Изобретение относится к устройствам для передачи давления на рабочий орган, например, при торможении, штамповке, печатании, и имеет целью управление рабочим органом при помощи силы, действующей на него через диференциальную передачу, точка опоры которой перемещается под действием той же силы при помощи дополнительной передачи. Последняя может быть осуществлена не в самотормозящейся форме, и тогда применяются самотормозящиеся стопорные приспособления или катаракт. В качестве дополнительной передачи могут быть применены также гидравлическая передача или коническая зубчатка, сцепляющаяся с зубчатым сектором, а для прекращения их работы служат различные выключающие органы. С целью поглощения живой силы движущихся масс при остановке опорной точки диференциальной передачи могут служить различные затормаживающие приспособления.
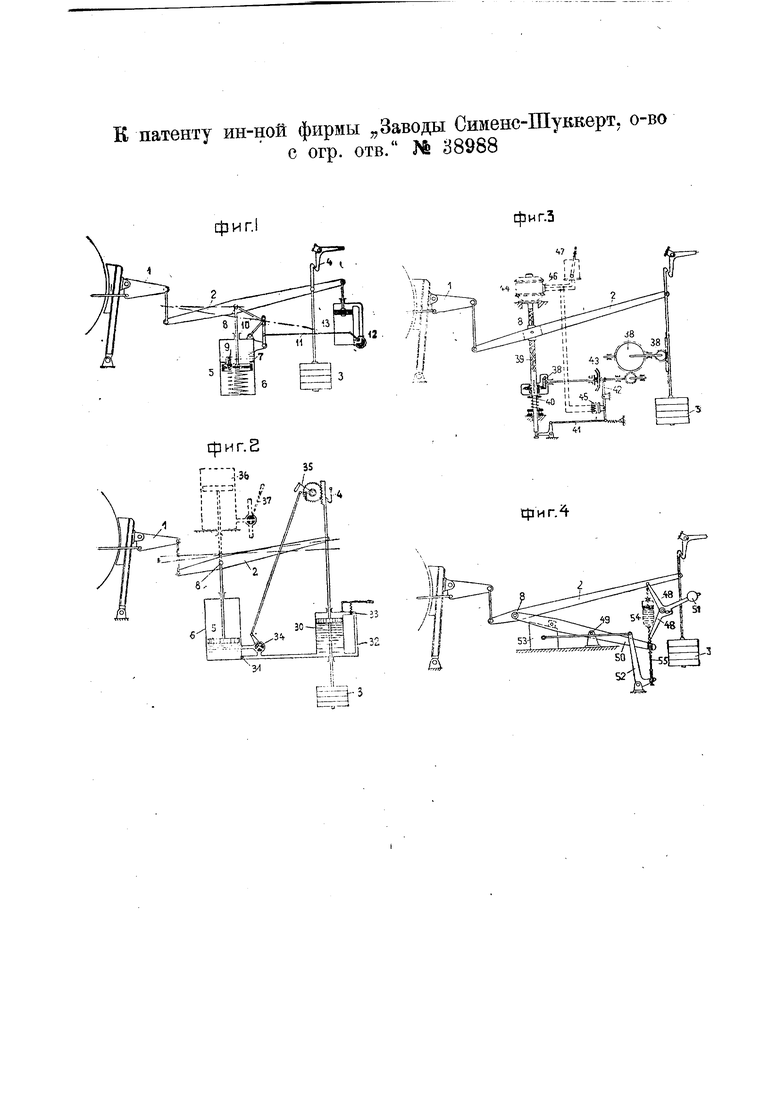
На схематическом чертеже фиг. 1-6 представляют различные формы выполнения предлагаемого устройства для передачи давления на рабочий орган. Главный тормозный рычаг / (фиг. 1)
(417)
какой-либо движущейся мащины приводится в действие рычагом 2 при помощн груза 3 через систему тяг, в случае расцепления удерживающего приспособления 4. С рычагом 2 связан порщень 5,. который прижимается действием пружины 6 к упорам 7 на стенках цилиндра.. При опускании груза 3 рУчаг 2 поворачивается около опорной точки 8 до тех пор, пока не прижмутся тормозные колодки. Пружина натянута настолько сильно, что выдерживает без сжатия усилие реакции в точке 8, возникающее при преодолении мертвого хода. Только после того, как тормозные колодки прищли в соприкосновение, происходит сжатие пружины 6 и опускание порщня. Давление, действующее на тормозные колодки, таким образом определяется силой сопротивления, которую оказывает порщень, а вместе с тем и опорная точка 8, движению вниз. Таким образом, здесь в противоположность обычным конструкциям выключаются действия массы груза. Подбором силы сопротивления, действующей на точку 8, таким образом возможно определить и регулировать тормозное усилие и его нарастание.
