1
При управлении приводами, осуществляющими перемещение груза из одного пункта в другой, требуется выдержать определенный закон движения - диаграмму скорости. Обычно для больщинства механизмов (лифты, щахтные подъем.вики, каватные дороги и тому подобные) разгон и замедление осуществляется при постоянном ускорении, т. е. по линейному закону. Наиболее существенным является точность выполнения, участка замедления, сказывающаяся На точности остановки механизма и времени дотяжки. Формирование управляющего сигнала, подаваемого на вход системы автоматического регулирования скорости привода, осуществляется в функции пути по закону V /2cSp при разгоне и при замедлении, где V -текущее значение скорости;
УМ - максимальная скорость; а - величина ускорения (замедления);
SP - путь, отсчитываемый от начала разгона;
5з - путь, отсчитываемый от начала замедления.
В настоящее время в промышленных системах автоматизации перестановочны ми механизмами формирование управляющего сигнала осуществляется при помощи аналогов ых
методов и реализующих эти методы электромеханических устройств. В связи с этим системы регулирования скорости обладают низкой точностью и надежностью. Малая точность задания эталонного сигнала при помощи профилирующих дисков (особенно на участке замедления) приводит к увеличению времени дотяжки и снижению производительности механизма. Точность цикла перестановки определяется качеством изготовления профилирующего диска, реализующего закон V У2а8 , его размерами, качеством кинематических связей. Применение профилирующих дисков в системах, работающих на несколько точек и при различных скоростях затруднено.
Известно устройство формирования- управляющего сигнала для систем автоматического регулирования скорости перестановочных механизмов, содержащее суммирующий и реверсивный счетчики, схему сравнения и пороговый элемент, вентиль и триггер.
Цель изобретения - повысить точность и надежность устройства.
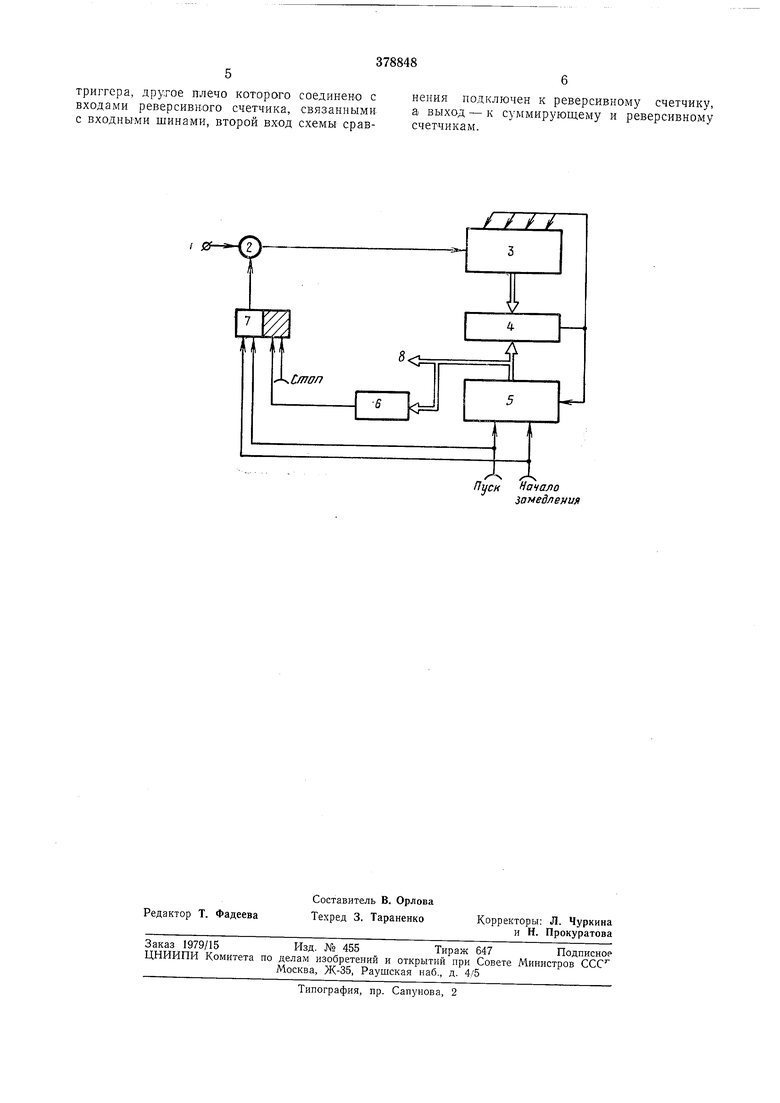
Это достигается тем, что вход устройства через вентиль, открываемый при помощи триггера сигналами «Пуск и «Начало замедления и закрываемый сигналом «Стоп и «Максимальная скорость, соединен со вхо дом суммирующего счетчика, выход, которого подключен ва один вход схемы .сравнения, а на другой ее вход подключен выход реверсивного счетчика. Выход схемы сравнения соединен со входом, реверсивного счетчика и шиной сброса суммируЮЩего счетчика, на клеммы реверса реверсивного .счетчика поступают сигналы «Пуск и «Начало за|Медления, а выход этого счетчика соединен со входом порогового элемента , формирующего сигнал максимальной скорости и на выход устройства. На чертеже изображена блок-схема предлагаемого устройства,. Устройство содержит вход 1, вентиль 2, суммирующий счетчик 5, схему сравнения 4 ГиггеГ7 ГвьтхоГГ « / ж Вход 1 устройства формирования, управляющего сигнала через вентиль 2 соединен со входом суммирующего счетчика- 3. Вентиль соединен также с триггером 7, на который поступают сигналы «Пуск, «Начало замедления., .максимальная скорое „ .С™„.. Сигналы с выходов суммирующего счетчика 3 и реверсивного счетчика 5 поступают на .схему сравнения 4, выход которой соединен со входом реверсивного счетчика 5 и шиной сброса, в нулевое состоящие суммирующего о ./1 ./ счетчика 3. Выходной код реверсивного счетчика является цифровым управляющим сигналом для систем авторегулирования скорости и поступает на, выход 5 устройства. г-чо Этот же код поступает на пороговый элемент 6, в который предварительно вводится код заданной, максимальной скорости. Устройство работает следующим образом. Предварительно счетчики устанавливаются в нулевое состояние, а вход 1 подключается к датчику ,путевых импульсов, который может быть фотоэлектронным, индуктивным, матнитомодуляционным и т. д. Датчик ,предназначен для формирования путевого им.