1
Изобретение может быть использовано при rasOiBoft резке листового металла.
Известны устройства для кислородо-ацетиленовой резки, содержащие механизированный стол-рольганг с рабочей тележкой, приспособлением для предотвращения образования грата и резак; фотокопировальную головку, систему управления перемещением резака и приспособления для предотвращения образования грата с помощью сельсинов.
Цель изобретения - повысить надежность устройства в эксплуатации.
Это достигается тем, что резак и устройство для предотвращения образования грата жестко связаны между собой и закреплены на траверее, предусмотренной на рабочей тележке и несущей фотокопировальную головку.
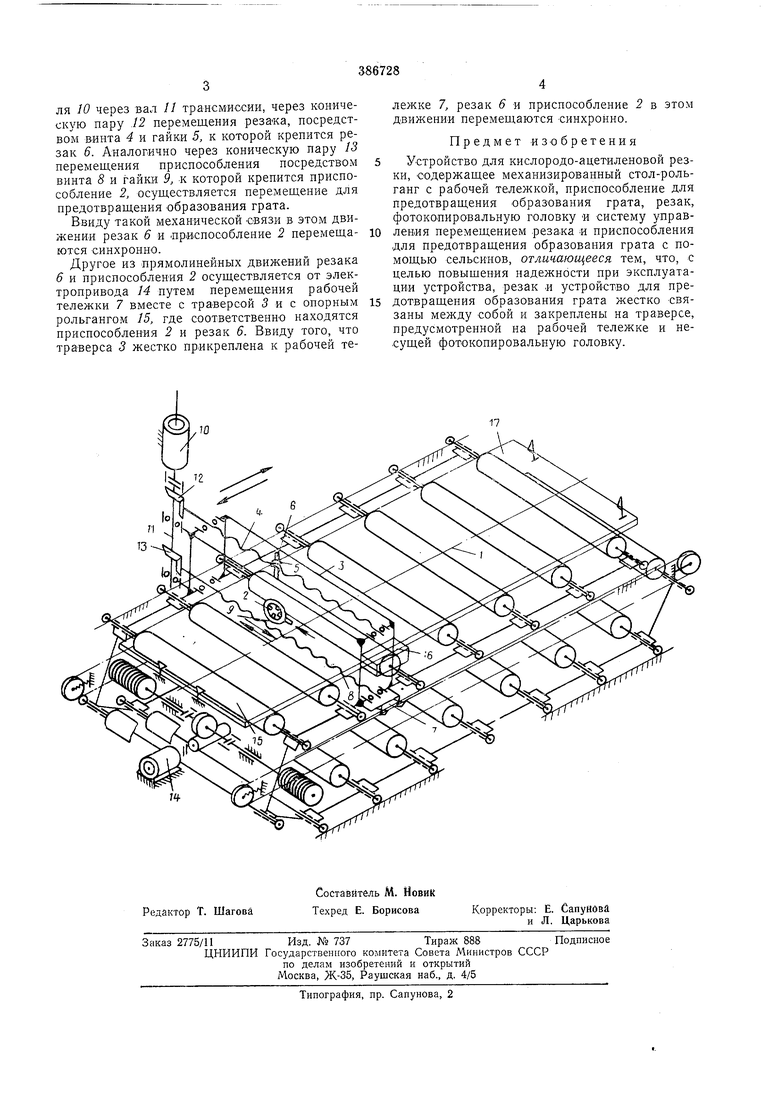
На чертеже изображен предполагаемый газорезательный автомат.
Он содержит механизированный стол-рольГанг У с приспособлением 2 для предотвращения образования грата, траверсу 3, снабженную винтом 4, по которому перемещается гайка 5.
К гайке 5 прикреплен резак 6, перемещающийся возвратно-поступательно по траверсе 3. Траверса 3 жестко закреплена к рабочей тележке 7 стола-рольганга /. В рабочей тележке 7 установлен винт 5 с гайкой 9. На гайке 9 закреплено приспособление 2, перемещающе2
еся возвратно-поступательно с помощью винта 8.
Электродвигатель 10 механизма перемещения резака 6 и приспособления 2 связан с трансмиссионным валом // и при помощи конической пары 12 - с механизмом перемещения резака 6. Посредством конической пары 13 электродвигатель 10 связан с механизмом перемещения приспособления 2. Электропривод 14 перемещения рабочей тележки 7 связан с опорным рольгангом /5 и с фотоэлектронной головкой 16.
Описанный агрегат работает следующим образом. Металлический лист 17 для порезки поступает на опорный рольганг 15 механизированного стола-рольганга /. В фотоэлектронную головку 16 закладывают фотокопир.
Подают сжатый воздух к приспособлению 2, зажигают резак 6 и производят порезку листа согласно фотокопира. При резке листа резак 6 и приспособление 2, жестко связанные между собой с помощью траверсы 3 и общего трансмиссионного вала //, выполняют синхронно сложное движение по сигналу-команде с фотоэлектронной головки 16.
Сложное движение резака 6 и приспособления 2 слагается из двух прямолинейных движений, т. е. сигнал-команда поступает на два электропривода. Одно из прямолинейных движений осуществляется от электродвигаТе
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗИРОВАННЫЙ СТОЛ-РОЛЬГАНГ | 1973 |
|
SU385704A1 |
| Поточная линия для сборки и сварки блоков цилиндров дизельных двигателей | 1978 |
|
SU753573A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ И ФИКСИРОВАНИЯ ЗАГОТОВОК | 1995 |
|
RU2080229C1 |
| Фотокопировальное устройство машин для термической резки | 1976 |
|
SU732097A1 |
| МЕХАНИЗИРОВАННЫЙ СТОЛ | 1967 |
|
SU196535A1 |
| Машина для термической резкилиСТОВ | 1979 |
|
SU795790A1 |
| АВТОМАТИЧЕСКАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ ФОРМОВАНИЯ И ВУЛКАНИЗАЦИЯ ПОКРЫШЕК | 1969 |
|
SU243817A1 |
| Технологическая линия | 1969 |
|
SU327736A1 |
| ФОРМОВОЧНАЯ МАШИНА | 1972 |
|
SU350569A1 |
| Способ линейной газовой резки | 1979 |
|
SU833387A1 |
