выдвижения, состоящую из двух профилированных стоек с полками и опорными площадками 14 и 15 и с установленными в нижней части стоек роликами, и грузовую каретку 18 с верхней и нижней 32 парами роликов, установленную с возможностью вертикального перемещения на роликах по стойкам рамы 11. Рабочие поверхности передней внутренней 14 и задней внешней полок стоек внутренней подвижной рамы 11 и поверхности опорных площадок, находящихся в зонах сопряжения этих полок с боковой стенкой, расположены в соответственно параллельных плоскостях, а рабочая поверхность задней внутренней полки и поверхность опорной площадки, находящейся в зоне сопряжения пол кис боковой стенкой, расположены в плоскостях, составляющих угол 2-4° с указанными соответственно параллельными плоскостями, при этом оси верхних роликов каретки параллельны осям роликов неподвижной рамы, а проекции этих осей на горизонтальную плоскость составляют угол 2-4° с проекциями на нее осей нижних роликов каретки. Стойки неподвижной рамы имеют Е-образное сечение, образуемое передней, средней и задней полками и боковой стенкой с опорной площадкой в зоне сопряжения стенки со средней полкой на участке между передней и средней полками, а часть Е-образно- го сечения стойки на участке от средней до задней полки образует с участком стенки от передней до средней полки угол 160-170е. Предлагаемая конструкция позволяет повысить надежность элементов грузоподьем- ника, обеспечить удобство монтажа грузоподъемника, приблизить центр масс грузоподъемника к опорному контуру погрузчика и расширить сектор обзора для водителя погрузчика. 2 з.п, ф-лы, 4 ил.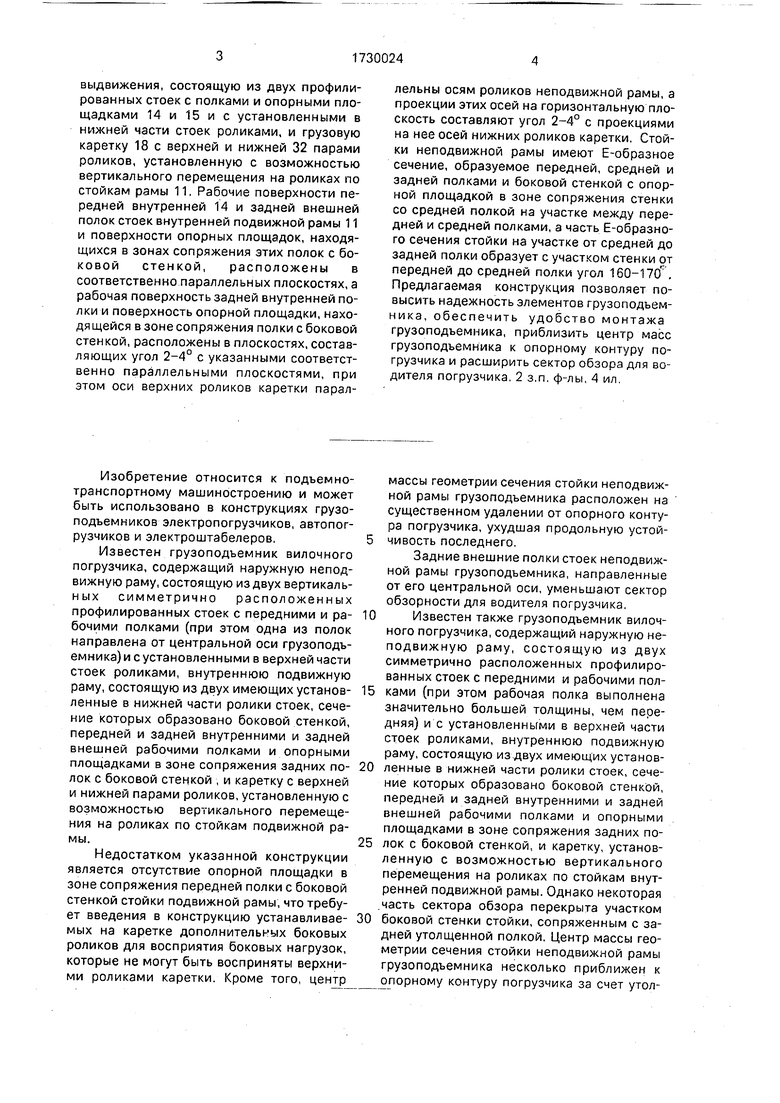

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| Грузоподъемник | 1991 |
|
SU1781165A1 |
| Грузоподъемник | 1990 |
|
SU1759790A1 |
| Грузоподъемник погрузчика | 1987 |
|
SU1384540A1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 1991 |
|
RU2048430C1 |
| Грузоподъмник погрузчика | 1973 |
|
SU540814A1 |
| Захват-кантователь к погрузчику | 1985 |
|
SU1278295A1 |
| Грузоподъемник погрузчика | 1977 |
|
SU658079A1 |
| Каток грузоподъемника погрузчика | 1979 |
|
SU844564A1 |
| Вилочный самоходный погрузчик | 1960 |
|
SU137821A1 |
Изобретение относится к подъемно- транспортному машиностроению и может быть использовано в конструкциях грузоподъемников электропогрузчиков, автопогрузчиков и электроштабелеров. Цель изобретения - улучшение эксплуатационных характеристик грузоподъемника и погрузчика в целом. Грузоподъемник вилочного погрузчика содержит наружную неподвижную раму 5, состоящую из двух вертикальных симметричных профилированных стоек с рабочими полками 7-9 и с установленными в верхней части стоек роликами, внутреннюю раму 11, установленную с возможностью телескопического
Изобретение относится к подъемно- транспортному машиностроению и может быть использовано в конструкциях грузоподъемников электропогрузчиков, автопогрузчиков и электроштабелеров.