Живая сила падающего груза 3 пере,дается пружине б. Если цилиндр наполнить жидкостью и устроить на поршне пружинный клапан Я то поршень может служить жидкостным тормозом и будет поглощать часть кинетической энергии. Усиливающееся сопротивление работе порщня соответственно повышает силу нажатия тормоза. При движении опорной точки 8 могут быть включены регулирующие приспособления, чтобы усилить или регулировать оттормаживание движущихся масс, или же воспринять часть действующей силы, или привести в действие силу противоположную, например, при помощи включения мотора или тормозного цилиндра. В примере выполнения по фиг. 1 для этой цели к цилиндру поршня 5 шарнирно прикреплен коленчатый рычаг /О, который при помощи тяг // поворачивает клапан 72 жидкостного тормоза 75, соединенного в точке М с рычагом 2. Если точка 8 сдвигается вниз, то клапан 72 может все более и более закрываться, так что усиливается пружинящее дей-ствие цилиндра 75 до тех пор, пока при закрытии клапана, соответствующем смещению точки 8 вниз на определенную величину, груз 3 не может более опуститься, и дальнейшее нарастание -силы нажатия колодок не может иметь места.
Чтобы осуществить быстрое перемещение тормозного приспособления при ;замыкании и Освобождении, перемещение от первой силы переносится в точку приложения второй силы при помощи .дополнительной передачи так, что перемещения в точке нажатия складываются, И таким образом достигается быстрое перемещение без применения вспомогательных сил. Примером может служить устройство по фиг. 2, где в качестве .дополнительной передачи применена гидравлическая передача 30.
В устройстве по фиг. 2 падающий груз 3 двигает поршень в неподвижном цилиндре гидравлической передачи 30, соединенной напорной трубой с цилиндром 6, поршень 5 которого служит источником второй силы. При расцеплении падающего груза напорная жидкость из -гидравлической передачи 30 входит под (ПОршень 5, так что опорная точка 8
рычага 2 подымается, и происходит быстрое нажатие тормозных колодок.
