(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU763851A1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Следящая система | 1986 |
|
SU1472871A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Следящая система | 1975 |
|
SU545969A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1989 |
|
SU1615671A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
1
Изобретение относится к следящим системам с бесконтактными двигателями постоянного тока и нелинейными корректирующими усщюйствамн и может быть использовано для повышения их точности и устойчивости.
Известны следящие системы с бесконтактными двигателями постоянного тока и не1шиейными корректирующими устройствами, в состав KOTOpbix входят выпрямители, фазоопережаюидий фильтр, тахогенератор и сумматор 1.
Однако такие системы имеют низкие точность и устсшчивость, так как склониы к гютокопебаниям в режиме вынужденных движений.
Наиболее близкой к предлагаемой по технической сущности является система, содержащая последовательно соединенные измеритель рассогласования, усилитель, первый выпрямитель, первое сравнивающее устройство, первый сумматор, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока и редуктор и последовательно соединенные фазоопережающнй фильтр, реле реверса и блок умножения, выход которого соединен с вторым входом первого сумматора, выход реле реверса
соединен с вторым входом бесконтактного двигателя постоянного тока, подключенного свш1М выходом к входу тахогенератора, а выход усилителя соединен с входом фазоопережаюшего фильтра.
Недостаток этой системы также состоит в ее низких точности и устойчивости, обусловленных автоколебаниями в режиме вынужденных движений.
Цель изобретения - повышение точности и
to устойчивости системы.
Эта цель достигается тем, что следящая система содер)1О1Т второе сравнивающее устройство и последовательно соединенные дифференцирую Sщее звено и второй выпрямитель, выход которого соединен с вторым входом первого сравнивающего устройства, вход дифференцирующего звена соединен с выходом тахогенератора н через второе сравнивающее устройство с вторым
20 входом блока умножения, а выход - с вторым входом второго сравнивающего устройства.
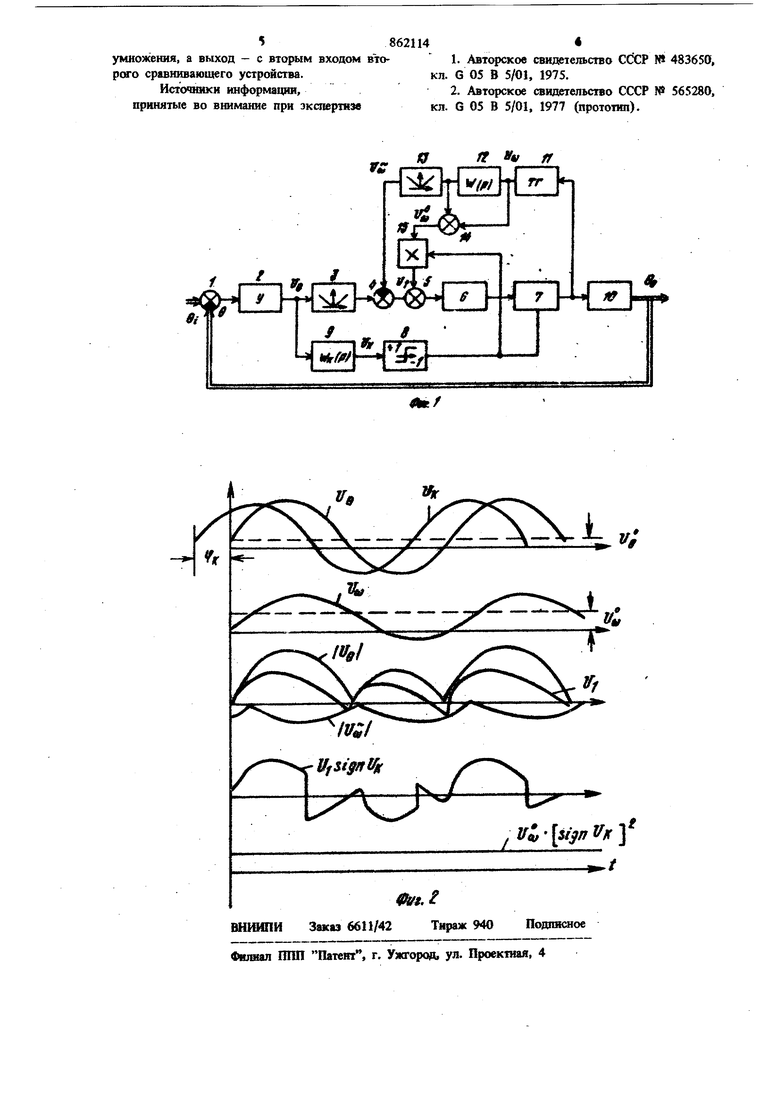
На фиг. 1 представлена структурная схема предлагаемой следящей системы; на фиг. 2
показаны сюновные эпюры. сигналов системы при обработке линейно нарастающего сигнала.
