1
Известна система программного управления подземным электробульдозером в очистной камере рудника, содержащая блоки контроля прямолинейности движения, углов разворота Л1ашины от продольной оси камеры, управления исполнительными органами электробульдозера и вономогательнюй лебедки, набора nporpaiMMbT, операционный, счетчиК01В ЦЦ1КЛОВ, шага зах1вата, длины бульдозерования.
Предлагаемая система отличается от известных тем, что выходы операционного блока подключены на входы блоков контроля прямолинейности, углов разворота машины, управления исполнительными органами, а на его входы подключены выходы блоков автоматнческого переключения нолупрограмм, контроля углов разворота машины, счетчиков циклов, шага захвата, длины бульдозерования, причем входы блоков автоматического нереключения полупрограмм и счетчнков соедннены с блоком набора программы, а выход блока контроля прямолинейности - со входом блока управления иополнительпыми органами. Это позволяет осуществить безлюдную доставку руды из очистной камеры.
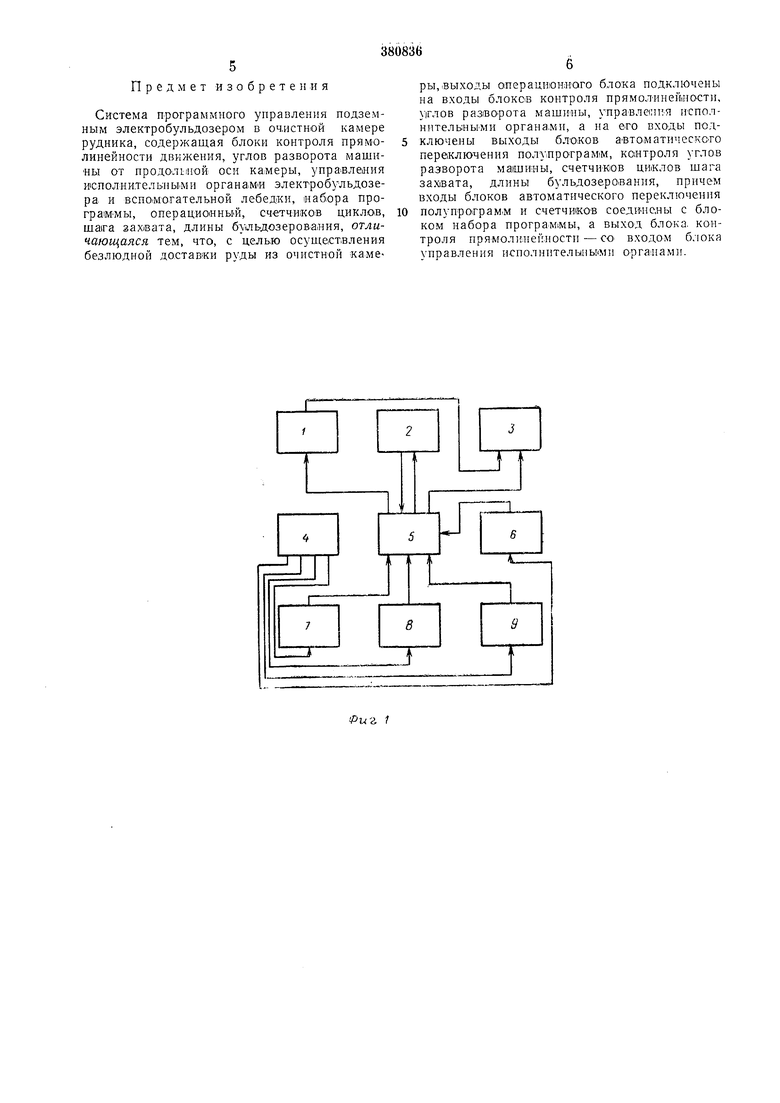
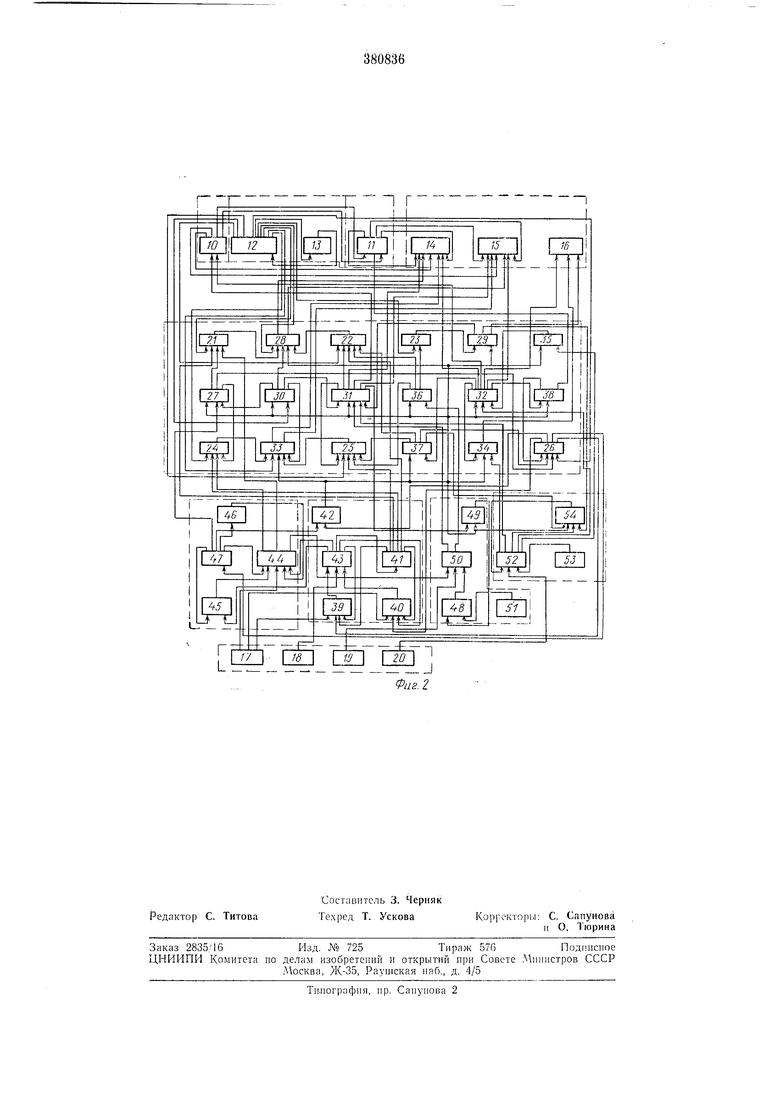
На фиг. 1 изображена структурная схема предлагаемой системы программного управления; на фиг. 2 - функциональная система программного управления.
Система содержит блок контроля прямолинейности движення бульдозера /, блок контроля углов разворота машины от продольной оси камеры 2, блок уиравлення нсполннтельными органами электробулъдозера и всномогательной лебедки 3, блок набора программы 4, операционный блок, вырабатываюнип команды на вынолиение заданной последовательности операций 5, блок автоматического
переключения полупрограмм 6, блок счетчика циклов 7, блок счетчика шага захвата 8, блок счетч1 ка длнпы бульдозерования 9.
Блок / включает в себя схему 10 контроля прямолинейности движения бульдозера на
прямых участках нутн и схему // корректировки его в направлении продольной оси камеры. Блок 2 включает схему 12 контроля углов разворота манппгы от продольной осн камеры и схему 13 контроля ее исходного полол ения. Блок 3 включает схему 14 н 13 управления ходовыми приводам,и бульдозера и схему 16 управлення вспомогательной лебедкой. Блок 4 Г5ключает переключатель 17 набора количества циклов правой и левой полупрограмм, переключатель 18 выбора первоначально отрабатываемой полуирограммы, 1переключатель 19 шага захвата и переключатель 20 длины бульдозерования. Блок 5 включает схемы совпадений, схемы 27 разрешения исполнення нервой команды, с.хемы
