Изобретение относится к судострое нию, в частности к автоматической системе управления рулем судна. Известна автоматическая система управления рулем судна, оборудованного следящей лебедкой, содержащая сельсин-датчик курса гирокомпаса, сел син-приемник курса авторулевого и ме ханически связанные с ним тахогенератор, сельсин-трансформатор, асинхронный электродвигатель с редукторо и линейный вращающийся трансформатор интегратора, электрически соединенны с масштабным вращающимся трансформатором, связанным с фазочувствительным усилителем Однако при работе устройств передача грузов на ходу траверзным способом, когда требуется точное соблюдение дистанции между передающим и принимающим судном, такие авторулевые, работающие независимо друг от друга, не в состоянии обеспечить ста бильность расстояния между судами вследствие длиннопериодных их- колебаний в курсовом угле при движении в автоколебательном режиме даже в случае движения судов идеально тихой воды и полного безветрия. В условиях волнения моря картина совместного движения судов усложняется. Дополнительно- к измерению дистанции добавляется составляющая, вызванная поперечной качкой судов. Цель изобретения - повьш1ение точности удержания судов на заданном расстоянии друг от друга при движении параллельными курсами в процессе работы устройства для передачи грузов посредством канатной дороги. Указанная цель достигается тем, что система снабжена переключателем режима управления, по крайней мере одним сельсином-датчиком дистанции между судами и дополнительным редуктором, причем сельсин-приемник курса связан с сельсин-датчиком дистанции посредством переключателя режима управления, а ротор указанного сельсинадатчика дистанции кинематически связан с валом барабана следящей лебедки посредством дополнительного редуктора.
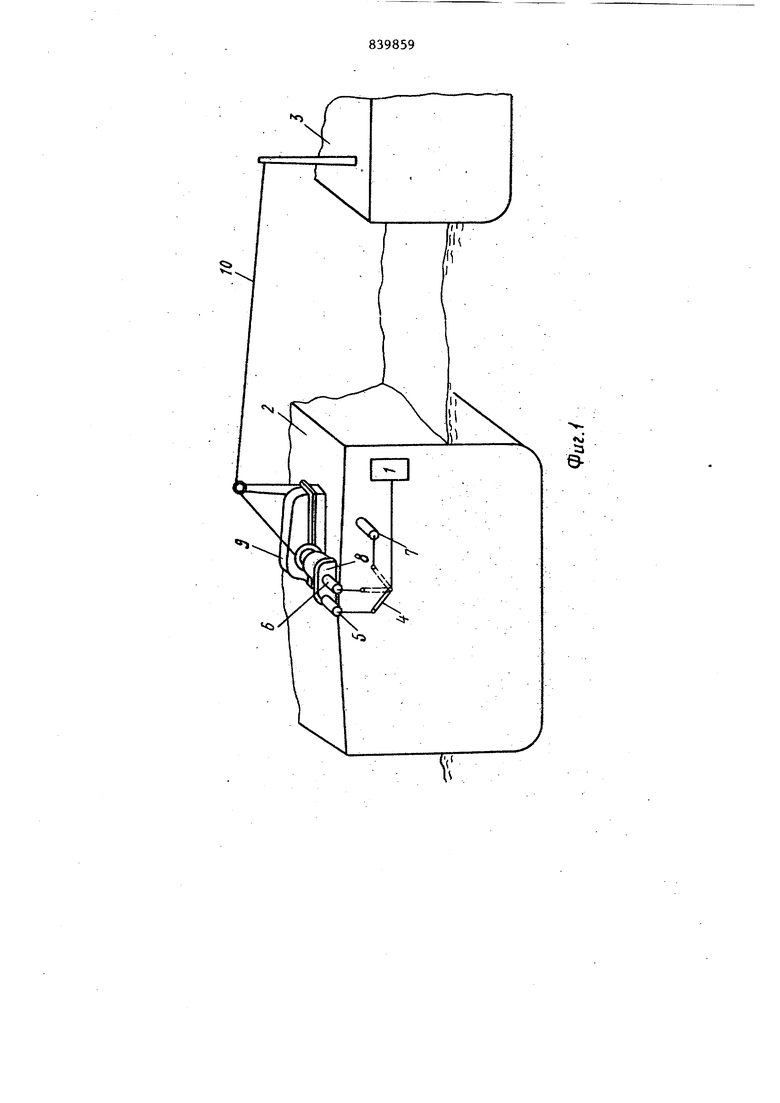
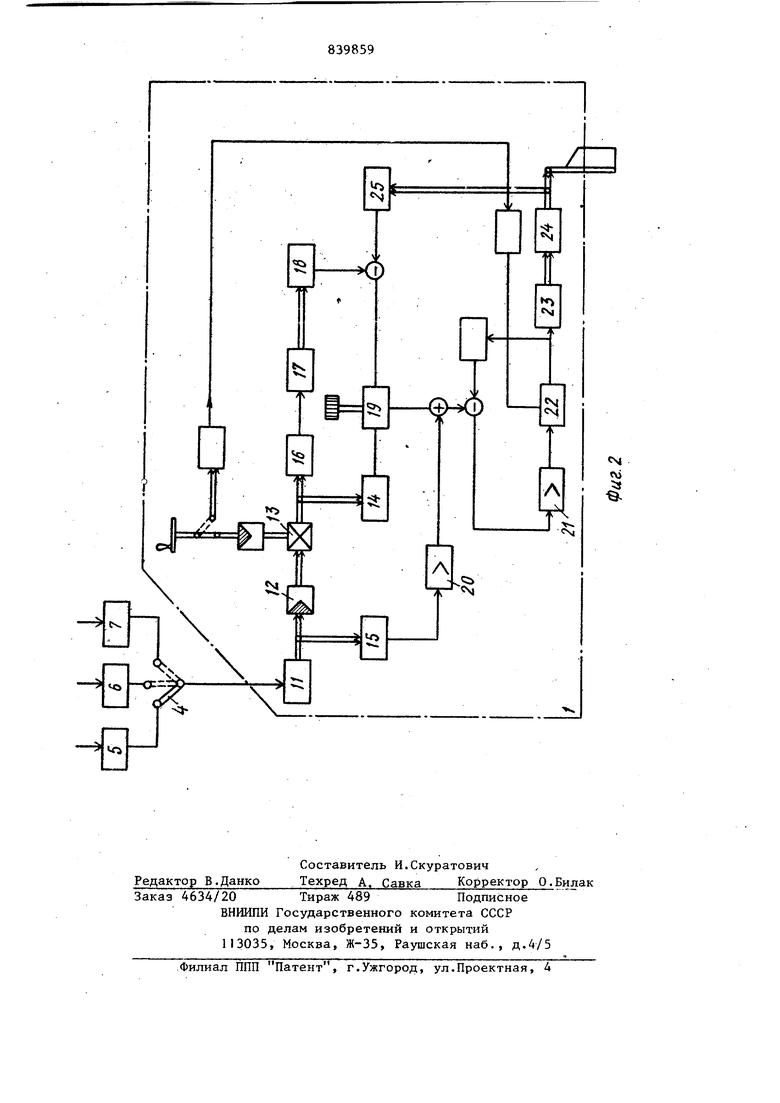
На фиг. показана упрощенная схема автоматической системы управления рулем; на фиг.2 - электромеханическая структурная схема автоматической системы управления рулем.
