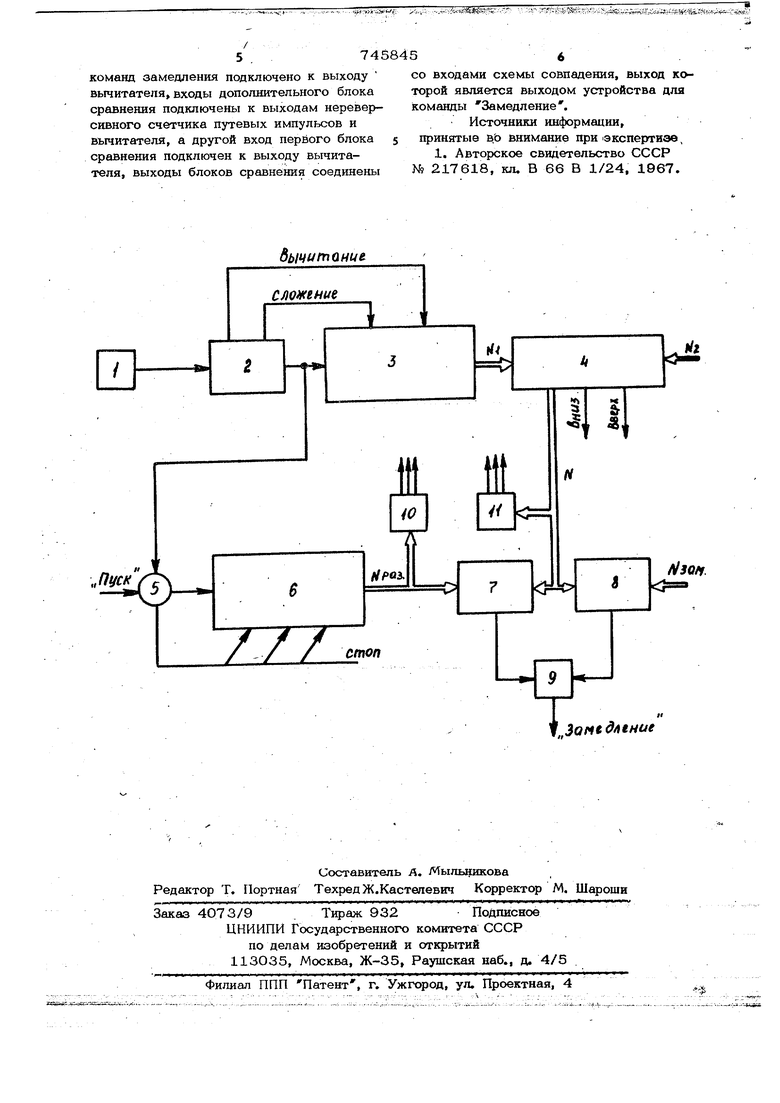
Изобретение относится к средствам автоматизации рудничных подъемных установок, а именно к аппаратуре (|юрмирования путевых команд для управления подъемной машиной. Известно цифровое устройство для прог раммного регулирования скоростд подъемной машинь, содержащее датчики путевых импульсов, сигнум-датчик, реверсивный счёт ик путевых импульсов, ш гаитаггель, блок сравнения, один из входов которого соединен с -зада чиком пути замедления, и управляемый вентиль, управляющий вход которого соединён с элементом пуска i Недостатком данного устройства является невозможность многопозиционного движения в связи с тем, что треугольгная диаграмма скорости не может быть обеспечена путевыми командами. Цель изобретения - расширение (JiyHKцирнальньхх возможностей подъемной устано кй, Это достигается тем, чео устройство снабжено нереверсивным счетчиком путевых импульсов, наборШ 1Мн полями команд разгона и замедления, схемой совпадения и дополнительным блоком сражения, причем вход а еверсивного счетчика ухфавляемый веигиль соединен с выходом сигнум-датчика, а выхсщ с наборным полем команд разгона, Ha6qpHoe поле команд замедления подключено .к выходу вычитатся, дополнительного блока сравнения аодключ ЕЫ к выходам нереверсивного счетчика путевых имоульсов в вычигателя, а другой вход первого блока сравнения подключен к выходу вычвтателя, выходы блоков соединены со входами схемы совоаде1шя, выход ко горой является выходом устрс ства для команды Замедление. На чертеже изображена фунКциоваль ная схема устройства для ущ}авлення шахтной машиной. Устройство содержит датчики 1 аутевых импульсов, сигнум-датчик 2, реверсивный счетчик 3 путевых импульсов, комбинационный вычитатель 4, вевтиль
745845
5, нереверсивный счетчик 6 путевых импул 1ров, схемы 7 и 8 сравнения кодов, cxais a 9 И совпадения, наборное попе 1О путевых команд разгона, наборное поле 11 путевых команд замедления.