подачн команд на исполнение операц,нй, схемы 35--37 на|мяти, схему .6 блокировки контроля прямолинейности нри движении назад. Блок 6 включает схемы 39 и 40 совнадений, схемы 41 и 42 переключе1Ыгя полунрограмм и схему 43 сброса элементов онерационного блока. Блок / включает десятичиый счетчик 44, схему его блокировки носле отработки заданной программы ,и схемы 46 и 47 сброса. БлОК 8 ьключа.ет двоич но-десятичный счетчик 46, схему 4У ол.01 ировочного сброса его, схему 5U автоматического наран1,ивапия в каждом цикле проходимых участков пути, определяющих шаг захвата, датчик 51 шага захвата. Блок 9 включает двоичнодесятичный счетчик Ь2, датчик 53 длины булвдозерования и схему 54 блокировочного сброса счетчика.
Перед началом работв булвдозера оператор набирает программу, т. е. уста1 1а1вливает переключателв 18 в положение левой или правой полупрограммв, переключатель 17 - в полол ение требуемого количества циклов левой и правой полунрограмм, переключатель 19 - на требуемую величину шага захвата, переключатель 20 - на соответствующую длину булвдозерования.
Включение схемв 47 приводит через схемы 46 и 43 все элементы системв в .исходное состояние и запускает счетчик циклов 44. Он выдает сигнал па схему совпадений начала цикла выбранной шолупрограммы, например, полупрограммы 24. Схема 24 включает схему 33 на разворот бульдозера, есл;и бульдозер находится в исходиом положении (схема 12), выбрана полупрограмма {схема 41, разрешено исполнение первой команды (схема 27).
После ввиюлнен.ия первой операции - разворота на заданный угол - схема 12 коптроля углов разворота отключает схему 30 и включает схему 31 движения бульдозера вперед на длину, соответствуюшую шагу захвата.
Схема 31 производит разблокировку счетчика 48 шага захвата с помощью схемы 49, включение схемы 10 прямолинейности движения, включение двигателей бульдозера (схемы 14 и 15), включение маневрового тормоза лебедки (схема 16).