Известен грузоподъемник вилочного погрузчика, содержащий наружную неподвижную раму, состоящую из двух вертикаль- ных симметрично расположенных профилированных стоек с передними и рабочими полками (при этом одна из полок направлена от центральной оси грузоподъемника) и с установленными в верхней части стоек роликами, внутреннюю подвижную раму, состоящую из двух имеющих установленные в нижней части ролики стоек, сечение которых образовано боковой стенкой, передней и задней внутренними и задней внешней рабочими полками и опорными площадками в зоне сопряжения задних полок с боковой стенкой , и каретку с верхней и нижней парами роликов, установленную с возможностью вертикального перемещения на роликах по стойкам подвижной рамы.
Недостатком указанной конструкции является отсутствие опорной площадки в зоне сопряжения передней полки с боковой стенкой стойки подвижной рамы, что требует введения в конструкцию устанавливаемых на каретке дополнительных боковых роликов для восприятия боковых нагрузок, которые не могут быть восприняты верхними роликами каретки. Кроме того, центр
массы геометрии сечения стойки неподвижной рамы грузоподъемника расположен на существенном удалении от опорного контура погрузчика, ухудшая продольную устойчивость последнего.
Задние внешние полки стоек неподвижной рамы грузоподъемника, направленные от его центральной оси, уменьшают сектор обзорности для водителя погрузчика.
Известен также грузоподъемник вилочного погрузчика, содержащий наружную неподвижную раму, состоящую из двух симметрично расположенных профилированных стоек с передними и рабочими полками (при этом рабочая полка выполнена значительно большей толщины, чем передняя) и с установленными в верхней части стоек роликами, внутреннюю подвижную раму, состоящую из,двух имеющих установленные в нижней части ролики стоек, сечение которых образовано боковой стенкой, передней и задней внутренними и задней внешней рабочими полками и опорными площадками в зоне сопряжения задних полок с боковой стенкой, и каретку, установленную с возможностью вертикального перемещения на роликах по стойкам внутренней подвижной рамы. Однако некоторая .часть сектора обзора перекрыта участком
боковой стенки стойки, сопряженным с задней утолщенной полкой. Центр массы геометрии сечения стойки неподвижной рамы грузоподъемника несколько приближен к опорному контуру погрузчика за счет утолщения задней рабочей полки и увеличения расстояния между передней и задней полками, что требует установки в нижней части стоек подвижной рамы роликов относительно большего диаметра, в результате умень; шается расстояние между осями опорных роликов, при крайнем верхнем положении каретки увеличивается нагрузка на полки и ролики. Кроме того, в грузоподъемнике (вследствие отсутствия опорной площадки в зоне сопряжения передней полки с боковой стенкой стойки подвижной рамы) также необходимо иметь на каретке дополнительные боковые ролики для восприятия боковых нагрузок.
Цель изобретения - улучшение эксплуатационных свойств путем упрощения конструкции, снижения веса, повышения продольной устойчивости и расширения сектора обзора.
Поставленная задача достигается тем, что в грузоподъемнике вилочного погрузчика, содержащем наружную неподвижную раму, состоящую из двух симметрично расположенных профилированных стоек с передними и рабочими полками и с установленными в верхней части стоек роликами, внутреннюю подвижную раму, состоящую из двух имеющих установленные в нижней части ролики стоек, сечение которых образовано по меньшей мере боковой стенкой, передней и задней внутренними и задней внешней полками, имеющими рабочие поверхности, и опорными площадками в зоне сопряжения задних полок с боковой стенкой, и каретку с верхней и нижней парами роликов, установленную с возможностью вертикального перемещения по стойкам подвижной рамы, в зоне сопряжения передней полки и боковой стенки стоек подвижной рамы также выполнена опорная площадка, причем рабочие поверхности передней внутренней и задней внешней полок стоек подвижной рамы и поверхности опорных площадок, находящихся в зонах сопряжения этих полок с боковой стенкой стоек, находятся в соответственно параллельных плоскостях, а рабочая поверхность задней внутренней полки стойки подвижной рамы и поверхность опорной площадки, находящейся в зоне сопряжения этой полки с боковой стенкой, находятся в плоскостях соответственно расположенных под углом 2-4° к указанным параллельным плоскостям, при этом оси верхних роликов каретки параллельны осям роликов неподвижной рамы грузоподъемника, проекции этих осей на горизонтальную плоскость составляют угол 2-4° с проекциями на эту же плоскость осей нижних роликов каретки. Стойки неподвижной рамы имеют Е-образное сечение, образованное передней, рабочей (средней) и задней полками и боковой стенкой с опорной площадкой в зоне сопряжения боковой стенки со средней полкой на участке между передней и средней полками, причем часть боковой стенки Е-образного сечения стойки неподвижной рамы на участке от средней до задней полки образует с
О участком стенки от передней до средней полки угол 160-170°.
Придание наклона в 2-4° осям нижних роликов каретки и соответственно рабочим поверхностям задних внутренних полок сто5 ек подвижной рамы и опорным площадкам, находящимся в зоне сопряжения этих полок с боковыми стенками стоек (т.е. именно тем поверхностям, с которыми должны взаимодействовать наклонные ролики), позволяет
0 выполнить опорные площадки так же, как и в зоне сопряжения боковых стенок с передними внутренними полками стоек подвижной рамы, так как без такого наклона нижние ролики каретки касались бы этих
5 площадок, взаимодействуя с которыми, верхние ролики каретки воспринимают боковые нагрузки, что позволяет исключить из конструкции дополнительные боковые ролики. Таким образом, упрощается конструк0 ция и уменьшается вес грузоподъемника.
Выполнение стоек неподвижной рамы грузоподъемника Е-образного профиля, в котором средняя полка является рабочей (взаимодействует с роликом подвижной ра5 мы) и в зоне своего сопряжения с боковой стенкой стойки на участке между передней и средней полками имеет опорную площадку, взаимодействующую также с роликом подвижной рамы, позволяет, не требуя уве0 личения диаметра ролика подвижной рамы, уменьшить расстояние между передней полкой профиля стойки неподвижной рамы и задней внешней полкой стойки подвижной рамы, в результате чего центр масс гру5 зоподъемника приближается к опорному контуру погрузчика, улучшая его продольную устойчивость. Кроме того, возможность выполнения роликов подвижной и неподвижной рамы меньшего диаметра, чем диа0 метр роликов каретки, уменьшает их массу и увеличивает расстояние между осями роликов подвижной рамы и осями роликов неподвижной рамы, что, снижая нагрузку на ролики и на полки стоек рам грузоподьем5 ника, позволяет выполнить полки меньшей толщины, за счет чего также уменьшается вес грузоподъемника.
Выполнение боковых стенок Е-образ- ных профилей стоек наружной неподвижной рамы грузоподъемника из двух
участков, образующих угол 160-170°, расширяет вправо и влево сектор обзора для водителя погрузчика, улучшая условия его работы.
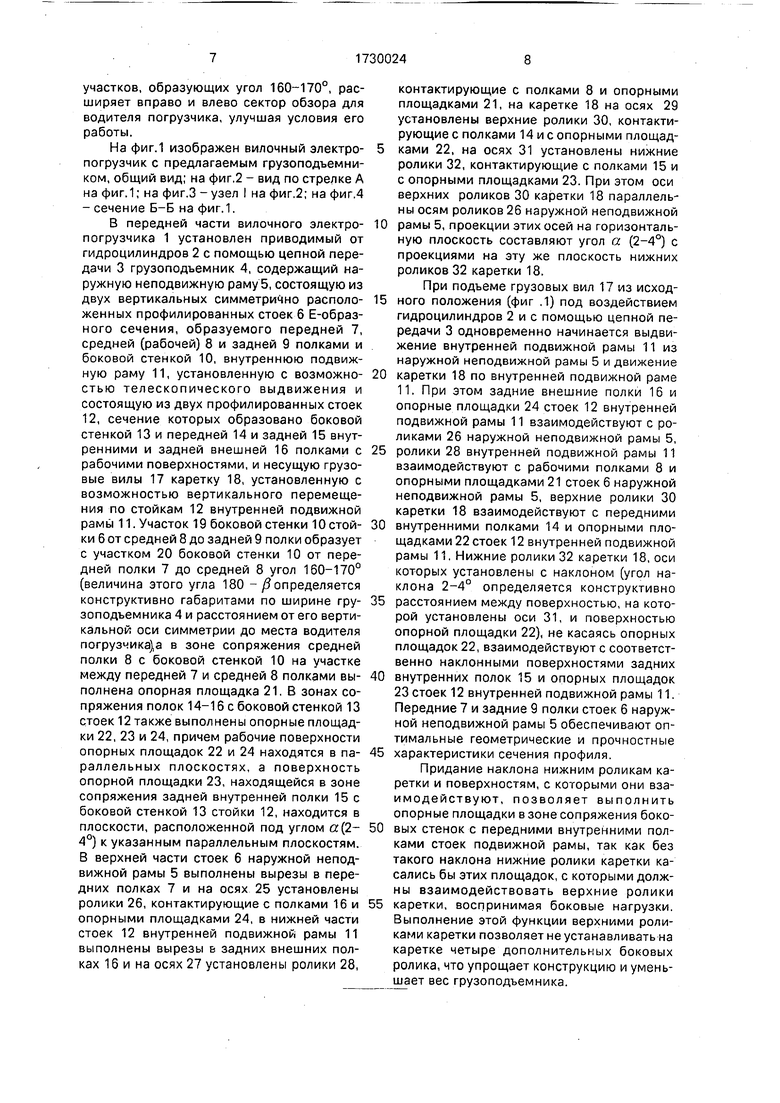
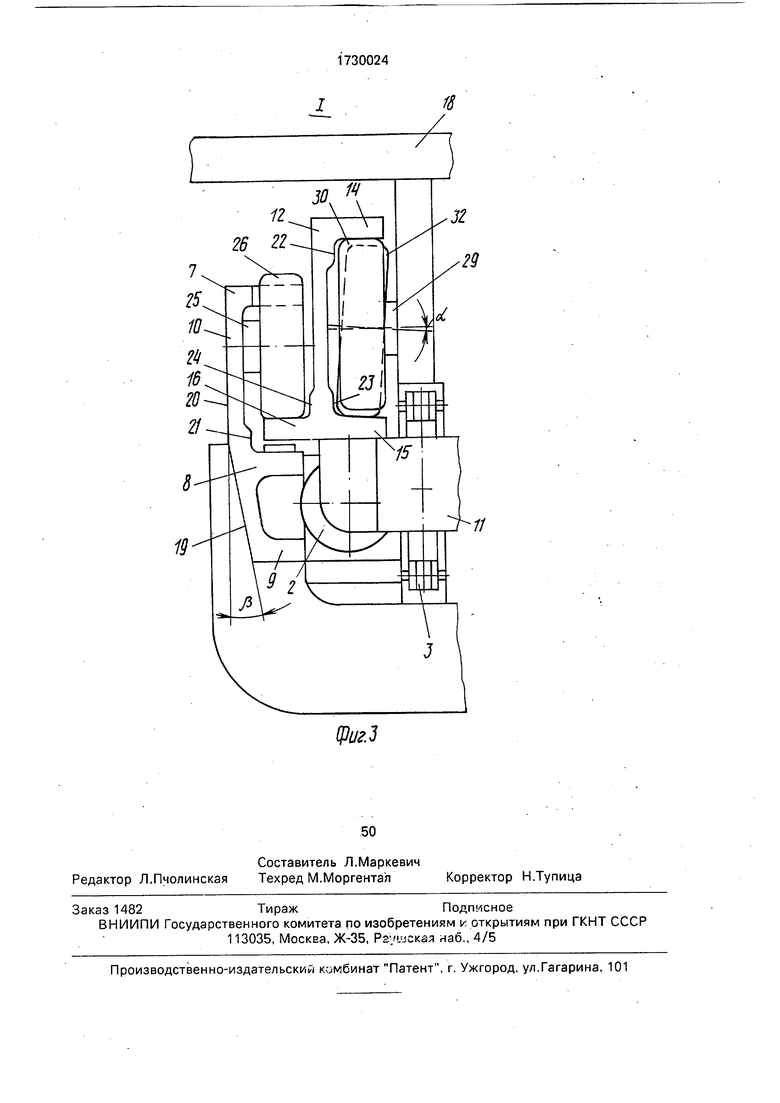
На фиг.1 изображен вилочный электропогрузчик с предлагаемым грузоподъемником, общий вид; на фиг.2 - вид по стрелке А на фиг.1; на фиг.З - узел I на фиг.2; на фиг.4 - сечение Б-Б на фиг.1.
В передней части вилочного электропогрузчика 1 установлен приводимый от гидроцилиндров 2 с помощью цепной передачи 3 грузоподъемник 4, содержащий наружную неподвижную раму 5, состоящую из двух вертикальных симметрично расположенных профилированных стоек 6 Е-образ- ного сечения, образуемого передней 7, средней (рабочей) 8 и задней 9 полками и боковой стенкой 10, внутреннюю подвижную раму 11, установленную с возможностью телескопического выдвижения и состоящую из двух профилированных стоек 12, сечение которых образовано боковой стенкой 13 и передней 14 и задней 15 внутренними и задней внешней 16 полками с рабочими поверхностями, и несущую грузовые вилы 17 каретку 18, установленную с возможностью вертикального перемещения по стойкам 12 внутренней подвижной рамы 11. Участок 19 боковой стенки 10 стойки 6 от средней 8 до задней 9 полки образует с участком 20 боковой стенки 10 от передней полки 7 до средней 8 угол 160-170° (величина этого угла 180 -/ определяется конструктивно