1
Изобретение относится к общему машиностроению, а именно к способам уравновешивания роторов.
Известен способ уравновешивания роторов, заключаюшийся в том, что иа балансировочном станке определяют величину и угловую координату неуравновешенности ротора как жесткого тела и устанавливают на ротор балансируюш,ие грузы.
Однако известным способом трудно получить высокое качество уравновешенности роторов, работаюш,их на скорости, при которой проявляется их гибкость.
По предлагаемому способу по найденным значениям величины и угловой коор.дипаты неуравновешенности одним из известных способов определяют величины и направления смеш,ения главной центральной оси инерции ротора по отношению к оси вращения в плоскостях центров масс отдельных участков ротора и устанавливают в этих плоскостях балаисирующне грузы, компенсирующие эти смещения.
Это повышает качество уравновешенности роторов, работающих «а скорости, при которой проявляется их гибкость.
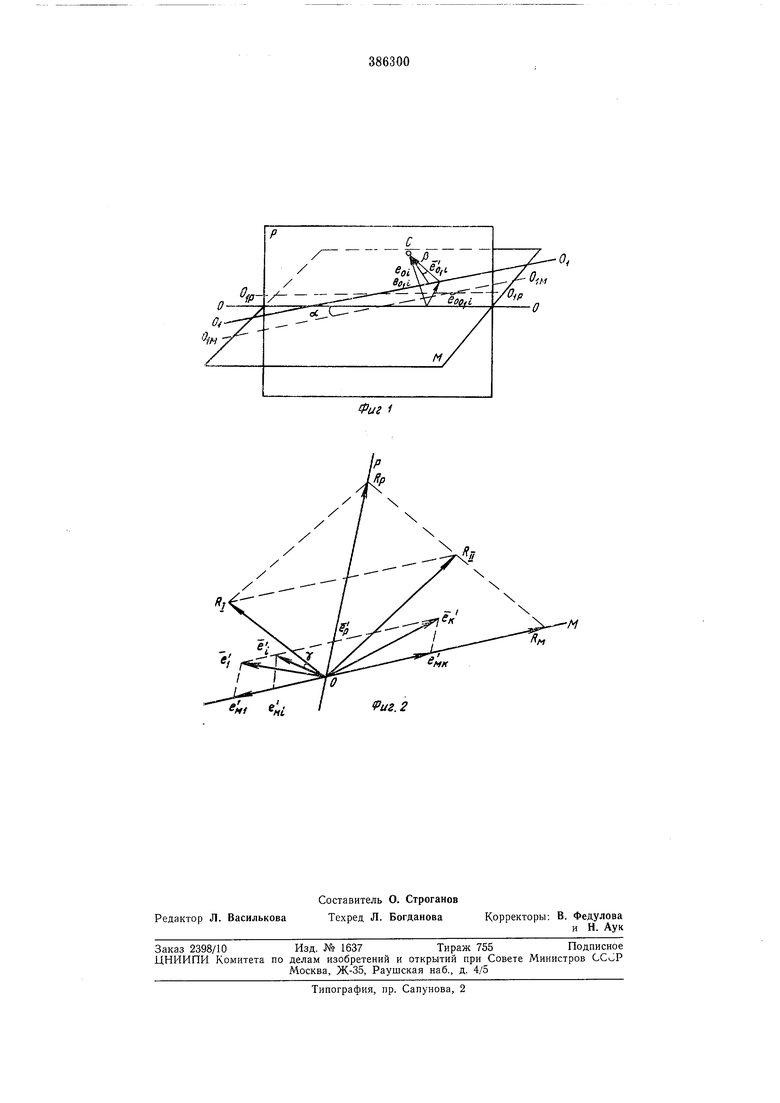
На фиг. 1 изображена схема взаимного положения оси Вращения и главной центральной оси инерции ротора, где
Р - плоскость главного вектора; М - плоскость главного момента; О-О - ось вращения; - главная центральная ось инерции
ротора;
OIP-OIP и OIM-OIM -проекции 0|-О на плоскости Р и М; а угол между О-О и - OIM , вог - смещение центра t-той массы ротора от оси вращения;
sOii -смещение центра t-той массы ротора
от главной центральной оси инерции ротора;
eoOii -расстояние между осями О-О и
GI-Oi в плоскости, проходящей через центр
i-и массы перпендикулярно оси 0-0;
eoj - смещение центра t-той массы ротора от главной центральной оси инерции при совпадении ее с осью вращения; с - центр t-той массы poTOipa; Р - угол междуео,ги eo,iНа фиг. 2 изображена векторная диаграмма, поясняющая предлагаемый способ, где RI и RU - векторы уравновешивающих сил в плоскостях приведения I и II;
РнМ - координатные оси, являющиеся следами плоскостей Р и М на плоскость, перпендикулярную оси вращения;
el ... ek смещения центров масс ротора от нейтрального полол ения: 3 BMI и ер - проекции векторов ei -ь вц на координатные оси. Теоретическая основа предлагаемого способа вытекает из анализа уравнений уравновешенного ротора.5 Яо. + ., (1) MOI + MI+MU O, где Sj°ob - сум.мы центрооежных сил и их моментов отн осительн о центра массы ротора; Ri, Rii и MI, Mil - уравновешивающие силы в плоскостях приведения I и II и -их моменты15 относительно центра массы ротора. Достаточно просто доказывается, что Р - ЕР SP 01- 00,1-г Oii, () jyj f j MQ ;, где Po,t я MO,I -центробежная сила, вызванная смещением центра i-й массы от оси О)-Oi и момент ее относительно центра маесы ротора; PoOii И М00,1 - Центробежная сила, вызванная смещением оси Oi-Oi от оси О - О и момент относительно центра массы ротора. Действительно, из фиг. 1 видно, чтоJQ ёог ёоо,1 + 7о,1, (3) Так как а для реальных роторов не превыщает нескольких минут и , то можно считать: eo,i - o,i . Поскольку ,35 то учитывая (3) можно получить ,i-}+ Poii , как известно Ро,1 0, MO,I O, (4) Расположение эксцентриситетов масс ротора около оси является нейтральным. С учето.м (4) и (2) зависимость (1) цринимает вид SPoo. + 1 + и О,45 I,MOO,, (5) т. е. неуравновещенность ротора .как твердого тел|а возникла в результате смещения оси -„ , ,,л,,« л г. О-о от оси GI-Oi. Следовательно, уравно- вещивать нужно в плоскости каждого диска центробежные силы, вызванные именно этим смещением Такое рещение позволяет сохранить оптимальную (нейтральную) систему внутренних сил и моментов на роторе. Одно -из возможных графо-аналитических рещений зависимости (5) заключается в следующем. Главный вектор Р и главный момент М цен-gQ тробежньгх сил, действующих на ротор представлены как: Р spoQ z - (1 -f- i), М Моо,1 -(Л11 + Ми}-65 4 Если плоскость приведения I на расстоянии Ь, а плоскость приведения II на расстоянии а от центра масс ротора, то - i -b ij--Ru-a .b + Rna)a( Строят координатную систему с осями Р и М (фиг. 2), принимая за положительное направление вектора Rp Ri Rn и RM Ru--Ri . Эти оси являются следами плоскостей главного вектора и главного момента на .