Изобретение относится к области транспортирования, установки и съема грузов в различного рода складах, приводных и неприводных транспортирующих устройствах, гравитационных рольгангах « т. inИзвестны автоматические штабелеры для транспортирования и укладки грузов в стеллажи складов, а также съема грузов со стеллажей, вьгпо.тненные в виде напольного или подвесного устройства и содержаш;не тележку с при водом горизонтального перемещения и подъемную каретку со смонтированной на ней выдвижной грузовой -площадкой для установки и съема груза. Эти щтабелеры снабжены различного рода бесконтактными электронными устройствами автоматического управления. Вследствие большой инерционности механизмов горизонтального перемещения выбеги щтабелеров при их адресовании к заданным ячейкам стеллажей (при установке щтабелера против избранной ячейки) достигают значительных величин, что приводит к ухудщению использования площади склада и нео-бходи.мости увеличения его габарнтов.
Для повышения точности остановки в известных штабелерах применяют, например, способ импульсной доводки лр« использовании привода переменного тока. Однако работа привода щтабелера в течение длительного времени в этом режиме приводит к недопустимому перегреву двигателя пусковыми токами.
Для новыщения точности остановки щтабелера в месте адресования, а также повыщения надежности работы щтабелера, ограничения длительности режима импульсной доводки, улучшения теплового режима двигателя и исключения влияния помех при импульсной доводке щтабелера согласно изобретению устройство содержит дещифратор, схему совпадений и формирователь импульсов с регулируемой скважностью, цепь запуска формирователя импульсов подключена к выходу схемы совпадения, один вход которой
соединен через дещифратор с выходом счетчика горизонтального адреса, а второй вход подключен к выходу датчика положения точной остановки.
Для исключения влияния помех на адресные счетчики во время импульсной доводки после исполнения адреса триггеры счетчиков адреса подключены к схеме принудительной установкн счетчиков в «нулевое положение. Управление всеми механизмами щтабелера
осуществляется автоматически. Схема управv eния штабелером выполнена на транзисторных логических элементах и позволяет производить автол1атическое адресование щтабелера к заданной ячейке стеллажа, где храняттребуемой ячейки складывается из адресов по горизонтали и вертикали, задание адреса осуществляется автоматически или вручную с помощью переключателей адреса. При автоматическом вводе яиформаЦИи используются закладываемые в считывающий аппарат перфокарты, да которых имеется двоичный код, соответствующий задаваемому адресу.
В з ависимости от наз.начения штабелер может работать либо в загрузочном, либо в разгрузочном циклах, отличие в работе штабелера состоит лишь в порядке выполнения действий по установке и съему контейнера.
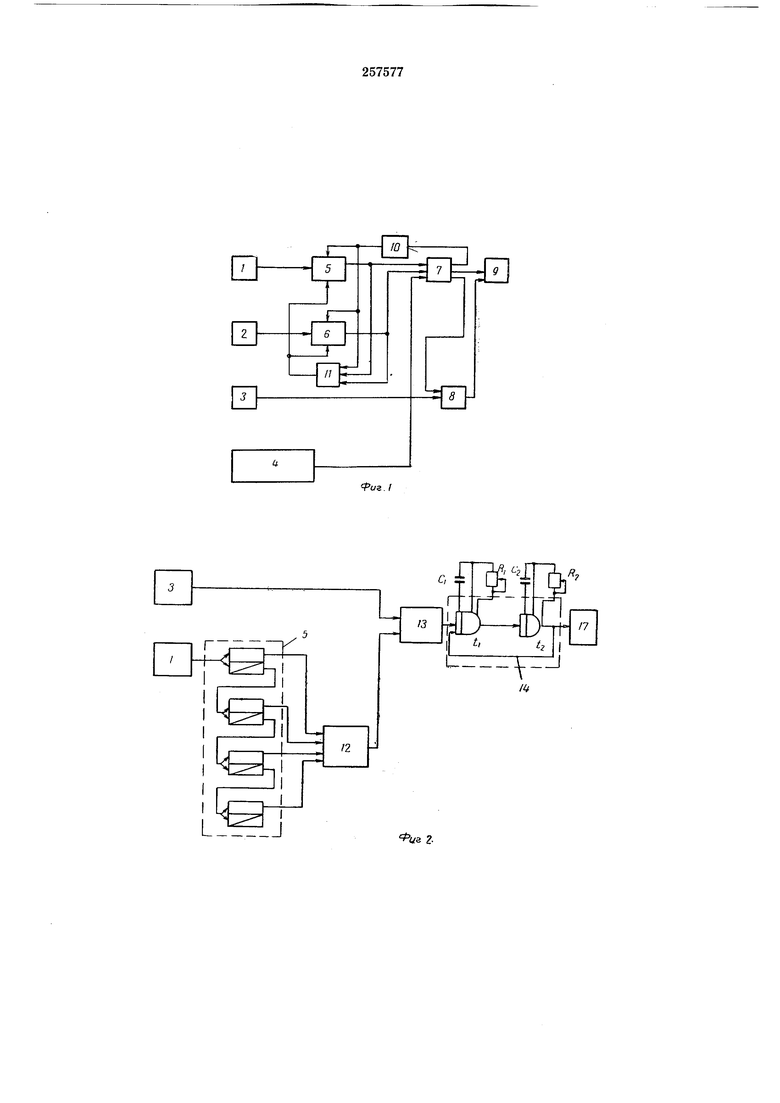
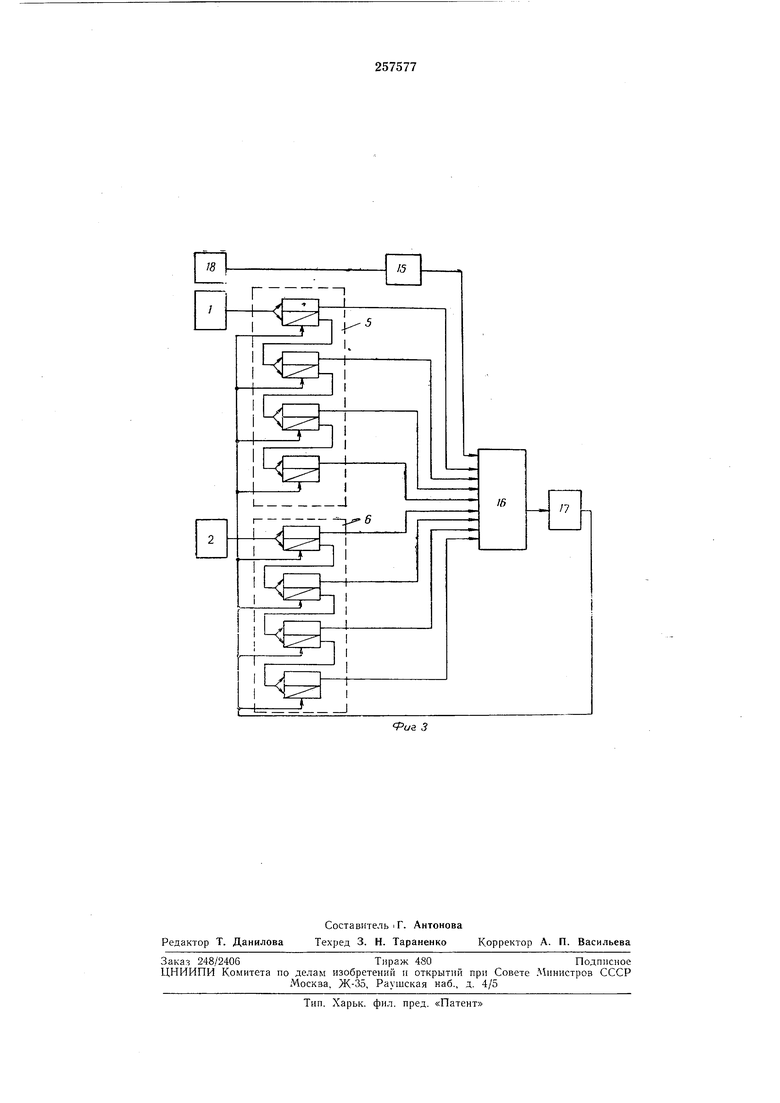
На фиг. 1 представлена структурная схема управления щтабелером; на фиг. 2 - структурная схема импульсной доводки; на фиг. 3 - схема принудительной установки триггеров в «нулевое положение.
Схема управления штабелером содержит датчики / и 2 горизонтального и вертикального адресов, датчик 3 положения точной остановки, блок 4 датчиков положения механизмов штабелера, двоичные счетчики 5 и 6 горизонтального и вертикального адресов соответственно, логическую схему 7 управления штабелером, схему 8 импульсной доводки штабелера, схему 9 формирования команд на управление механизма-ми штабелера, схему 10 ввода адресной информации в двоичные счетчики адреса и схему 11 принудительной установки триггеров счетчиков адреса IB «нулевое положение.