Автоматическая система управления рулем включает авторулевой 1, установленный на одном из двух производящих перегрузку судов 2 и 3 и посредством переключателя 4 режима упра ления подключаемый к сельсин-датчикам 5 и 6 дистанции, либо к сельсиндатчику 7 гирокомпаса. Сельсин-датчики 5 и 6 дистанции своими роторами соединяются с быстроходными валами (на чертеже не показаны) редуктора 8 тихоходный вал которого (на чертеже не показан) соединяется с валом барабана лебедки 9 несущего каната 10. Передаточные отношения быстроходных валов редуктора 8 отличаются друг от друга в два раза.
Сельсин-приемник 11 курса с одной стороны через необратимую червячную передачу 12 и механический дифференциал 13 связан с линейным вращающимся трансформатором 14 курса, а с другой стороны - с электродвигателем 15, работающим в режиме тахогенератора, а также через механическую передачу с интегрирующим устройством, состоящи из сельсина-трансформатора 16, асинхронного электродвигателя 17 с редуктором и линейного вращающегося трансформатора 18.
Обмотка линейного вращающегося трансформатора интегратора 18 соединена с одной из обмоток масштабного вращающегося трансформатора 19, а другая обмотка трансформатора 19 через усилитель 20 - с обмоткой тахо-генератора 15. .
Масщтабный вращающийся трансформатор 19 и усилитель 20 связаны с предварительным усилителем 21, который, в свою очередь, соединен с- обмоткой управления электромагнитного усилителя 22, обеспечивающего работу исполнительного электродвигателя 23, который управляет рулевой машиной 24. С валом этой машины механически связан линейный вращающийся трансформатор 25 руля, электрически связанный с
масштабным вращающимся трансформатором 19.
Автоматическая система управления рулем работает следующим образом.
При отсутствии волнения моря и качки судов авторулевой 1 переключателем 4 режима управления соединяется с сельсином-датчиком 5 дистанции, которого соединен с тем валом редуктора 8, у которого передаточное отношение большое.