пульса при1 перемещевии перестановочного механизна на величину выбранного кванта пути. Beличина кванта определяется- выбранной точностью регулирова,ния скорости и остановки механизма. При подаче команды «Пуск триггер 7 становится в положение, при котором вентиль 2 открывается и входные путе вые импульсы поступают на вход суммирующего счетчика 3. Схема сравнения 4 и цепь сброса этого .счетчика образуют обратную связь, устанавливающую счетчик в нулевое состояние, .когда код суммирующего счетчика 3 достигает кода, находящегося в этот момент Б.ремени в реверсивном счетчике 5. Схема сравнения работает по логике «больще:- .меньше. Появление сигнала на выходе схемы сравнения вызывает сброс в нуль суммирующего счетчи-ка 5 и увеличение кода реверсивного счетчика 5 на единицу. Команда «Пуск устанавливает направление работ,ы реверсивного счетчика 5 на сложение. Если обозначить текущую частоту ,путевых квантов через fji, а частоту появления, сигнала на выходе схемы сравнения череа fi, то можню записать, что fi - , где Ут - текущий код реверсивного счетчика 5. В свою очередь У., т. е. fi . Исключая из иервого уравнения fi, получим зависимость УтйУт М или после интегрирования обеих частей : f. где 5р - .путь с момента пуска. Это говорит о том, что код реверсивного .счетчика У. 25 является управляющим сигналом для системы регулирования скорости в функции пути. Интенсивность разгона ускорения,) можно задавать мааштаб1ым „ величины. В дискретных системах, регулирования скорости код используется непосредственно, а в аналоговых пре JfS p е7и7рТз™Г Ге. росГ™ „,.„„, L,..,L „. .::. реверсивного счетчика 5, происходит до тех ,пор, ,пока код УТ не достигнет заранее заданной величины УМ. При этом срабатывает пороговый элемент 5 и на его выходе появляется сигнал УМ, который посредством тригс 1 ,Л К Ml I UIUUDIH закрывает вентиль 2. р механизма к точке назна,чеВИЯ на величину заданного пути замедления команда «Начало земедления открывает векn.jmanAci М1ача.л( ocivicA«yic;nnn// ji )UDiDCi i Dcn и устанавл,ив.ает направление работы J, 5 на вычитание. Эта 1,т2. может формироваться любым устройством контроля пути, например счетчиком, подсчитывающим путевые импульсы. При сигналы, возникающие на выходе схемы , вызывают уменьшение кода j ..f версивного счетчика 5. Код УТ изменяется по закону. v, , где 5з -путь, отсчитываемый от начала замедления. |По достижении точки назначения. команда «Стоп запирает вентиль 2. Предмет изобретения Устройство формирования управляющего сигнала для систем автоматического регулирования скорости перестановочных механизмов, содержащее суммирующий счетчик, первым входом подключенный к венпгилю, а выходом к схеме сравнения, реверсивный счетчик, пороговый элемент и триггер, отличающееся тем, что, с целью увеличения точности и надежности устройства, выход реверсивного счетчика подключен к выходу устройства и через пороговый элемент к одному плечу
триггера, другое плечо которого соединено с входами реверсивного счетчика, связанными с входными шинами, второй вход схемы сравнения подключен к реверсивному счетчику, а выход - к суммирующему и реверсивному счетчикам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое программное устройство для задания скорости для шахтных подъемных машин | 1978 |
|
SU765174A1 |
| Устройство для управления шахтной подъемной машиной | 1978 |
|
SU745845A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Устройство для управления электроприводом | 1986 |
|
SU1335934A1 |
| Устройство позиционирования | 1979 |
|
SU798722A1 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Цифровое устройство задания скорости дляОРгАНичиТЕлЕй СКОРОСТи шАХТНОй пОд'ЕМНОйМАшиНы | 1979 |
|
SU835919A1 |
| Устройство управления скоростью шахтной подъемной машины | 1978 |
|
SU745844A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
Пуск Начало
аг едле}1ия