Схема импульсной доводки (фиг. 2) содержит дешифратор 12, вход которого подключен к выходу двоичного счетчика горизонтального адреса, схему 13 совпадения, один вход которой подключен к выходу дешифратора 12, а второй вход - к выходу датчика 3 положения точной остановки, и формиров:атель 14 имиульсов с регулируемой скважностью. Формирователь 14 импульсов вьтолнен на двух элементах времени «транзисторная задержка по схеме мультивибратора с внешней регулирующей цепью (элементы RiCi и R2C2), позволяющей изменять скважность импульсов «а выходе этого формирователя, который соединен со входом схемы 9, формирующей команду на включение привода горизонтального перемещения штабелера.
Схема принудительной установки триггеров в «нулевое положение (фиг- 3) содержит инвертор 15, вход которого соединен с выходом схемы 10 ввода адресной информации в двоичные счетчики 5 и 6 горизонтального и вертикального адреса; схему 16 совпадения, входы которой соединены с выходом инвертора /5 и с выходами этих двоичных счетчиков, и инвертор 17, вход которого соединен с выходом схемы 16 совпадения. К выходу инвертора 17 подключены установочные входы двоичных счетчиков 5 и 5 горизонтального и вертикального адреса.
Когда на загрузочном столе имеется контейнер и все механизмы штабелера приведены в исходное полож1вние, то включаются соответствующие датчики блока 4 структ рной
5 схемы управления. Сигналы этих датчиков поступают в логическую схему 7, благодаря чему в схему 9 формируется сигнал на перемещение грузовой площадки щтабелера. При перемещении грузовая площадка заходит под
контейнер, установленный на загрузочном столе. Затем каретка с выдвинутой грузовой площадкой поднимается, причем контейнер снимается с загрузочного стола, после чего грузовая площадка с .взятым контейнером
5 возвращается в исходное положение.
Все команды на перемещение механизмов в этот период формируются в схеме 9, получающей сигналы от логической схемы 7, работа которой обусловлена положением датчи0 ков блока 4.
При возвращении грузовой площадки в исходное иололсение после «установочного перемещения каретки, т. е. с выдвинутой грузовой площадкой, от логической схемы 7
5 поступает импульс в схему 10 ввода информации в двоичные счетчики 5 и 6 горизонтального и вертикального адреса.
Адресная информация в эти двоичные счетчики проводится автоматически параллельным дополнительным кодом. Исполнение заданного по горизонтали или по вертикали адреса фиксируется переполнением соответствующего двоичного счетчика 5 или 6. После ввода информации на выходе этих счетчиков, которые до этого находились в «нулевом положении, появляются сигналы «Ь, подаваемые в логическую схему 7; от этих сигналов схема 9 формирует команды на тележки штабелера внеред и неремещение каретки вверх.
При движении штабелера к заданному адресу от датчика / горизонтального адреса, взаимодействующего со счетными пластинами горизонтального адреса, установленными на пути штабелера, поступают путевые импульсы в двоичный счетчик 5 горизонтального адреса. При движении каретки вверх датчик 2 вертикального адреса
50 взаимодействует со счетными пластинами. При этом путевые импульсы от этого датчика поступают на вход двоичного счетчика 6 вертикального адреса, доводя его до переполнения при взаимодействии с Счетной пластиной, соответствующей заданному по вертикали адресу. При взаимодействии датчика со счетной пластиной, предшествующей заданному по горизонтали адресу,, возникает путевой импульс, доводящий двоичный счетчик
0 до переполнения. вследствие отсутствия сигнала на ввод информации схемы 10 в момент перенолнения двоичиых счетчиков о и б с выхода инвертора 15 на один из входов схемы 16 совпадения также поступает сигнал При этих условиях с выхода схемы 16 на вход иивертора 17 иодается сигнал «1, а с выхода этого инвертора на установочные входы триггеров двоичных счетчиков 5 и (J - сигнал «О, который фиксирует их в «нулевом иоложеиии. При переполнипп двоичного счетчика 5 горизонтального адреса в логической схеме 7 формируется -сигнал перехода штабелера на пониженную скорость, при этом переходе и на этой скорости штабелер наезжает на счетную пластину заданного горизонтального адреса. При этом срабатывает датчик 3 положения остановки и иодает сигна.ч «1 в схему и.