Скорость подъема точки тем больше, чем больше отношение размеров поршня, движущегося под действием падающего груза, к размерам поршня 5. Давление, под KOTOpbiM прижимается приспособление для нажатия, в первый момент определяется соотношением площадей обоих поршней. Вследствие действия масс рычаг2 начинает пружинить. Точка 8 сначала приподнимается, затем опускается. При опускании произойдет возвратное движение жидкости, и обратный клапан 57 за, кроется, так что опускание точки 8 прекратится. Далее тормоз подтормаживается действием падающего груза 3, так как вследствие неплотностей в поршне цилиндра гидравлической передачи56он может еще более опуститься. Опускание это осуществляется также при помощи обходной трубки 52, которая запирается пружинным клапаном 55, служащим как для смягчения работы передачи, так и для ее прекращения. Установкой пружины этого клапана можно регулировать давление и этим определить силу нажатия тормоза. При обратном ходе во время оттормаживания, благодаря подъему груза, следует разомкнуть механизм, запирающий поршень 5. Это происходит при помощи клапана (крана) 34, который, открывает трубку, обходящую обратный клапан 57. Клапан 34 может быть приведен в действие, например, при помощи тяги и скользящей муфты при обратном движении подъемного приспособления 55. По другой конструкции, однако, он может быть открыт уже тогда, когда при обратном подъеме падающий груз 5 достиг определенной точки. Устройства обходного клапана можно совсем избежать, если устроить обратный клапан 57 таким образом, чтобы он открывался, когда давление жидкости над порщнем 5 достигнет определенной величины. В описываемом случае падение груза 5 совершается свободно до тех пор, пока поршень 5 движется вверх, и когда это движение прекращается, то цилиндр гидравлической передачи 56 действует, как жидкостный тормоз. На фиг. 2 указан также еще один тормозный цилиндр 5(5 с управляющим рычагом 57, служащий для
работы в качестве маневренного тормоза. Чтобы получить при этом свободное движение поршня 5, можно при включении маневренного тормоза открыть особую обходную линию, которая соединяет пространства выше и ниже поршня 5. В форме выполнения по фиг. 3 движение падающего груза 3 передается на самотормозяш,ий винтовой стержень 39 при помош,и зубчатого конического и цилиндрического привода 38, и таким образом опорной точке 8 сообщается перемеш,ение вверх. Когда определенная сила нажатия достигнута и наступило определенное сжатие пружины 40, то при помоЦди тяги 4J и рычага 42 муфта 43 расцепляется, так что точка 8 останавливается, и нажатие тормозного приспособления осуш,ествляется только падающим грузом. Штиндель 39 одновременно является маневренным тормозом, если его вращать от мотора 44. При этом муфта 43 также должна быть расцеплена, чтобы позволить свободное движение шпинделя при включенном грузе 3. Для этой цели служит электромагнит 45 у рычага 42, соединенный с моторной линией 46 так, что когда контроллер 47 мотора включен, то одновременно возбуж1;ен и электромагнит 45 и расцеплена муфта 43. При такой конструкции падающий груз 5 снова может быть поднят маневренным тормозом. Передача движения происходит при помощи самотормозящей передачи,а именно стержня 39, так что особых запорных приспособлений для предотвращения обратного перемещения точки 8 не требуется.
В форме выполнения по фиг. 4 передача происходит также при помощи не самотормозящегося привода, обратное же движение предотвращается при помощи стопорного механизма. Рычаг 2 в начале падения грузэ 3 жесткб связан при помощи коленчатого рычага 48 с дополнительной передачей - рычагом 50, поворачивающимся около точчи 49. Таким образом, движение падающего груза через жесткую копенчатую передачу при помощи рычага 50 передается на точку 8 до тех пор, пока не появится достаточная сила нажатия колодок тормоза, чтобы поднять груз 5/ коленчатой системы и таким образом расцэпить выключающий орган-муфту 48. Одновременно с движением точки 8 взерх под действием дополнительной передачи 50 рычаг 52 продвигает под левый конец ее самотормозящее стопорное приспособлениз - клин 55, так что после расцепления муфты 48 обратное перемещение точки 8 невозможно, и последняя служит осью вращения рычага 2, который поворачивается под действием груза 5. Рычаг 52 при помощи тяги 55 прикреплен к правому концу рычага 50с мертвым ходом, так чго клин 55 следует за ним с небольшим промежутком. Вместо утяжеленной грузом коленчатой системы (муфты) 48 может быть применена любая другая конструкция, действующая подобным же образом, которая представляет собою до известного давления жесткую систему, а при переходе через эгот прё)1ел расцепляется. Таким приспособлением является показанный пунктиром жидкостный катаракт 54, который одновременно будет служить для смягчения движения падающего груза. Преимущество конструкции по фиг. 2 и 4, по сравнению с устройством по фиг. 3, состоит в том, что передача движения может произойти с большим коэфициентом полезного действия, чем при применении самотормозящего передаточного механизма.
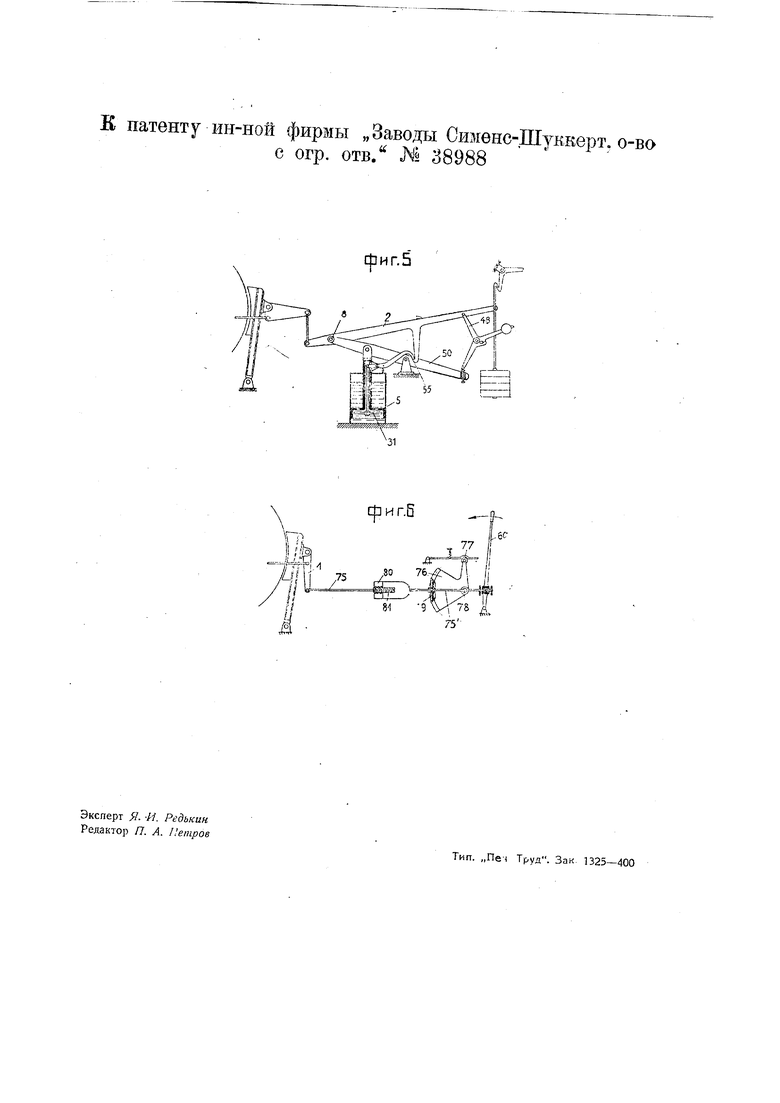
На фиг. 5 изображена конструкция, в которой передача перемещения происходит при помощи не самотормозящегося приспособления. Для заклинивания точки приложения второй силы здгсь служит поршень 5 жидкостного катаракта, который сАабжен обратным клапаном 5Л закрывающимся при начале обратного перемещения точки 8 и этим останавпивающим поршень. Целесообразно оставить обратный клапан открытым в течение времени, пока происходит движение взерх точки 8, для чего обратный клапан 5/ находится в зависимости от дальнейшего давления. Если система с тремя степенями свободы перемещается под действием двух сил, то должна иметься точка, остающаяся неподвижной при таком перемещении. В данном случае это есть точка 55 на рычаге 2, как видчэ из показанных положений системэ. На протяжении мертвого хода гормэза точка 55
таким образом остается неподвижной в пространстве; в тот же момент, когда, благодаря реакции тормозного устройства, начнет сдавать передаточная связь 48, служащая выключающим органом передачи, движение точки 8 прекратится, и следовательно, точка 55 должна испытать перемещение вниз. Это движение используется для воздействия на стопорный механизм.