габаритами по ширине грузоподъемника 4 и расстоянием от его вертикальной оси симметрии до места водителя погрузчика),а в зоне сопряжения средней полки 8 с боковой стенкой 10 на участке между передней 7 и средней 8 полками выполнена опорная площадка 21. В зонах сопряжения полок 14-16 с боковой стенкой 13 стоек 12 также выполнены опорные площадки 22, 23 и 24, причем рабочие поверхности опорных площадок 22 и 24 находятся в параллельных плоскостях, а поверхность опорной площадки 23, находящейся в зоне сопряжения задней внутренней полки 15 с боковой стенкой 13 стойки 12, находится в плоскости, расположенной под углом а(2- 4°) к указанным параллельным плоскостям. В верхней части стоек 6 наружной неподвижной рамы 5 выполнены вырезы в передних полках 7 и на осях 25 установлены ролики 26, контактирующие с полками 16 и опорными площадками 24, в нижней части стоек 12 внутренней подвижной рамы 11 выполнены вырезы в задних внешних полках 16 и на осях 27 установлены ролики 28,
контактирующие с полками 8 и опорными площадками 21, на каретке 18 на осях 29 установлены верхние ролики 30, контактирующие с полками 14 и с опорными площадками 22, на осях 31 установлены нижние ролики 32, контактирующие с полками 15 и с опорными площадками 23. При этом оси верхних роликов 30 каретки 18 параллельны осям роликов 26 наружной неподвижной
0 рамы 5, проекции этих осей на горизонтальную плоскость составляют угол а (2-4°) с проекциями на эту же плоскость нижних роликов 32 каретки 18.