мпульсной доводки на один вход схемы совпадения 13. Па другом входе схемы совпадения в момент срабатывания этого датчика уже имеется сигиал «1, поступивший при переполнении двоичного счетчика 5 горизоитального адреса. В результате на выходе 13 совпадения возникает сигнал «1, который подается в цепь запуска форлгирователя 14 импульсов, формирователь 14 запускается, и импульсы с его выхода поступают в командный блок. Таким образом, при срабатывании датчика 3 положения точной остановки начинается режим импульсной доводки штабелера, причем длительность импульсной доводки огр.аиичивается временем взаимодействия этого датчика со счет-ной пластиной горизонтального адреса, и, таким образом, только длиной этой счетиой пластины, определяется режи.г доводки при заданной скорости штабелера. Триггеры двоичиых счетчиков 5 и 6 в период импульсной доводки жестко фиксированы в «нулевом положении при помош,и схемы 11. Скважность импульсов, снимаемых с выхода формирователя 14 иМПульсов (фиг. 3), с помощью элел ентов настройкиподбирается таким образолг, что электродвигатель привода горизоитального перемещения во импуотьсной доводки ра ботает в режиме, при котором за время паузы между импульсами этот привод вследствие инерционности механизма горизоитальиого пepe reщeния не успевает затормозиться. Средняя скорость щтабелера при этом снижается приблизительно до половины от поминальной, и иусковые токи зиачительио уменьшены по отношению к номинальным. Эти обстоятельства исключают перегрев двигателя горизонтального перемещения. о отношению к заданной ячейке стеллажа. ри полной остановке каретки и тележки табелера сигнал через формирователь импульсов Подается в блок 17 на перемещение грузовой площадки; после выдвижения грузовой площадки каретка опускается и контейнер, таки.м образом, ставится на стеллаж, а грузовая площадка возвращается в исходное положение. Все команды на перемещение механизмов щтабелера у избранной ячейки стеллажа, как и в случае работы штабелера у загрузочного стола, формируются в командном блоке 17, получающем сигналы от датчиков блока 4 через логическую схему 7. При возвращении грузовой площадки в походное положение, после установки контейнера в заданную ячейку стеллажа, от логической схемы 7 подается сигнал в блок 17 на формироваи1 е команды возвращения тележкп и каретки щтабелера в исходное положенпе у загрузочиого стола; происходит опускание каретки п движение тележки штабелера назад. Одновремеино подается команда на смену перфокарты в считывающем аппарате. При подходе штабелера к месту загрузки срабатывает один из датчиков блока 4, переводя штабелер с основной скорости на пониженную. При взаимодействии датчика 3 положения точной остановки с пластиной точной остановки, установленной у загрузочного стола, этот датчик включает схему 8 импульсной доводки. Штабелер нмпульсно доводится до положения точной остановки. В дальнейшем цикл может иовторитьСя в аналогичной иоследовательностп при иаличип очередного контейнера на загрузочном столе. Предмет изобретения Устройство для автоматического управлеНИЯ штабелером, содержащее блок автоматического адресования со счетчиками горизонтальных и вертшчальньгх адресов и схемой совпадения, датчик положения тележки щтабелера. приводы горизонтального и вертикального перемещений, блок импульсной доводки и командный блок, от.щчающееся тем, что, с целью повышения точности остановки штабелера в месте адресования, блок и гпульсной доводкц содержит формирователь импульсов с регулируемой скважностью, дешифратор и схему совпадения, причем один из входов схемы совпадения соединен через дешифратор со cчeтчикo r горизоиталыюго адреса блока автоматического адресования, другой вход схемы совпадения соединен с датчиком положения тележки, а выход подключен к формирователю импульсов, связаиГ
V -2 1
4D
/if
Sbae г

| название | год | авторы | номер документа |
|---|---|---|---|
| ШТАБЕЛЕР ДЛЯ ПЕРЕМЕЩЕНИЯ УСТАНОВКИ И СЪЕМАГРУЗОВ | 1970 |
|
SU268993A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| ШТАБЕЛЕР ДЛЯ ПЕРЕМЕЩЕНИЯ, УСТАНОВКИ И СЪЕМА ГРУЗОВ | 1969 |
|
SU250023A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1970 |
|
SU287579A1 |
| Устройство для автоматического управления штабелером | 1975 |
|
SU557375A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ И УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 1970 |
|
SU276795A1 |
| ШТАБЕЛЕР ДЛЯ ПЕРЕМЕЩЕНИЯ, УСТАНОВКИ И СЪЕМА ГРУЗОВBtttUtUolifl?! | 1969 |
|
SU254390A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| Устройство для автоматического управленияшТАбЕлЕРОМ | 1978 |
|
SU819811A2 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |