1
Изобретение касается навигационных плановых приборов, предназначенных для использования в составе бортового оборудования летательных аппаратов.
Известны навигационные приборы, представляющие собой указатели теку. щих и заданных значений курса, азимута, приемника курсового угла радиостанции, причем приемники соединены с. усилителем и двигателем.
Цель изобретения - упрощение ли цевой части прибора..
Это достигается посредством связи через механический дифференциал приемника курсового угла радиостанции и стрелки указателя текущего азимута и курсового угла радиостанции с выходной осьи следящей системы отработки текущего курса.
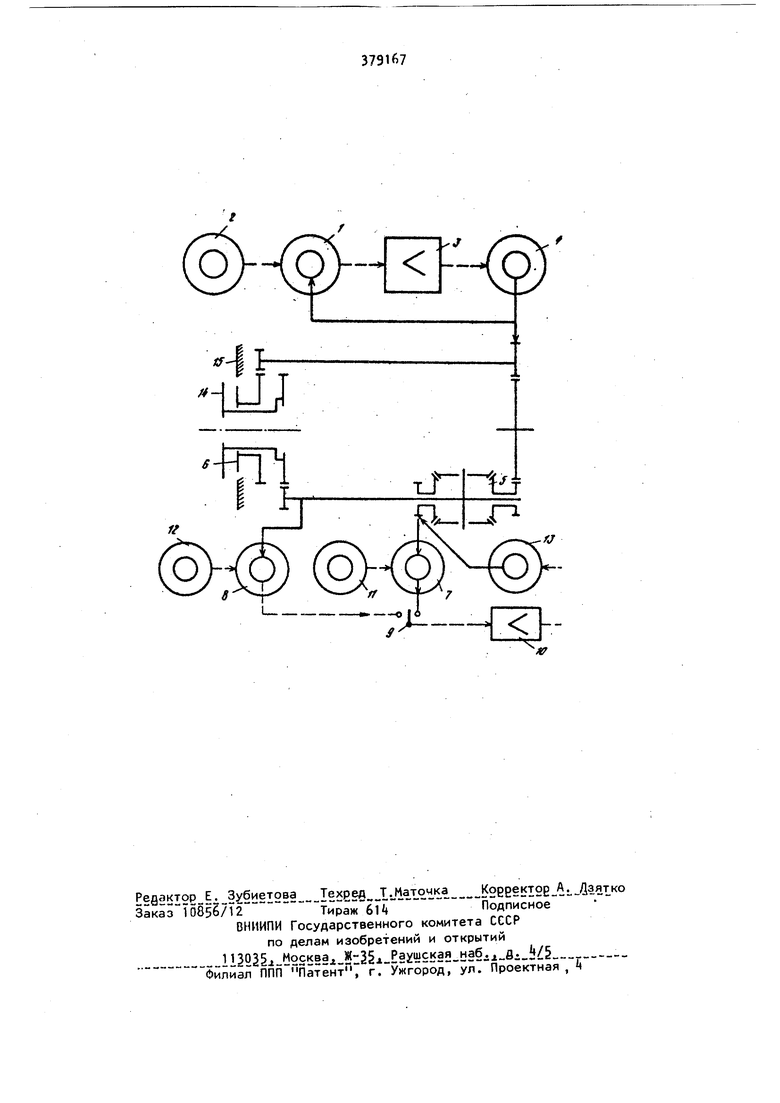
На чертеже изрбражена схема прибора.
Приемник 1.текущего курса связан с датчиком 2 текущего курса. Выходная обмотка, приемника соединена со входом усилителя 3. Выход усилителя соединен с управляющей обмоткой исполнительного двигателя. Ось исполнительного двигателя через зубчатое зацепление связана с ротором приемника с входной шестерней 5 механичес кого дифференциала и шкалой 6 отсчета курса.
При появлении сигнала рассогласования между датчиком 2 и приемником 1 текущего курса следящая система начинает работать.Исполнительный двигатель будет вращаться и через зубчатое зацепление разворачивать приемник текущего курса до тех пор, пока на входе усилителя сигнал станет
0 равным нулю.
При этом шестерня 5 дисЬференциала и шкала 6 курса развернутся на угол, пропорциональный поступившем
сигналу курса. Входная шестерня 5 дифференциала через зубчатое зацепление связана с приемником 7 текущего азимута. Приемник 8 курсового угла через зубчатое зацепление связан с выходной осью 5 дифференциала. Выходные обмотки приемников 7 и 8 через контакт реле 9 связ(аны со входом усилителя 10.
Таким образом, на вход усилителя 10 поочередно подается сигнал текущего азимута или курсового угла радиостанции в зависимости от режима работы прибора.
В этом случае, если поочередная подача сигналов текущего азимута или курсового угла с измерителей 11 и
12 этих сигналов на приемники 7 и 8 обеспечивается схемой систе№1, использукичей навигационный плановый прибор, контакты реле 9 могут быть заменены резисторами.
Выход усилителя 10 связан с обмоткой исполнительного двигателя 13. Установленная на выходной оси 5 дифференциала стрелка 1 будет своим прямь1м концом показывать текущий азимут самолета относительно подвижной шкалы 6 курса и обратным концом - курсового угла относительно неподвижной шкалы 15 связанной с корпусом прибора.
Формула изобретения
Навигационный плановый прибор, содержащий следящие системы для отработки текущего курса, текущего курсового угла радиостанции и угла сноса, механический дифференциал, одна входная шестерня которого через зубчатое зацепление связана с приемником текущего азимута, приемник курсового угла радиостанции, связанный через зубчатое зацепление с выходной осью механического дифференциала, при этом приемники соединены с усилителем и двигателем, и стрелку-индикатор о т л и ч а ю щ и и с я тем, что, с целью упрои4ения лицевой части прибора, в нем стрелка-индикатор соединена с ротором приемника курсового угла радиостанции и выходной осью механического дифференциала.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННО-ПИЛОТАЖНЫЙ ПРИБОР | 1965 |
|
SU257541A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
-ЦЛ
fj