Устройство .работает следующим обjpaaoM,
Перед началом работы в вьгчитатель 4 вводится кодЫ заданного пункта следования. На выходе вычитателя при этом возникает код N N .j - N ;| расстояния от клети до заданного пункта и сигнал напрайлёния движения к этому пункту, определяющий направление вращения подъ- емного машины. Код Ы д - цифровой экви- 15 валент расстояния от перемещаемого сосуда до исходной точки начала отсчета за которую принимается верхняя точка ствола, на выходе реверсивного счетчика 3 существует непрерывно и инвариантно относительно вводимой оператором информации. Код расчетного значения пут замедления Нзаи водится в схему 8 сравнения при установке устройства на подъемной машине. Исполнительная команда Пуск открывает вентиль 5. При работе подъемной машины датчики путевых им пулйсов выданЛг путевые сигналы, сдвинутые по фазе. Сигнум-датчик 2 формирует путевой импульс и сигналы направления движения, устанавливаюш1ие направ ление работы реверсивного счетчика 3. При движении вниз реверсивный счетчик 3 работает на сложение, а при движении вверх - на вычитание. Эти же путевые импульсы через угкрытый вентиль 5 поступают на вход нереверсивного счетчика 6, код расчетного значения пути разгона Npaj. на выходе которого начинает плавно расти. При достижении кодом Mpa-j значений, набранных на наборном поле 10 путевых команд разгона, последнее формирует путевые команды, используемые в систе ме регулирования приводом подъемной машины, защиты и сигнализации. В это время код Н на выходе комбинационного вычитателя 4 плавно уменьшается. Когда перемещаемый сосуд достигает половины расстояния между точками обслуживания, код N розстанет больше кода NI и схема 7 сравнения кодов вьщает сигнал, который запитывает один из входов схемы 9 совпадения. Сигнал,, этот буде существовать все время, пока ,t.e. вторую половину расстояния между точками обслуживания.
При дальнейшем движении код N уменьшится настолько, что сравняется или станет меньше заданного пути замедления 1 д и,т.е. Н зам схема 8 сравнения вьодаст сигнал, поступающий во второй вход схемы 9 совпадения, . которая формирует путевую команду Замедление. Здесь выполняется условие
Нрс, U .Vl с,дм.
Если расстояние между точками обслуживания меньше заданного значения пути замедления, то схема 8 сравнения вьщаст сигнал, сразу же после начала работы подъемной машины, подача команды Замедление произойдет при достижении сосудом ПОЛОВИНЫ расстояния между точками обслуживания, т.е. происходит автомагический переход на треугольную тахограмму. Новый цикл работы заключается в по- . даче кода заданного пути следования VI2 и команды Пуск. Таким образом, предложенное устройство может формировать путевые команды как на участке разгона, так и на участке замедления. Выбор точки следования осуществляется заданием кода заданного пункта следования М -х , поэтому устройство обеспечивает движение в любую точку ствола, в том числе при треугольной тахограмме. Команда Замедление при треугольной тахограмме формируется автоматически без предварительного набора, чем обеспечивается многопозиционность. Формула изобретения Устройство для управления шахтной подъемной машиной, содержащее датчики путевых импульсов, сигнум-датчик, реверсивный счетчик пугевых импульсов, вычитатель, блок сравнения, один из входов которого соединен с задатчиком пути замедления, и управляемый вентиль, управляющий вход которого соединен с элементом пуска, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено нереверсивным счет иком путевых . импульсов, наборными полями команд разгона и замедления, схемой совпадения и дополнительным блоком сравнения, причем вход нереверсивного счетчика через управляемый вентиль соединен с выходом сигнум-датчика, а выход с наборным полем команд разгона, наборное поле
команд замедления подключено к выходу вычитателя,входы дополнительного блока сравнения подключены к выходам нереверсивного счетчика путевых импульсов и вычитателя, а другой вход первого блока сравнения подключен к выходу вычитателя, выходы блоков сравнения соединены
со входами схемы совпадения, выход которой является выходом устройства для команды Замедление.
Источники информации, принятые в.о внимание при экспертизе,
1. Авторское свидетельство СССР № 217618, кл. В 66 В 1/24, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОГРАММИРОВАНИЯ ДВИЖЕНИЯ | 1971 |
|
SU306481A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Цифровое программное устройство для задания скорости для шахтных подъемных машин | 1978 |
|
SU765174A1 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Устройство для программного управления | 1981 |
|
SU960740A2 |
| Устройство для программногоупРАВлЕНия | 1978 |
|
SU813374A1 |
| Цифровое устройство задания скорости дляОРгАНичиТЕлЕй СКОРОСТи шАХТНОй пОд'ЕМНОйМАшиНы | 1979 |
|
SU835919A1 |
| Ограничитель скорости шахтной подъемной машины | 1973 |
|
SU469650A1 |
| Устройство для управления режимами работы шахтного подъемника | 1981 |
|
SU1094827A1 |
| Устройство для формирования зашитной тахограммы органичителя скорости шахтной подъемной машины | 1984 |
|
SU1240715A1 |
Вычигпаиие AZZ ,3QMtdAtHue