При подъеме грузовых вил 17 из исход5 ного положения (фиг .1) под воздействием гидроцилиндров 2 и с помощью цепной передачи 3 одновременно начинается выдвижение внутренней подвижной рамы 11 из наружной неподвижной рамы 5 и движение
0 каретки 18 по внутренней подвижной раме 11. При этом задние внешние полки 16 и опорные площадки 24 стоек 12 внутренней подвижной рамы 11 взаимодействуют с роликами 26 наружной неподвижной рамы 5,
5 ролики 28 внутренней подвижной рамы 11 взаимодействуют с рабочими полками 8 и опорными площадками 21 стоек 6 наружной неподвижной рамы 5, верхние ролики 30 каретки 18 взаимодействуют с передними
0 внутренними полками 14 и опорными площадками 22 стоек 12 внутренней подвижной рамы 11, Нижние ролики 32 каретки 18, оси которых установлены с наклоном (угол наклона 2-4° определяется конструктивно
5 расстоянием между поверхностью, на которой установлены оси 31, и поверхностью опорной площадки 22), не касаясь опорных площадок 22, взаимодействуют с соответственно наклонными поверхностями задних
0 внутренних полок 15 и опорных площадок 23 стоек 12 внутренней подвижной рамы 11. Передние 7 и задние 9 полки стоек 6 наружной неподвижной рамы 5 обеспечивают оптимальные геометрические и прочностные
5 характеристики сечения профиля.
Придание наклона нижним роликам каретки и поверхностям, с которыми они взаимодействуют, позволяет выполнить опорные площадки в зоне сопряжения боко0 вых стенок с передними внутренними полками стоек подвижной рамы, так как без такого наклона нижние ролики каретки касались бы этих площадок, с которыми должны взаимодействовать верхние ролики
5 каретки, воспринимая боковые нагрузки. Выполнение этой функции верхними роликами каретки позволяет не устанавливать на каретке четыре дополнительных боковых ролика, что упрощает конструкцию и уменьшает вес грузоподъемника.
Е-образный профиль стоек неподвижной рамы грузоподъемника позволяет уменьшить по сравнению с заменяемым объектом диаметр роликов подвижной рамы на 30 мм и приблизить на 15 мм к опорному контуру погрузчика центр масс грузоподъемника.
Благодаря возможности выполнения роликов подвижной и неподвижной рамы меньшего диаметра, чем диаметр роликов каретки, увеличивается расстояние между осями роликов подвижной рамы и осями роликов неподвижной рамы, что, снижая нагрузку на ролики и на полки стоек рам грузоподъемника, позволяет уменьшить толщину полок.
Выполнение боковых стенок стоек неподвижной рамы из двух участков, составляющих тупой угол, позволяет расширить сектор обзора для водителя погрузчика на 1,5° вправо и на 1,5° влево.
Формула изобретения
20 Ю Ф№.2
| Патент США № 4614253, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