плоскости, проведенной через центр масс ротора перпендикулярно оси вращения. Точка О - след вращения. Определяют в данной координатной системе положение главной центральной оси инерции ротора. Проекции еоо,/ на оси Р и М обозначаются какёр ёмг. В плоскости Р О, (6) поскольку оси OIP-Oip и Oj-Oj параллель.ны. Согласно теореме о сложении параллельных сил ( - т ё,ш (7) где гпс - масса ротора, ее - смещение ее центра относительно оси вращения. После подставки (7) в (6): я„ я - ,„ of в плоскости М (фиг. 1) величина Вмг находится из уравнения моментов Е/п ё i MI i и геометрической зависимости ё // tg а, Где /г -расстояние от центра массы ротора до е 00,1, тогда 7 С9 ЛИ9V -, l2V / о / ч Зависимости (8) и (9) позволяют найти eoo,i , - положение главной центральной оси инерДии ротора относительно оси вращения, Принимая j Р Р MI MI строят необходимые для уравновещивания векторы: ei.e Практическую реализацию предлагаемого способа осуществляют в следующей последо:5ательности:1.Находят для ротора уравновешивающие массы mi и тц в плоскостях приведения I и II известным путем. 2.Строят векторную диаграмму из RI , Кц : /TZji r,j, Rp Ri , ,I А., , где /-I и Гц - радиусы постановки mi и ти. 3.Подсчитывают величины RP - R,,-a-li ер -, е где OTC - масса ротора, 1 и 4 - расстояния от центра масс первого и последнего дисков до центра масс ротора. 4. Откладывают на векторной диаграмме в определенном масштабе: ер - по направлению Rp. fVi - по направлению проекции fi на ось М, емп - по направлению проекции Rn на ось М и строят: ei ,., е -g +е 5. Концы векторов ej и ek соединяют прямой и делят на k частей, пропорционально расстояниям между центрами масс дисков ротора. Соединив отрезки прямой с началом 5 10 .. 20 25 30 35 координат, получают все искомые К векторов. 6. Подсчитывают уравновешивающие массы niyi (i, 2, ... k) для установки балансирующих грузов: myt где Гуг - радиус установки балансирующих грузов. 7. Устанавливают балансирующие грузы с массой niyi на ротор. Место установки определяют по угЛу ( (ег, RI) или у(ег, RII) на векторной диаграмме. Предмет изобретения Способ уравновешивания роторов, заключающийся в том, что на балансировочном станке определяют величину и угловую координату неуравновешенности ротора как жесткого тела и устанавливают на ротор балансирующие грузы, отличающийся тем, что, с целью повышения качества уравновешенности роторов, работающих на скорости, при которой проявляется их гибкость, по найденным значениям величины и угловой координаты неуравновешенности одним из известных способов определяют величины и направления смещения главной центральной оси инерции ротора по отношению к оси вращения в плоскостях центров масс отдельных участков ротора и устанавливают в этих плоскостях балансирующие грузы, компенсирующие эти смещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Стиральная машина | 1989 |
|
SU1678934A2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СПОСОБ УРАВНОВЕШИВАНИЯ ЖЕСТКИХ РОТОРОВ С МОМЕНТНО-НЕУРАВНОВЕШЕННЫМИ ФУНКЦИОНАЛЬНЫМИ ЭЛЕМЕНТАМИ | 2001 |
|
RU2183824C1 |
| Способ автоматической балансировки центрифуги | 1984 |
|
SU1650256A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| ГРАВИТАЦИОННЫЙ ДВИЖИТЕЛЬ САВЕЛЬКАЕВА | 1993 |
|
RU2056524C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2005 |
|
RU2296309C1 |
| Стенд для испытания колес и осей колесных пар на сопротивление усталости и способ проведения испытаний | 2017 |
|
RU2651629C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
f Mi
м
Риг.2