По прохождении определенного 1пути счетчик 48 шага захвата отключает схему 31 команды «вперед, которая в свою очередь отключает схему 10 контроля прямолинейности движения и включает схему 36 памяти, после чего блокируется схемой 49.
После этой операции срабатывает схема совнадений 22 обратного разворота при следующих условиях.
Бульдозер развернулся на заданний угол (схема 12), исполнена и запомнилась схемой 36 команда движения «вперед на длину, соответствуюшую шагу захвата, подтверждена выбранная полупрограмма (схема 41), отключена кома.нда «вперед (схема 31), не исполнилась команда «назад (схема 37).
После выполнения операции обратного разворота срабатывает схема совпадений 25 длины бульдозерования, если выполнена команда движения «вперед на длину, соответствующую шагу захвата (схема 36), и выполнен разворот в сторону продольпой осп камеры (схема 12).
Схема 12 через схему 29 включает схему 31 движения вперед на длину бульдозерования, схему 16 управления вспомогательной лебедки и схему 10 контроля прямолинейности движения.
При движении бульдозера вперед его прямолинейность контролируется схемами 11 и 12. Одновременно счетчик 52 вместе с датчиком 53 производит дискретный отсчет проходимого бульдозером пути и по достижении за.а,анно11 величины отключает схему 31 движения «вперед, схему 10 контроля прямолинейности движения, схему 16 управления вспомогательной лебедкой и подает сигнал на схему 35 памяти, после чего блокируется схемой 54.
Схема 35 памяти исполнения команды на
бульдозерование включает схему 32 команды «назад, которая в свою очередь включает схемы 14-16 управления исполнительными органами и схемой 54 разблокирует счетчик длины бульдозерования.
По приходу бульдозера в исходное положение счетчик длины бульдозерован,ия отключает двигатели бульдозера и лебедки, снова блокируется схемой 54.
При снятии команды «назад (схема 32) снимается блокировка контроля прямолинейности движения (схема 38), что позвол1яет бульдозеру скорректировать свое положение по продольной оси камеры. По окончании корректировки срабатывает схема совпадений конца цикла (схема 26), подающая сигнал па схему 43 сброса элементов операционного блока и па запись в счетчик циклов, который в свою очередь подает команду на воепроизведеппе следующего цикла.
После отработки установлешюго числа циклов выбранной полупрограммы срабатывает схема совпадения 40 нри следующих условиях.
Подтверждепа выбрапная полупрограмма (схема 41), отработано установленное количество циклов выбранной полупрограммы (схема 18) и выполнен последний цикл выбранной полупрограммы (схема 54).
Схема 54 сбрасывает счетчик циклов 44, за1нисывает исполпение выбранной полупрограммы счетчик 46 и переключает на другую полунрограмму. По окончании ее отработки срабатывает схема совнадений 39, которая сбрасывает счетчик циклов и записывает исполнение второй нолупрограммы в счетчик 46.
Последним дается запрет на счетчик циклов, остающийся на нем до повторного нал :атия кнопки «пуск.
Предмет изобретения
Система программного управления подземным электробульдозером в оч.истной камере рудника, содержащая блоки контроля прямолинейности движения, углов разворота машины от продОЛ1;11юй оси камеры, управления исполнительиы.ми органамИ электробульдозера и всно-могательной лебедки, набора программы, операциоянЫй, счетчиков циклов, шага захвата, длины бушьдозерования, отличающаяся тем, что, с целью осуществления безлюдной до.ставки руды из очистной камеры,выходы операциюни-аго блока подключены на входы блокО|В контроля прямол-ннейлости, У1ГЛОВ раз(ворота машины, упраВле1;пя исполннтельнЫМи органа.мн, а на его входы подключены выходы блоков аБтоматимескОГО переключения полу.прОГрамм, контроля углов разворота машины, счетчиков циклов шага зах1вата, длины бульдозерования, причем входы блоков автоматического переключения полупр01грам-м и счетчиков соединены с блоком набора програм1мы, а выход блока, контроля прямолинейности - со входом блока управления исполнителыпьгаш органами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ НЕУРАВНОВЕШЕННОСТИ | 1971 |
|
SU310150A1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| ЦИФРОВОЙ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU297071A1 |
| ШАГОВЫЙ ГРАФОПОСТРОИТЕЛЬ | 1970 |
|
SU267216A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1980 |
|
SU935628A2 |
| ЦИФРОВОЕ УСТРОЙСТВО РЕГУЛИРОВАНИЯ СООТНОШЕНИЯ СКОРОСТЕЙ КЛЕТЕЙ НЕПРЕРЫВНЫХ ПРОКАТНЫХ СТАНОВ | 1972 |
|
SU338277A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГОМНОГОКАНАЛЬНОГО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯДЕФОРМАЦИЙ ПОДВИЖНЫХ ДЕТАЛЕЙ | 1972 |
|
SU428804A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1981 |
|
SU968454A1 |
rzn