При изменении дистанции между судами на величину д1 несущий канат 10 начинает удлиняться либо укорачиваться, а барабан лебедки 9 приходит во вращение, которое через редуктор 8 передается сельсину-датчику 5 дистанции, при этом ротор сельсина-приемника II также приходит во вращение, через червячную передачу 12 и механический дифференциал 13 передаваемое линейному вращающемуся трансформатору. 14 курса, с обмоток которого снимается напряжение, пропорциональное изменению дистанции К л L и подаваемое на одну из обмоток масштабного вращающегося трансформатора 19.
Так как одновременно с вращением трансформатора 14 вращается ротор электродвигателя 15, работающего в режиме тахогенератора, с его обмоток снимается напряжение, пропорциональQ L
ное скорости измерения дистанции, которое, будучи усилено усилителем 20 поступает на статорную обмотку масштабного вращающегося трансформатора 19. Сигнал тахогенератора 15 меняет величину перекладки руля в зависимости от скорости измерения дистанции между судами.
Повороты сельсина-приемника 11 курса передаются также ротору сельсина-трансформатора 16, который вырабатывает напряжение, поступающее в обмотку интегрирующего двигателя 17 Если изменение дистанции L является симметричным относительно средней величины LCP, то колебания ротора двигателя 17 гасятся редуктором, ротор линейного вращающегося трансформатора интегратора 18 остается в нулевом положении, а напряжение на его выходе отсутствует.
При асимметричном изменении дистанции L разность отклонения дистанции от средней величины в сторону уменьшения и в сторону увеличения накапливается, ротор трансформатора интегратора 18 поворачивается на угол, пропорциональный накопленной разности смещений в сторону уменьше.ния и в сторону увеличения, и вырабатывается сигнал, пропорциональный интегралу от изменения дистанции KnlbLdt, обеспечивающий смещение нулевого положения руля от диаметральной плоскости, и изменения дистанции М становятся симметричными.
Напряжение с выхода трансформатора 18 поступает на роторную обмотку масштабного вращающегося трансформатора 19. Сумма сигналов K,iL,Kigj подается на вход предварительного фазочувствительного усилителя 21 и затем в обмотку управления электромаишпного усилителя 22 через исполнительный элект родвигатель 23, управляющий рулевой машиной 24. Одновременно с перекладкой руля повора.чивается ротор линейного вращающегося трансформатора 25 руля и вырабатываемое напряжение, которое пропорционально углу перекладки руля , также поступает на роторную обмотку трансформатора 18 и служит сигналом внутренней отрицательной обратной связи авторулевого.
.При движении судов в штормовую погоду на изменение дистанции между судами л L помимо длиннопериодных их колебаний в курсовом угле влияет также поперечная качка судов. Для загрубления сигнала о величине Д L производится переключение авторулевого на сельсин-датчик 6, ротор которого соединен с валом редуктора В, у которого передаточное отношение малое При этом один оборот ротора сельсинадатчика дистанции происходит при вдво большей величине til, что уменьшает частоту включения рулевой машины и увеличивает ее моторесурс.
Такое выполнение системы позволяет повысить точность удержания судов на заданном расстоянии друг от друга при движении параллельными курсами в процессе работы устройства для передачи грузов посредством канатной дороги.
Формула изобретения
Автоматическая система управления рулем судна,оборудованная следящей лебедкой, содержащая сельсин-датчик курса гирокомпаса, сельсин-приемник- курса авторулевого и механически связанные с ним тахогенератор, сельсин-трансформатор, асинхронный электродвигатель с редуктором и линейныйвращающийся трансформатор интегратора -курса авторулевого, электрически соединенный с масштабным вращающимся трансформатором, связанным с фазочувствительным усилителем,о тличающаяся тем, что, с целью повышения точности удержания судов на заданном расстоянии друг от друга при движении параллельными курсами в процессе работы устройства для передачи грузов посредством канатной дороги, она снабжена переключателем режима управления по меньшей мере одним сельсином-датчиком дистанции между судами и дополнительным редуктором, причем сельсинприемник курса связан с сельсиномдатчиком дистанции посредством переключателя . режима управления,- а ротор указанного сельсина-датчика дистанции кинематически связан с валом барабана следящей лебедки посредством дополнительного редуктора.
Источники информации, принятые во внимание при экспертизе
КБерезин С.Я. и др. Система автоматического управления движением судов по курсу. Л., 1974, с.19
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1979 |
|
SU842725A1 |
| АВТОРУЛЕВОЙ | 1962 |
|
SU147104A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ «СИНИЦА» | 1966 |
|
SU179639A1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МАНЕВРОВ СУДНА | 1973 |
|
SU404100A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| АВТОРУЛЕВОЙ, РЕАЛИЗУЮЩИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН УПРАВЛЕНИЯ | 1968 |
|
SU213943A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Стабилизатор "нева" курса речных судов | 1976 |
|
SU615456A1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |