1
Изобретение относится к промышленному транспорту, в частности к грузоподъемникам для обслуживания высоких складов.
В известных грузоподъемниках для обслуживания высоких складов, включающих самоходную раму с установленными на ней подъемным механизмом и выдвижными с помощью цепных передач телескопическими стойками, несущими грузовую платформу, ввиду отсутствия дополнительных телескопических стоек, связанных с грузовой платформой, грузоподъемность последней недостаточно высокая.
Цель изобретения - увеличение грузоподъемности и производительности грузоподъемника.
Это достигается тем, что грузоподъемник снабжен дополнительной парой телескопических стоек, связанных с грузовой платформой, причем каждая стойка состоит из неподвижной штанги, центральной подвижной щтанги и верхней подвижной штанги, а подъемный механиз выполнен в виде двух закрепленных на самоходной раме, связанных выравнивателем давления, горизонтальных, противоположно направленных гидроцилиндров, щтоки кал дого из которых соединены с передаточными осями, несущими на обоих концах уравновешивающие тележки, каждая из которых снабжена парой роликов, подвижно установленных в направляющих самоходной рамы, и подвижные ролики полиспаста, каждый из которых взаимодействует с цепью, расположенной в неподвижной щтанге телескопической стойки и закрепленной одним концом на раме, а вторым - через направляющий ролик на подвижной центральной штанге, связанной цепной передачей с верхней подвижной штангой, .соединенной цепью с грузовой платформой. В таких грузоподъемниках для транспортирования плит целесообразно гидроцилиндры, передаточные оси и подвижные ролики полиспаста размещать в боковых пазах самоходной рамы.
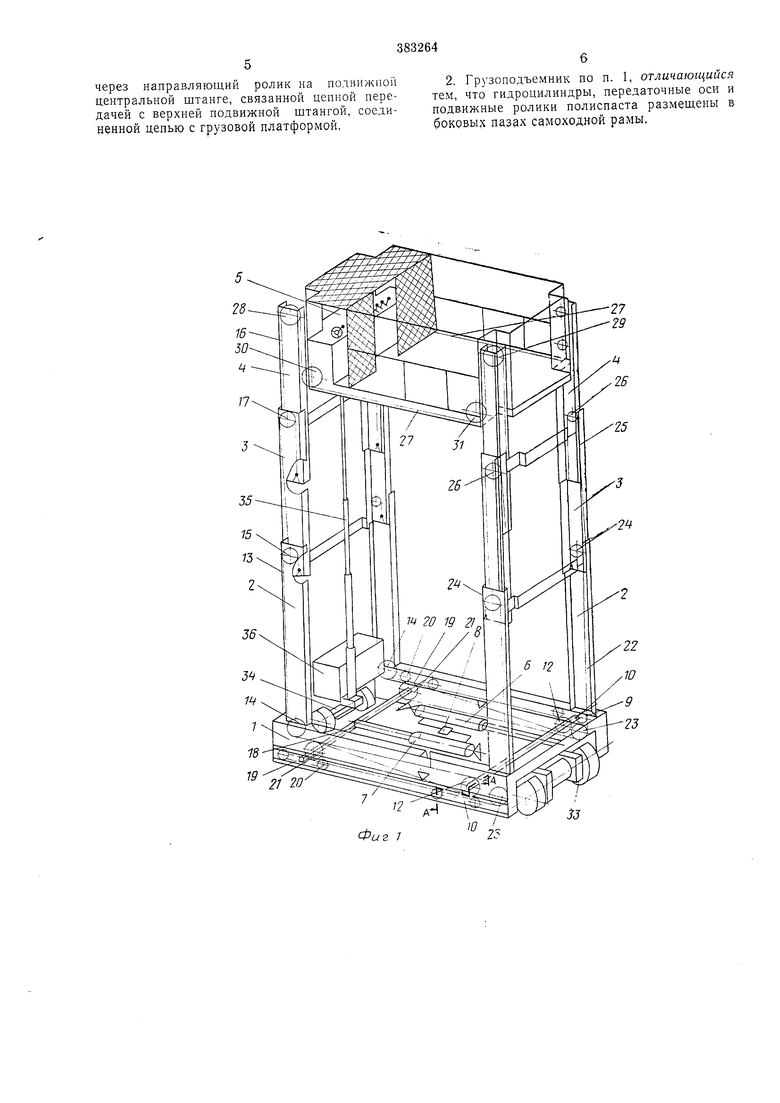
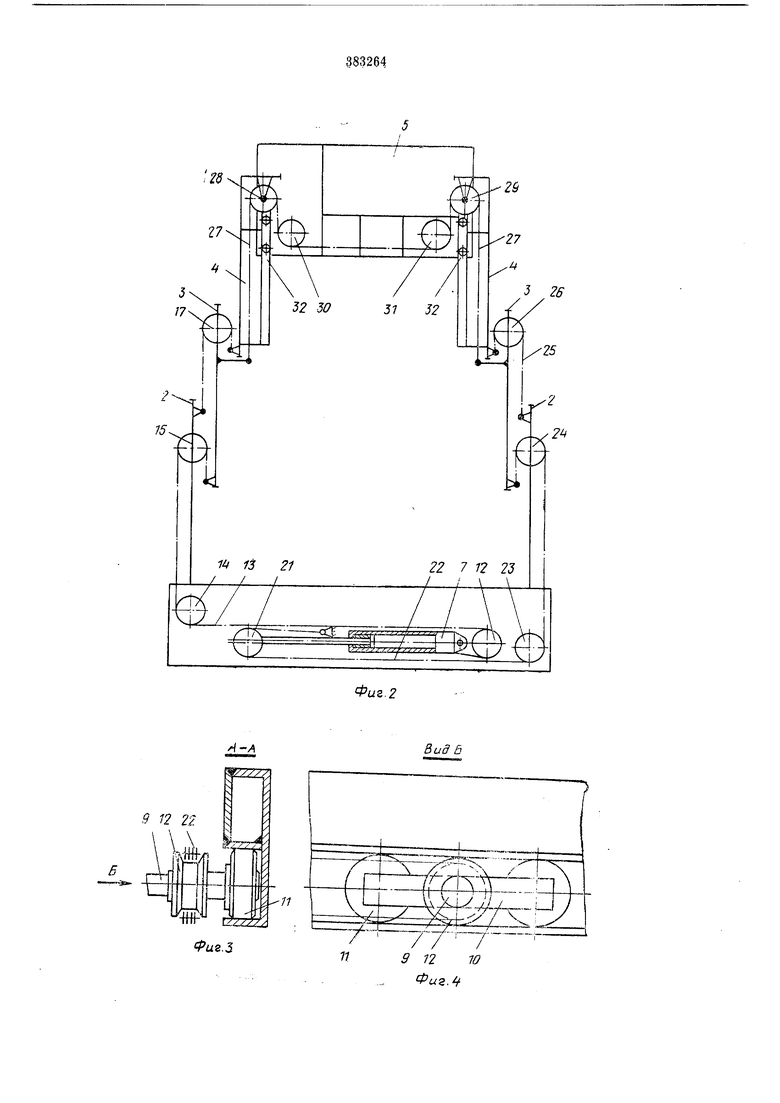
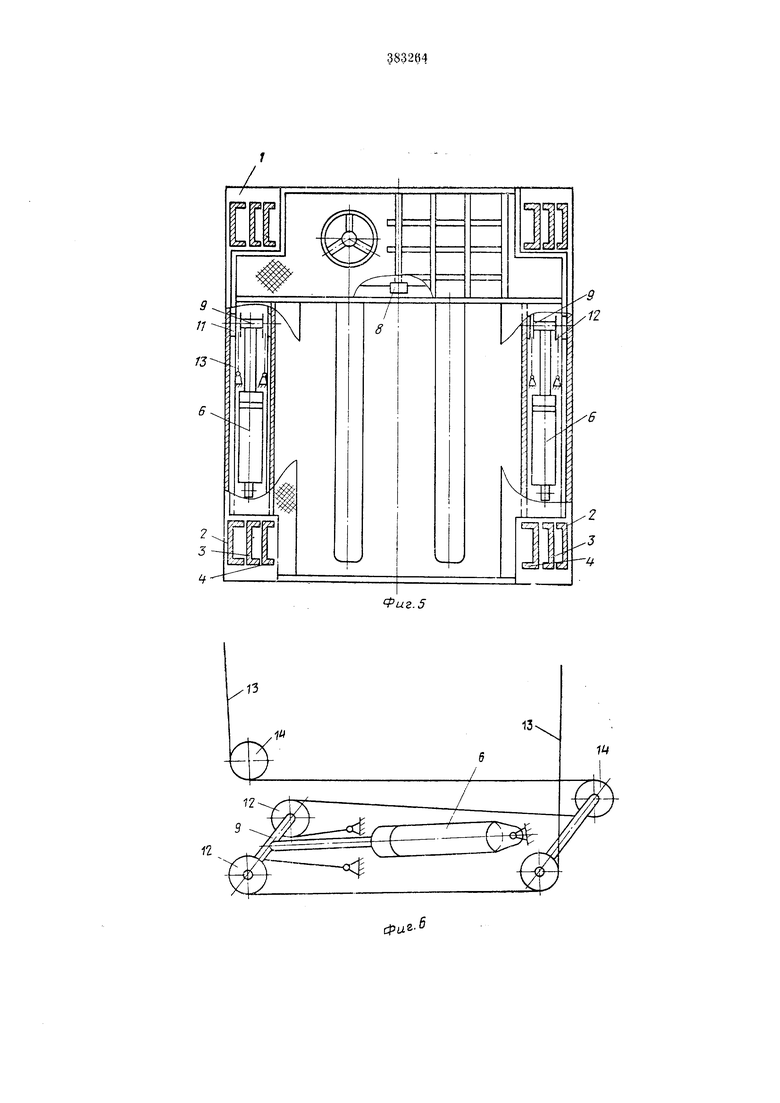
На фиг. 1 схематически представлен предлагаемый грузоподъемник, общий вид; на фиг. 2 - кинематическая схема грузоподъемника; на фиг. 3 - разрез по А-А на фиг. 1; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - вариант исполнения грузоподъемника с расположением гидроцилиндров передаточных осей и подвижных роликов полиспаста в боковых пазах самоходной рамы, вид сверху; фиг. 6 иллюстрирует конструктивные особенности предлагаемого грузоподъемника.
Грузоподъемник содержит самоходную раму 7 с установленным на ней подъемным механизмом телескопических стоек и дополнительных телескопических стоек, состоящих каждая из неподвижной штанги 2. подвижной
центральной штанги 3 и верхней подвижной штанги 4. Все верхние подвижные штанги соединены с грузовой платформой 5. Подъемный механизм телескопических стоек состоит из закрепленных на раме / горизонтальных противоположно направленных гидроцилиндров 6 и 7,, соединенных между собой выравнивателем 8 давления. Шток гидроцилиндра 6 соединен с передаточной осью 9, несущей на концах уравновешивающие тележки 10, снабженные парой роликов 11, подвижно установленных в направляющих самоходной рамы 1, и подвижные ролики полиспаста 12, взаимодействующие с цепью 13, один конец которой неподвижно закреплен на раме /. Цепь 13, огибая укрепленные на раме ролики 14 и укрепленные в верхней части неподвижных щтанг 2 ролики 15, соединяется вторым концом с нижней частью