Различные системы микроманипуляторов с винтовым замедлением движений имеют тот большой недостаток, что микродвижениями в каждом из трех измерений управляет изолированная система винтов. Нижеописываемое приспособление имеет назначение сконцентрировать три системы управления в одну. Так как это приспособление может быть приключено к любому винтовому микроманипулятору, то изготовление его даст возможность использовать многочисленные микроманипуляторы Петерфи, имеющиеся в научных лабораториях и мало используемые до сих пор вследствие трудности приобретения навыка работы с ними.
На чертеже фиг. 1 представляет собой схематический вид приспособления. В центре находится шар 29 из плотной резины, покояшийся на шариковых подшипниках, сидяш1их в специальных гнездах, сделанных на внутренней поверхности обоймы 31 с шариками 30. Шарик может свободно вращаться в любом направлении. В том месте, где вертикальная ось шара мысленно выходит на поверхность в верхней его части, к нему прикасается металлическая шайба 32, имеющая на своем ободке ряд острых шипиков. Шайба 32 насажена на полую ось, продолжение которой 33 заканчивается большой головней 34.
Полая ось сидит в гнездах П-образной державки 35. Эта державка прикреплена при помощи винта 36 к колпачку 37. Колпачок вместе с державкой и шайбой 32 может быть повернут при помощи головки 34 вокруг вертикальной оси. потому что колпачок 37 вставлен в гнездо в обойме 31 так, что может свободно вращаться. На фиг. 2 чертежа показан внешний вид приспособления; стрелки указывают возможные направления вращения колпачка. Винт 36 (фиг. 1), помимо несения функции скрепления державки с колпачком, служит также для регулирования степени нажатия шайбы 32 на шар 29. Это нажатке должно быть таково, чтобы при вращении шайбы 32 за головку 34 шар 29 легко вращался, зацепляемый шипиками на ободке шайбы 32. Помимо металлической шайбы 32 к шару в его экваториальной части прижимаются также резиновые шайбы 38 и 39, оси которых взаимно перпендикулярны друг к другу. На фиг. 1 шайба 5Р для наглядности представлена находящейся несколько выше своего нормального положения. Обойма 5/ огибает в местах-/( и 41 шайбы 38 VI 39 выпускает наружу их оси 42 и 43. Внутри полой оси 33 продета ось 44 с головкой 45, помощью которой эта ось может вращаться независимо от полой оси 33. На фиг. 2 видно, как оси 42, 43 и 44
сочленяются с винтами 8, 9 и 22 при помощи гибких валов. На чертеже сочленения с гибкими валами показаны лишь схематично; фактически сочленение должно осуществляться так, чтобы наружная оболочка гибкого вала была неподвижно соединена с обоймой 57, и телько вращающаяся сердцевина гибкого вала соединялась с осями 42, 43 и - и с винтами 8, 9, 22. Шайбы 32, 38 и 39 могут быть сделаны металлическими с накаткой в зависимости от того, что окажется практически более удобным.
Во время работы рука экспериментатора держит головку 34 и придает ей вращательное движение в том и в другом направлени. От этого шайба 32 вращает шар 29, а последний, в свою очередь, вращает резиновую шайбу 38 или шайбу 39, в зависимости от того, вокруг какой из осей вращается ufap. При этом из описания ясно, что все оси лежат в горизонтальной плоскости и проходят через экваториальные точки шара. Ось вращения шара всегда параллельна оси 33. При изменении направления оси 33 в пределах, указанных стрелками на фиг. 2, меняется ось вращения шара 29. Если ось 33 в данный момент установлена параллельно оси 43 и перпендикулярно к оси 42, то при вращении головки 34 вращается ось 43, но не вращается ось 42. Если, наоборот, ось 33 установлена параллельно оси 42 и перпендикулярно к оси 43, то, вращая головку 34, вращают ось 42 и не вращают ось 43. Если, наконец, ось 33 занимает какое-либо среднее из вышеуказанных положений, то вращаются оси и 2 и 43, но медленнее, чем самая ось 33. Скорости вращения осей 42, 43 находятся в следующем взаимоотношении: при повороте оси 33 по направлению стрелок на фиг. 2, чем больше ось 33 отходит от состояния параллельности с осью 43 и приближается к состоянию перпендикулярности с той же осью 43, тем больше скорость вращения оси 43 убывает, а оси 42, напротив, увеличивается.