На фиг. б показана конструкция, е которой перемещение приводного рычага 60 разлагается дополнительной передачей 76, 79 и переносится в точки приложения обеих сил. Регулирующий рычаг сдвигает при своем перемещении влево через посредство тяги 75 главный рычаг 7 тормоза, но, кроме того, он также сдвигает и зубчатый сектор 76, который сперва одерживается упором в точке 77, так что получается вращение сектора около оси 78. Это последнее вращение с помощью зубчатого колеса 79 передается на гайку 80, которая связана с самотормозящей осью 81 и при своем движении вывинчивает ее влево. Таким образом, на тормозном рычаге / складываются перемещение тяги 75, происходящее непосредственно от регулирующего рычага, и то, которое передается посредством сектора 76 и винтовой передачи SO, 8J. Когда колодки начнут нажимать, благодаря чему увеличится давление, точка 77 зубчатого сектора выскакивает из зажима, так что винтовая передача 80, 81 останавливается, и дальнейшее движение передается на тормозную систему-происходит увеличение действия силы при одинаковом усилии на регулирующем рычаге, другими словами начинает действовать полная сила с большим передаточным числом.
Предмет патента.
1. Устройство для передачи давления на рабочий орган, отличающееся тем, что рабочий орган управляется силой, действующей на него через диференциальную передачу, у которой точка опоры перемещается при помощи дополнительной передачи под действием той же силы.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что момент прекращения работы дополнительной передачи зависит от величины давления, производимого рабочим органом, или от величины пути, проходимого этим органом.
3.Форма выполнения устройства по пп. 1 и 2, отличающаяся тем, что дополнительная передача осуществлена в не самотормозящейся форме 50 (фиг. 4 и 5) и что прекращение работы этой передачи сопровождается включением самотормозящегося стопорного приспособления 53 (фиг. 4) или катаракта 5 (фиг. 5) с обратным клапаном 31.
4.Форма выполнения устройства по пп. 1 и 2, отличающаяся тем, что в качестве дополнительной применена гидравлическая передача 30 (фиг. 2).
5.Форма выполнения устройства по пп. 1 и 4, отличающаяся тем, что дополнительная передача снабжена смягчающими ее работу катарактами 5 (фиг. 5), 33 (фиг. 2).
6.Форма выполнения устройства па пп. 1-5, отличающаяся тем, что после выключения дополнительной передачи перемещение опорной точки 8 диференциальной передачи прекращается.
7.Форма выполнения устройства по пп. 1 - 6, отличающаяся тем, что для прекращения работы дополнительной передачи применены выключающие органы 33 (фиг. 2), 43 (фиг. 3), 48 (фиг. 5, 4), 54 (фиг. 4), каковые органы могут быть управляемы при помощи воздействия на них дополнительной передачи.
8.Форма выполнения устройства по пп. 1 - 7, отличающаяся тем, что для поглощения живой силы движущихся масс при остановке точки опоры диференцкальной передачи применены затормаживающие средства 30 (фиг. 2), 43 (фиг. 3), 54 (фиг. 4).
9.Форма выполнения устройства по пп. и 2, отличающаяся тем, что дополнительная передача осуществлена при посредстве конической зубчатки 7Р (фиг. б) и зубчатого сектора 76, поворотного около точки 77. Е патенту ин-ной фирмы , Заводы Сшенс-Шуккерт, о-во С огр. отв. № ооУоо
фнг.З
1r
if
l--,
((I
.
2
,И 38 I 43 Ц €j
1 «/fe
ф и г. в
EEtфиг. 4 к
-;HffH
Jlri /5
сриг.Б
фиг.Б
77
JH
81 Л. 75 патент) ин-ной фирмы „Заводы Сименс-Шуккерт. о-во с огр. отв/ As 38988