центральной подвижной щтанги 3. В верхней части неподвижной штанги 2 неподвижно закреплен один конец цепи 16, которая, огибая укрепленный в верхней части центральный неподвижной щтанги 3 ролик 17, закрепляется другим концом в нижней части верхней подвижной штанги 4. ,
Аналогичным образом шток гидроцилиндра 7 соединен с передаточной осью 18, несущей на концах тележки 19 с роликами 20 и подвижными роликами полиспаста 21, взаимодействующие с цепью 22, огибающей ролики 23 и 24, один конец которой закреплен на раме /, а второй - в нижней части центральной подвижной щтанги 3 дополнительной телескопической стойки. Цепь 25 закреплена одним концом в верхней части неподвижной штанги 2 дополнительной телескопической стойки, а вторым концом, огибая ролик 26, - в нижней части верхней подвижной щтанги 4 дополнительной телескопической стойки.
В верхней части центральных подвижных штанг 3 телескопических стоек и центральных подвижных штанг 5 дополнительных телескопических стоек неподвижно закреплены концы цепи 27, проходящей через верхние подвижные щтанги 4 и огибающей ролики 28 и 29, установленные в верхней их части, а также ролики 30 и 31, закрепленные у основания грузовой платформы 5. На грузовой платформе установлены также две пары роликов 32, взаимодействующих с направляющими верхних подвижных щтанг 4. На самоходной раме / установлены задний ведущий мост 33 и передний ведомый мост 34, на котором установлен раздвижной ведущий элемент 35. На раме установлен также электрический шкаф 36. Пульт управления и место водителя находятся на грузовой платформе.
Грузоподъемник работает следующим образом.
При включении гидроцилиндров 6 vi 7, соединенных выравнивателем 8 давления, их штоки приводят в движение передаточные оси с закрепленными на. концах уравновещивающими тележками, ролики которых перемещаются в направляющих самоходной рамы /, и
подвижные ролики полиспаста. Шток гидроцилиндра 6 приводит в движение передаточную ось 9 с уравновещивающими тележками 10, снабженными роликами //, и подвижными блоками полиспаста 12. Шток гидроцилиндра 7 приводит в движение передаточную ось 18 с тележками 19, снабженными роликами 20, и подвижными блоками полиспаста 21. Блоки 12 приводят в движение цепь 13, а блоки 21- цепь 22. При движении этих цепей выдвигаются центральные подвижные щтанги 3. Через цепи 16 и 25, огибающие соответственно ролики /7 и 26, укрепленные в верхней части центральных подвижных щтанг, движение последних передается верхним подвижным штангам 4, которые, в свою очередь, через цепь 27 и ролики 28-31 передают вертикальное перемещение грузовой платформе 5. Таким образом, при одновременной работе цепей 13 и 22, 16 VI 25 к 27 скорость перемещения грузовой платформы в 6 раз превыщает скорость движения порщней цилиндров.
На самоходной ра.ме могут быть расположены грузовая платформа вильчатого типа и телескопические стойки. При этом гидроцилиндры 6, передаточные оси 9 и подвижные ролики полиспаста 72 располагаются в боковых пазах самоходной рамы 1, а каждый гидроцилиндр 6 приводит в движение одну телескопическую стойку, расположенную впереди самоходной рамы, и одну дополнительную телескопическую стойку, расположенную сзади. Грузоподъемник такой конструкции (см. фиг. 5 и 6) позволяет транспортировать плиты, так как вилка может опускаться на пол.
Предмет изобретения
1. Грузоподъемник для обслуживания высоких складов, включающий самохо.:и1ую с установленными на ней нодъемным механизмом и выдвижными с помощью цепных передач телескопическими стойка.ми, несущими грузовую платформ}, отличающийся тем, что, с целью увеличения грузоподъемности и производительности, грузоподъемник снабжен дополнительной парой телескопических стоек, связанных с грузовой платформой, причем каждая стойка состоит из неподвижной щтанги, центральной подвижной щтанги и верхней подвижной щтанги, а подъемный механизм выполнен в виде двух закрепленных на самоходной раме, связанных выравнивателем давления, горизонтальных, противополои-спо направленных гидроцилиндров, щтоки каждого из которых соединены с передаточными осями, несущими на обоих концах уравновешивающие .тележки, каждая из которых снабжена парой роликов, подвижно установленных в направляющих самоходной рамы, и подвижные ролики полиспаста, каждый из которых взаимодействует с цепью, расположенной в неподвижной штанге телескопической стойки и закрепленной одним концом на раме, а вторым -
через направляющий ролик на подвижной центральной штанге, связанной цепной передачей с верхней подвижной штангой, соединенной цепью с грузовой платформой,
2. Грузоподъемник по п. 1, отличающийся тем, что гидроцилиндры, передаточные оси и подвижные ролики полиспаста размеш,ены в боковых пазах самоходной рамы,
| название | год | авторы | номер документа |
|---|---|---|---|
| Двойная телескопическая подъемная установка для электропогрузчиков с повышенным обзором | 1981 |
|
SU1219522A1 |
| УСТРОЙСТВО для БОКОВОГО ПЕРЕМЕЩЕНИЯ ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 1971 |
|
SU320988A1 |
| СТРЕЛОВОЙ ПОВОРОТНЫЙ КРАН | 1973 |
|
SU406344A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2006453C1 |
| Механизированная линия резки листового проката | 1979 |
|
SU946823A1 |
| САМОХОДНАЯ МОНОРЕЛЬСОВАЯ ТЕЛЕЖКАФУ^гД | 1971 |
|
SU423738A1 |
| УСТРОЙСТВО для ТРАНСПОРТИРОВАНИЯ и ПЕРЕГРУЗКИ | 1972 |
|
SU357709A1 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| Грузоподъемник вилочного погрузчика | 1990 |
|
SU1730024A1 |
| ПОДЪЕМНАЯ УСТАНОВКА | 1993 |
|
RU2041337C1 |
г 5чJJ
Фиг 7
Б
J 2В
Фиг.2
Вид В
9
Л
/ 8
12
