 6, управляет .приводе - 7, который перемещает исполнительный орган системы и связанную с ним подвижную часть датчика обратной связи, сводя рассогласование к нулю. Сдвиг фаз выходных последовательностей импульсов первого, каскада преобразователя определяется зависимостью: от радиан, где п - коэффициент деления делителей 4 т - разность количества импульсов, поступивших по положительному и отрицательному входам схемы сложения-вычитания 2. Второй каскад преобразователя работает аналогично первому. На его положительный вход поступают импульсы второго генератора 3 и вы.ходные импульсы одного из делителей первого каскада, а на отрицательный вход - выходные импульсы второго делителя. В промежутках времени между моментами поступления низкочастотных импульсов на схему сложения-вычитания 2 с выхода делителей 4 и 5 снимаются импульсы высокой частоты, сдвинутые по фазе на постоянную величину, В моменты поступления низкочастотных импульсое фаза выходных им.пульсов делителя 5 претерпевает скачкообразное изменение, знак которого совпадает со знаком входа, на который поступил импульс, а величина определяется зависимостью: Д -- радиан, где п - коэффициент деления делителей 4 и 5. Поскольку моменты поступления импульсов по каждому из входов чередуются во времени график зависимости сдвига фаз выходных импульсов делителя 5 относительно делителя 4 представляет собой последовательность прямоугольных импульсов, скважность которых определяется сл/виго.м фаз низкочастотных импульсов 4Ф, а разность уровней f выражением (2). Среднее значение этого сдвига выражается следующей зависимостью: т рад. Если в системе управления применен фазовый индикатор с линейной характеристикой, привод отрабатывает перемещение, проиорциональное усредненному значению сдвига фаз между высокочастотными последовательностями импульсов, т. е. пропорциональное количеству импульсов унитарного кода, поступивших на вход системы управления. Выражение (3) для среднего значения сдвига фаз между выходными последовательностями импульсов двухкаскадного преобразователя справедливо в том случае, если приращение фазы выходных импульсов делителя 5, определяемое выражением (2),.будет происходить мгновенно послеПоступления на вхоа схемы сложения-вычитания 2 каждого импульса с выходов первого каскада преобразователя. Фактически же между моментами поступления этих имлульсов и изменением фазы будет конечный промежуток времени, определяемый степенью заполнения делителя 5 в моменты прихода импульсов и частотой генератора .. Эта временная задержка эквивалентна погрешности преобразования первого каскада преобразователя, т. е. отклонению фазового сдвига v от фактического, определяемого соотношением (1). Погрешность может быть пересчитана в число импульсов унитарного кода на входе системы управления. Устройство управления не будет иметь погрешностей имлульсно-фазовото преобразователя, если последние скомпенсировать па входе привода, сформировав сигналы, пропорциональные ошибкам импульсно-фазового преобразователя и просуммировав их на входе привода с выходным сигналом фазоимпульсного детектора 6. На одни входы статических триггеров 9 и У подаются соответственно им:пульсы сложения и вычитания с выходов делителей первого каскада преобразователя, а другие входы соединены с выходом рабочего канала второго каскада преобразователя. Сигналы на выходах триггеров 9 и 9 пропорциональны соответственно ошибкам преобразователя при суммировании и вычитании второго каскада преобразователя и обратны по зпаку. Подав сигналы с выходов триггеров с определенным весом на сумматор И, удается скомпенсировать ошибки преобразователя. Вес, с которым сигнал поступает на суммирующий элемент, должен быть обратно пропорциональным коэффициенту деления делителей второго канала преобразователя. Он устанавливается согласующими звеньями Id и 10. Предмет изобретения Устройство для программного управления по авт. св. № 238647, отличающееся тем, что, с целью повышения точности работы устройства, оно содержит сумматор, два согласующих звена и два статических триггера, один из входов которых соединены с выходами делителей первого каскада импульсно-фазового преобразователя, вторые входы соединены с выходом рабочего канала второго каскада преобразователя, а выходы через согласующие звенья соединены с соответствующими входами сумматора, выход которого соединен с приводом, а один из входов - с выходом фазового индикатора.
f
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1973 |
|
SU489083A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1969 |
|
SU253542A1 |
| Устройство для программного управления | 1979 |
|
SU938262A2 |
| Устройство для программного управления | 1980 |
|
SU903811A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1972 |
|
SU434381A1 |
| ИМПУЛЬСНО-ФАЗОВОЕ УСТРОЙСТВО ДЛЯ ПРОГРАММНОГОУПРАВЛЕНИЯ | 1969 |
|
SU238647A1 |
| Импульсно-фазовый преобразователь | 1973 |
|
SU448594A1 |
| Программный генератор | 1980 |
|
SU917319A1 |
| Преобразователь код-фаза | 1977 |
|
SU658734A1 |
| Программный генератор | 1983 |
|
SU1190484A1 |