Во время работы экспериментатор вращает головку 34, которая приводит в микроскопически-медленное движение микроиглу микроманипулятора. При этом, изменяя направление оси 33, можно в соответствующую сторону изменять и направление движения микроинструмента. Вращением головки 45, находящейся на .той же головке 34, придают микроигле движение вверх и вниз.
Гибкие валы могут быть присоединены не только к тонким винтам, но также и к грубым винтам микроманипулятора, создавая таким образом возможность работы под лупой или при слабом увеличении микроскопа.
Предмет изобретения.
1.Приспособление для управления движением микроинструмента микроманипулятора, отличающееся применением шара 29 из упругого материала, помещенного на шариках 30 в шаровую обойму 5/ и приводимого во вращение при помощи шайбы 32, надетой на полую ось 33 гибкой передачи к управляющему подъемом микроинструмента винту 22.
2.В приспособлении по п. 1 применение шайб 38 и 39, которые прикасаются к шару 29 и оси которых соединены с гибкими валами винтов 8 и 9, управляющих перемещением стойки микроманипулятора в горизонтальных направлениях.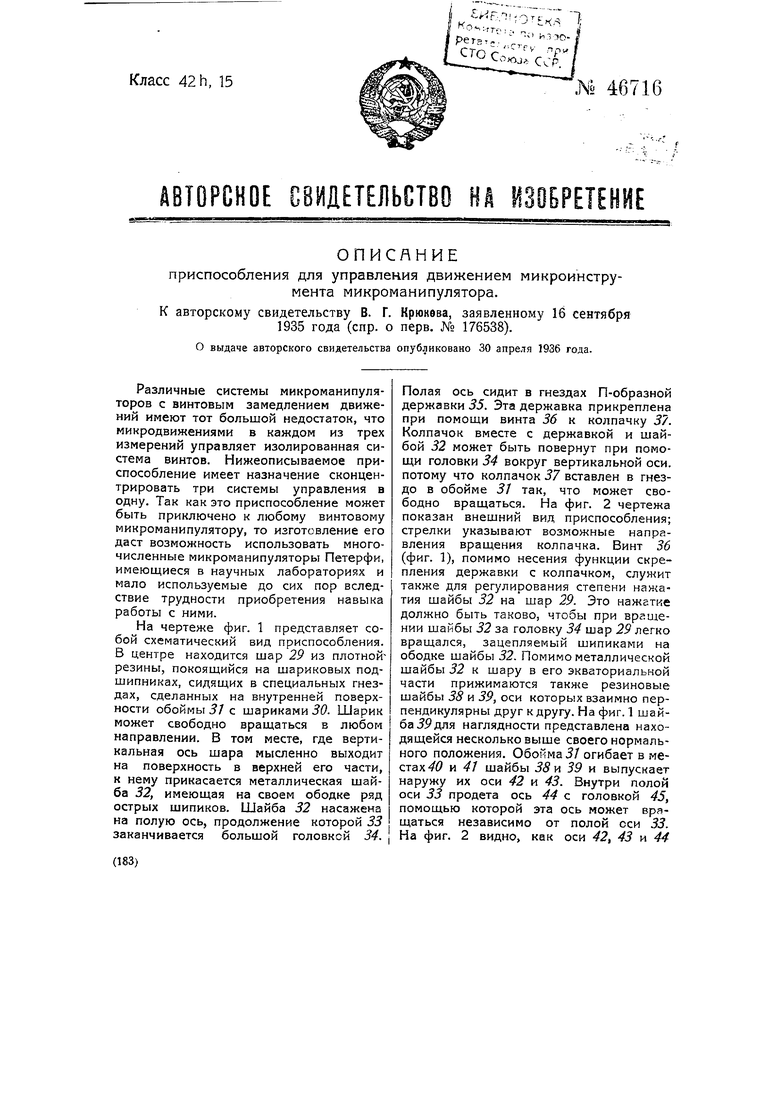
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1934 |
|
SU41217A1 |
| Механизм для управления движениями винтов микроманипулятора | 1947 |
|
SU75073A1 |
| Микроманипулятор | 1935 |
|
SU46715A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38799A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38800A1 |
| Микроманипулятор для микрохирургии | 1984 |
|
SU1238016A1 |
| Способ заточки стеклянных микропипеток и устройство для его осуществления | 1985 |
|
SU1315248A1 |
| Микроманипулятор | 1984 |
|
SU1766647A1 |
| Устройство для изготовления стеклянных микроинструментов | 1983 |
|
SU1183469A1 |
| Микроманипулятор | 1947 |
|
SU146954A1 |