На фигурах и в тексте описания приняты следующие обозначения: в ,9,9Q - рассогласование, входной и выходной углы системы;
U , l|, ш напряжение тахогенератора, его переменная и постоянная составляющие;
и - , и - напряжение на выходе У и первого сравнивающего устройства;ид - напряжение на входе БЛЛТ.
Измеритель рассогласования I выявляет и преобразует в напряжеш е рассогласование 9 , которое усиливается усилителем 2, выпрямляется выпрямителем 3 и через первое сравнивающее устройство 4 и первый сумматор 5 поступает на вход широтно-импульсного модулятора 6, формирующего импульсы бескомтактного двигателя постоянного тока 7. Реле реверса 8 через фазоопережающий фильтр 9 подключено к выходу усюштеля 2, а вал двигателя через редуктор 10 соединен с вторым входом измерителя рассогласования 1. На валу двигателя укреплен тахогенератор 11, который через дифференцирующее звено 12 и второй выпрямитель 13 подключен к второму входу первого сравнивающего устройства 4. Вход и выход дифференцирующего звена подключен к входам второго сравнивающего устшэйства 14 выход которого подключен к входу вдока умножения 15. На другой вход блока умножения 15 подключен выход реле реверса двигателя, в его выход - к второму входу сумматора 5.
Система работает следующим образом.
При обработке скачкообразных входных сиг налов напряжение Ц) тахогенератора содержит лишь переменную (колебательную) составляющую и и по цепи тахогенератор 11-звено-12-вьтрямнтель 13 осуществляется гибкая отрицательная скоростная обратная связь, которая, как известно, уменьшает перерегулировани время переходного процесса, т. е. потыщает устойчивость и динамическую точность системы В режиме слежения, например, при линейно изменяющемся входе снгнала все внутренние координаты системы в общем случае содержат постоянную и переменную составляющие (см. фиг. 2, координаты U , U, ).
Компоненты U разделяются дифференцирующим звеном 12 и сравниваются устройством 14. Прн этом по цепи тахогенератор 11-звено.-12 - вьшрямитель 13 по-прежнему осуществляется гибкая отрицательная обратная связь, повыщающзя устойчивость системы. Через цепь тахсмгенератор И - звено 12 - сравнивающее устройство 14 - блок умножения 15 - сумматор 5 осуществляется положительная обратная скоростная связь, но лшиь дпя средней составляющей, т. е. средней скорости.
Действительно, компонента Цц) 1цваждь1, умножается на 8ign UK - вначале в блоке 15, а затем в коммутаторе двигателя, благодаря действию реле реверса. Поэтому напряжение на двигателе, обусловленное компонентной и (см. фиг. 2), равно
-1,0 .,., II л1.
,,
. т. е. через указанные цепи выполняется положительная обратная связь. Эта связь как известно повышает статический коэффициент передачи двигателя и, следовательно, точность системы в целом.
Таким образом, особенность предлагаемой системы состоит в том, что в ней осуществляются одновременно две скоростные обратнь{е связи - отрицательная ( дпя переменной составляющей Uj) и положительная (дпя постоянной составляющей Уц;). При этом первая из них повышает устойчивость и динамическую точность при скачкообразных входных сигналах.
В режимах слежения одновременно действую обе цепи, в результате чего повышается устойчивость и точность вынужденных движений.
Все элементы логического блока управления системы могут быть выполнены на интегральных микросхемах и RS-элементах, что позволяет сделать их миниатюрными.
Формула изобретения
Следящая система, содержащая последовательно соединенные измеритель рассогласования, усилитель, первый выпрямитель, первое сравнивающее устройство, сумматор, щиротно-импульсный модулятор, бесконтактный двигатель постоянного тока и редуктор и последовательно соединенные фазоопережающий фильтр, реле реверса и блок умножения, выход которого соединен с вторым входом сумматора, выход реле реверса соещшен с вторым входом бесконтактного двигателя постоянного тока, подкл 9ченного свсжм выходом к входу тахогенератора, а выход усилителя соедшкн с входом фазоопережающего фильтра, отличающаяся тем, что, с целью повьпиения точности и устойчивости системы, ста содержит второе сравнивающее jrcrpt TBo и последовательно стдииениые дифференшрующее звено и второй вылряАШтель, выход которого соединен с втой рым входом первото сравниваняцего устройства, вход дифференцируинцего звена соединен с выходом тахогенератора и через второе сравнивающее устрЫ1ство с вторым входом блока
862114«
умножения, а выход - с вторым входом вто- 1. Авторское свидетельство CdCP N 483650,
рщ-о сравнивающего устройства. Источники информации, принятые во внимание при экспертизе
кл. G 05 В 5/01, 1975,
